
国際特許分類[F16H61/21]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段 (198,328) | 伝動装置 (51,171) | 回転運動を伝達するための変速あるいは逆転伝動装置の制御機能 (12,590) | エンジンブレーキの制御を与えるもの (27)
国際特許分類[F16H61/21]に分類される特許
21 - 27 / 27
車両制御装置
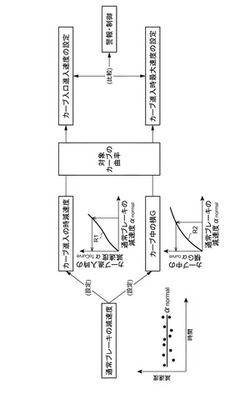
【課題】データ量を抑えることができ、実現性の向上を図ることができる車両制御装置を提供する。
【解決手段】車両制御装置1では、運転者の通常ブレーキの減速度αnormalに基づいてカーブの入口に到達したときの車速Vcurve及びカーブへの進入時における最大車速Vthreshを求め、車速Vcurveが最大車速Vthreshよりも大きい場合に、運転支援制御を実施させている。このように、運転者の通常ブレーキの減速度αnormalを記憶するだけで、適切な運転支援を行うことができるため、運転者毎にカーブ等のパラメータを記憶する必要がない。したがって、データ記憶容量に記憶されるデータ量を抑えることができ、実現性の向上を図ることができる。
(もっと読む)
作業車両

【課題】簡易な構成により、作業機接続に伴って制動力が付加されて路上等における移動走行の際の安定走行を確保することができる作業車両を提供する。
【解決手段】作業車両は、作業機(F)を接続するヒッチ(H)と、走行伝動系に介設して摩擦ローラ(5)によって無段階の変速比で動力を伝達するトロイダル無段変速伝動部(4)と、その変速比を制御することによりアクセルペダル(N)の踏込みに応じた目標車速まで駆動制御するとともに、アクセルペダル(N)を戻した時に所定の逆トルクによる制動制御をする制御部(G)とを備えて構成され、上記ヒッチ(H)には、作業機(F)の接続を検出する接続センサ(R)を設け、その検出信号を受けて上記逆トルクを所定の倍率で増加する係数切替制御を上記制御部(G)に設けたものである。
(もっと読む)
減速支援システム
【課題】車両の運転者に違和感を与えることを抑制しつつ、減速支援を行う。
【解決手段】減速支援システム(10)は、車両(1)に搭載され、車両が右折又は左折する際に、車両の運転者が、右折又は左折のためにハンドルの操舵を開始する位置である操舵開始位置を学習する学習システム(109)と、運転者の右左折意思を確認する意思確認手段(109)と、車両の現在位置と、学習された操舵開始位置との間の距離を算出可能な距離算出手段(109)と、意思確認手段によって運転者の右左折意思が確認され、且つ学習システムによって操舵開始位置が学習されている場合、距離算出手段によって算出された距離に応じて減速支援を行う減速支援手段(109)とを備える。
(もっと読む)
油圧制御装置
【課題】エンジンにより駆動されるオイルポンプの油圧をアキュムレータに蓄圧する油圧制御装置を提供する。
【解決手段】動力伝達装置の動力伝達状態を制御する油圧室と、エンジンにより駆動される第1オイルポンプと、電動モータにより駆動され、かつ、第1オイルポンプよりも容量が大きい第2オイルポンプと、第1オイルポンプまたは第2オイルポンプから吐出された油圧を蓄圧するアキュムレータとを有し、第1オイルポンプまたは第2オイルポンプのいずれか一方から吐出された油圧をアキュムレータに蓄圧する油圧制御装置において、油圧室のオイルの消費量が変化するかしないかを判断する判断手段(ステップS1,S2,S3)と、動力伝達装置の油圧室におけるオイルの消費量が変化しないときに、第1オイルポンプの油圧をアキュムレータに蓄圧する蓄圧手段(ステップS4,S5)とを備えている。
(もっと読む)
自動降坂速度制御システム
機械の降坂速度を自動的に制御する方法。この方法は、現在の機械速度に基づいて目標機械速度を決定するステップと、勾配が所定の閾値より大きいこと、等の少なくとも1つのトリガ条件が満たされたか否かを判断するステップと、を含む。条件が満たされた場合、この方法は、制御システムを有効化して、パワートレインリターダとトランスミッションギアチェンジのうちの少なくとも一方を制御して、目標機械速度の超過を防止する。 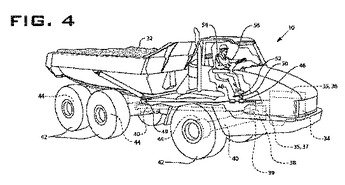 (もっと読む)
(もっと読む)
車両用駆動装置
【課題】モータ走行中における制動力を利用して効率的に発電を行なうことが可能な車両用駆動装置を提供する。
【解決手段】モータ7で回生しつつ5th EVモードから3rd EVモードへシフトダウンする間、エンジン6を始動して第2変速用シフター52で第4速用駆動ギヤ24aを選択した状態で第2クラッチ42を締結することにより、エンジンブレーキを利用してシフトダウン時の制動力を確保する。
(もっと読む)
自発的な燃料/ペダルオフ時の自動車の自動変速機を制御する方法
【課題】自発的な燃料/ペダルオフ(ファストオフ)時の自動車の自動変速機を制御する方法を提供する。
【解決手段】自動変速機は加速ペダルを介して影響を受ける内燃機関によって駆動され、ペダル位置に比例した信号がシフトマップを内蔵する電子式変速機制御装置へ送られ、ペダル位置グラジエント(PSTG)がペダル位置グラジエント限界値(KF_PSTG)よりも小である場合に自発的な燃料/ペダルオフ(ファストオフ)が認識されてアップシフトブロック(FFO=1)が実行される。アップシフトブロック(FFO=1)の状態は、エンジン回転数(NMO)と等価の関数として設定されたトラクション・エンジンブレーキ特性曲線(KL_ZS)を実際のエンジンモーメント(MMM)が上回った場合に、トラクション運転を認識するのに伴い、全走行抵抗(GFW)に関連した車加速度/減速度及びペダル位置グラジエント限界値に関連して解消される。
(もっと読む)
21 - 27 / 27
[ Back to top ]