
国際特許分類[F16H19/02]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段 (198,328) | 伝動装置 (51,171) | 本質的に歯車または摩擦部材のみからなり,無限に続く回転運動を伝達することができない伝動装置 (595) | 回転運動と往復運動を相互に変換するためのもの (587)
国際特許分類[F16H19/02]の下位に属する分類
ラックを用いたもの (355)
無端可撓部材を用いるもの (14)
国際特許分類[F16H19/02]に分類される特許
201 - 210 / 218
アクチュエータ装置
アクチュエータ装置(5)は、電動モータ式の調節駆動装置(7)と、第1及び第2の被駆動軸とを有している。アクチュエータ装置(5)はさらに、少なくとも1つの調節部材を有しており、この調節部材は、第1の被駆動軸及び/又は第2の被駆動軸と連結されている。調節部材は、伝達部材と連結するために構成されている。調節部材は、伝達部材と協働して第1の被駆動軸若しくは第2の被駆動軸の回転運動を伝達部材のリニア(線)運動に変換する。さらに、アクチュエータ装置(5)は補償伝動装置を有しており、この補償伝動装置は、入力側が電動モータ式の調節駆動装置(7)に連結されていて、第1の被駆動軸及び第2の被駆動軸を有している。補償伝動装置は、入力側のトルクを、第1の被駆動軸及び第2の被駆動軸に伝達し、かつ分割するように構成されている。 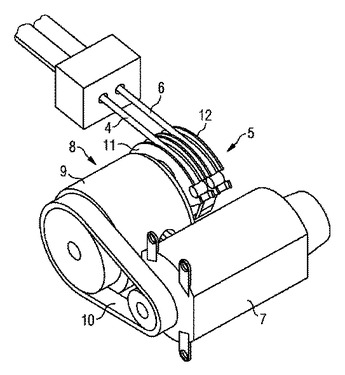 (もっと読む)
(もっと読む)
伝動ベルト用制振機構

【課題】伝動ベルトの既存構成をそのまま利用して、伝動ベルトの走行中に生じる振動を抑える伝動ベルト用制振機構を提供する。
【解決手段】複数のプーリ2,4間に掛け渡された伝動ベルト6の振動を抑える伝動ベルト用制振機構dmpであって、制振機構は、伝動ベルトに対向して配置された少なくとも1つの制振片d1,d2,d3,d4を備えている。この構成において、伝動ベルトには、当該伝動ベルトと共に移動する可動体14が固定されており、制振機構は、可動体を移動させる方向とは逆方向に走行する伝動ベルトに対向して配置されている。この場合、制振機構を可動体に連結しても良いし、或いは、制振機構を可動体とは分離して固定しても良い。
(もっと読む)
運動装置及びこれを用いたチップマウンター

【課題】 運動の加速性を高めることができ、且つ複数自由度の運動が得られる運動装置及びそれを用いたチップマウンターを提供する。
【解決手段】 第1のアクチュエータにより第1の自由度の運動をするように駆動される第1の主動部7と、第2のアクチュエータにより第2の自由度の運動をするように駆動される第2の主動部7とを有する運動装置1である。この運動装置1は、前記第1及び第2の主動部7の駆動力により従動する単一の従動部9と、前記従動により従動部9に生成される運動を、前記第1及び第2の主動部7の運動により許容される2自由度の運動に規制する規制手段と、前記規制手段により規制される2自由度の運動を許容しつつ前記第1及び第2の主動部7のそれぞれと前記従動部9とを係合する2つの係合部と、を備えている。
(もっと読む)
ナット、ネジおよびケーブルを備える伝達装置
モータ(5)と移動される器具(1,2)との間にあるネジ、ナットおよびケーブルを備える伝達装置(6、7、12、13、20および21)であって、少なくとも1個の二重滑車(14)を備え、その滑車は、ネジ(7)に近いケーブルライン(12)に関してその器具に近いケーブルライン(20)の移動を増幅する伝達装置。ネジ(7)により提供される移動の減少という通常の利点の一部を犠牲にすることにより、器具(1)についての一層大きい移動走行が、同一サイズの制約、またはネジ(7)の長さによる制約の場合に得られる。  (もっと読む)
(もっと読む)
直動機構
【課題】 真空状態で利用可能な低発塵型の直動機構を、簡易な構造で実現する。
【解決手段】 直動機構1を、案内レール41及びこの案内レール41に沿って移動する可動スライダ42を有する直動ガイドを、開口部23を有する防塵ケース21に収容し、この直動ガイドに案内される可動部43を、防塵ケース21の開口部23内において移動可能に配置し、可動部43を駆動する駆動ベルト38を、防塵ケース21の開口部23を塞ぐように配置して、構成する。
(もっと読む)
手動腰部支持体調節の多重巻きメカニズム
【課題】 アクチュエータの伝達を改良する。
【解決手段】
アクチュエータを開示する。アクチュエータは、出力歯車と、ピニオンと、駆動軸と、ハウジングと、ばねとを含む。出力歯車は牽引要素を受けるように構成されている。ピニオンは出力歯車と駆動連絡する。駆動軸はピニオンと連結される。ハウジングは、出力歯車および駆動軸を受けるように構成されている。コイルばねが、駆動軸の周辺で、駆動軸とハウジングとの中間の位置に配置され、それによって駆動軸の回転が、出力歯車が回転することができるように、コイルばねのハウジングからの摩擦係合解除を引き起こすようになっている。
(もっと読む)
ベルト駆動装置
【課題】ストッパ機構の位置調整が正確且つ容易にできると共に、タイミングベルトの歯飛びやベルト外れの防止を長期に渡って安定維持できるベルト駆動装置を提供する。
【解決手段】ベルト駆動装置14は、キャリッジモータにより回転駆動される駆動プーリと、ベースフレーム24に対して移動可能に配設されると共に張力調整ばね37により駆動プーリと離間する方向に付勢されるプーリホルダ31に回転自在に軸支される従動プーリと、駆動プーリと従動プーリとの間に巻き掛けられたタイミングベルト上に固定されたキャリッジと、従動プーリの駆動プーリ側への所定以上の移動を規制するストッパ機構40と、を備える。ストッパ機構40が、ベースフレーム24に回転自在に支持されると共に回転中心O1からの離間距離が徐々に変化する外周カム面39bを有するカム板39と、カム板39を回転不能にベースフレーム24に固定するネジ部材41とを有する。
(もっと読む)
マニピュレーター
【課題】手術支援用マニピュレーターやエネルギー機器などの狭隘部補修用マニピュレーターの小型化、高信頼性化、高剛性化、高操作性化を可能とする。
【解決手段】作業部と連結部と操作部を備え、該操作部からの操作指令が該連結部を通って該作業部に伝えられて該作業部を動作させるマニピュレーターにおいて、前記作業部からの操作指令を前記操作部に伝える動力伝達機構と、この動力伝達機構を駆動する、前記連結部まわりの偏心質量としての駆動装置と、を有し、前記動力伝達機構は、可撓性動力伝達部材と、該可撓性動力伝達部材が巻き掛けられる駆動側プーリ50と従動側プーリ51の一対のプーリと、を有し、マニピュレーターとしての基準姿勢時に、前記連結部まわりの偏心質量としての前記駆動装置が、前記連結部に対して概ね鉛直下向きに配置されるように、前記駆動側プーリと前記従動側プーリを、それらの回転軸が互いにねじれた状態に設置する。
(もっと読む)
伸縮機構及びこれを使用した伸縮可能なロボットアーム
【課題】 伸縮機構の伸縮作動量を、伸縮機構を作動させる送り機構の全長に比して増大させる。
【解決手段】 被駆動作動部材20は送り機構12の固定部材13aに対し移動される駆動部材13bに連結され、被駆動作動部材に相対移動可能に連結された作動部材25は、固定部材と被駆動作動部材との間の相対移動に応じて作動する連動機構30により相対移動される。作動部材に相対移動可能に次の作動部材を連結して同様に連動されるようにしてもよい。連動機構は、ラック・ピニオン機構、ベルト伝動機構、送りねじ機構などを用いて、往復運動と回転運動を相互に変換するものとするのがよい。この伸縮機構は伸縮可能なロボットアームとして使用するのに適している。
(もっと読む)
リニアアクチュエータ
リニアアクチュエータ、特に高さ調節可能なテーブル用の伸縮脚は、外部輪郭体(18)と、外部輪郭体の上端に取り付けられたスピンドル(7)と、スピンドル(7)を可逆電気モータに接続するトランスミッション(8)と、回転しないようにスピンドル(7)に取り付けられたスピンドルナット(11)と、1端がスピンドルナット(11)に取り付けられた中間輪郭体(10)と、外部輪郭体(18)の下端における中間輪郭体(10)用のガイドと、外部輪郭体(18)の下端に固定されかつガイドを介して内部輪郭体(14)と接続されたコード要素(12、20;26)とを備え、内部輪郭体が中間輪郭体(10)と共にスピンドルの回転によって入れ子状に外部輪郭体(18)から外に押し出されたり中に押し込まれるように構成される。内部輪郭体(14)が回転しないように中間輪郭体(10)に固定され、スピンドルナット(11)の回転固定が外部輪郭体(18)の長手方向ガイドによって構成される場合、それ自体は回転しないように固定されたアクチュエータ、つまり伸縮脚内に適用されたときに、脚を介する回転防止装置を持つ必要の無いアクチュエータが達成される。一般的に、該構造は細長く、よって細い伸縮テーブル脚内に使用することができる。 (もっと読む)
201 - 210 / 218
[ Back to top ]