
国際特許分類[G01B11/24]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 光学的手段の使用によって特徴づけられた測定装置 (13,565) | 輪郭または曲率の測定用 (3,716)
国際特許分類[G01B11/24]の下位に属する分類
複数の,固定された,同時に作動する変換器を用いるもの (241)
対象物にパターン,例.モアレ縞,を投影することによるもの (502)
曲率半径測定用 (29)
国際特許分類[G01B11/24]に分類される特許
61 - 70 / 2,944
回転駆動機構
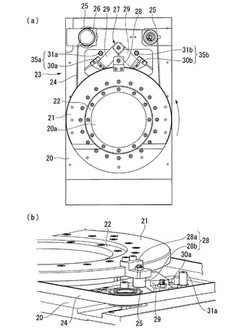
【課題】複雑な加工を必要とすることなく、有線の装置を360度またはこれを少し超える程度の角度で回転させることができるようにした、回転駆動機構を提供する。
【解決手段】有線装置を搭載して、基板20に対し正逆方向に回転可能に設けられた回転テーブル21と、回転テーブル21に設けられた第1ドグ28と、基板20に設けられて第1ドグ28に押圧されることで変位する第2ドグ29と、第2ドグ29の変位によって押圧されることで回転テーブル21の回転を停止させる一対の規制部とを備えた回転駆動機構である。一対の規制部は回転テーブル21が初期位置から360度以上の設定角度正回転した際に、第2ドグ29に押圧されるように基板20上に配置された第1規制部35aと、回転テーブル21が初期位置から360度以上の設定角度逆回転した際に、第2ドグ29に押圧されるように基板20上に配置された第2規制部35bとを有している。
(もっと読む)
膜厚測定装置及び膜厚測定方法

【課題】被測定対象に施される遮熱コーティングの膜厚を効率良く正確に測定することが可能な膜厚測定装置及び膜厚測定方法を提供することを目的とする。
【解決手段】膜厚測定装置1は、タービン翼11に形成された遮熱コーティング膜の膜厚を測定するECTセンサ4と、遮熱コーティング膜の膜厚を測定する地点であるタービン翼11上の測定地点を記憶している記憶手段9と、タービン翼11の形状を測定するレーザ変位計5と、レーザ変位計5によって測定された測定されたタービン翼11の形状と、記憶手段9に記憶されているタービン翼11上の測定地点に基づいて、ECTセンサ4による実際の膜厚測定に適した実測定地点を算出する測定位置算出手段8と、測定位置算出手段8によって算出された実測定地点に基づいて、ECTセンサ4を駆動して、ECTセンサ4の測定位置を調整するアーム駆動手段6とを備える。
(もっと読む)
表面形状計測装置
【課題】散乱光の空間分布がマイクロラフネスの差異に応じて、前方/後方/側方と色々な方向に変化することについて配慮し、特にエピタキシャル成長ウェハに出現するステップ・テラス構造は散乱光分布に異方性が生じることに配慮した表面形状計測装置を提供する。
【解決手段】試料1表面に光を照明し、光軸の方向が互いに異なる複数の検出光学系51,52により散乱光の空間分布を検出し、試料1表面の空間周波数スペクトルを算出する。
(もっと読む)
対象物体の検出方法、検出装置及びプログラム
【課題】対象物体を3次元の点群として計測した場合の形状データに基づいて、高速化を図りつつ精度よく対象物体を検出することの可能な検出方法を提供する。
【解決手段】3次元計測手段から3次元の計測点群として球体の形状データを取得する形状データ取得ステップ(S1)と、仮想座標空間において球体が占める対象体領域を各計測点の付加情報に従って区画する領域分割ステップ(S41)と、分割された各対象体領域の中から球体と推定される推定領域を抽出する対象体領域抽出ステップ(S43)と、推定領域毎に推定球体を生成し、対象体と認識される推定対象体を認識対象体とする対象体認識ステップ(S44)とを備える。
(もっと読む)
表面形状測定方法および装置
【課題】 表面形状測定において、測定対象面と参照面からの反射光により干渉縞を発生させ、各画素の位相を単色光ごとに求め、表面形状を測定において、波長の異なる複数の単色光を得る場合は、抽出手段を増設する必要が生じていた。
【解決手段】 照射手段を介して測定対象面と参照面に波長の異なる複数の単色光を照射し、測定対象面と参照面の両方から反射して同一光路を戻る反射光によって生じる干渉縞の強度値に基づいて、測定対象面の表面高さと表面形状を求める表面形状測定方法において、前記照射手段が、広帯域な波長特性を有する照射光から、音響光学フィルタを用いて任意の異なる波長の単色光を複数抽出し、同時に混在して照射する照射手段を用いる。
(もっと読む)
円形状測定方法および装置
【課題】高価な専用装置を用いることなく、平面上の円形パターンをマルチステップ法により高精度に測定できる円形状測定方法および装置を提供する。
【解決手段】円形パターンを有する被測定物Wを載置するテーブル10、テーブルの回転機構20、画像プローブ30、画像プローブを移動させる移動機構40、制御装置50を有する円形状測定装置を準備する。画像プローブを円形パターンの円周に沿って移動させながら、円形パターンの円周を360°/mピッチで測定する工程と、円形パターンの中心を基準に360°/mだけテーブルを回転させて円形パターンの円周上の同一点を測定する測定動作を、360°/mずつテーブルを回転させながら合計m回行ってm個の測定データを取得する工程と、このm個の測定データから円形パターンの形状成分を求める工程を備える。
(もっと読む)
パターン検査装置及びパターン検査方法
【目的】マスクに形成されたパターン自体の位置精度の均質性を検査可能な検査装置を提供する。
【構成】検査装置100は、離散的な領域を撮像した際に取得されたそれぞれの光学画像中の図形の寸法と、対応する参照画像中の図形の寸法との間での第1の位置ずれ量を用いて、被検査領域全体における第1の位置ずれ量マップを作成するマップ作成回路131と、検査領域全体を撮像した際に取得されたそれぞれの光学画像中の図形の寸法と、それぞれ対応する参照画像中の図形の寸法との間での第2の位置ずれ量を用いて、被検査領域全体における第2の位置ずれ量マップを作成するマップ作成回路132と、第2の位置ずれ量マップを、第1の位置ずれ量マップと第2の位置ずれ量マップとの第1の差分マップで補正した第3の位置ずれ量マップに定義される各値のうち、許容値を超える値の有無を判定する判定回路156と、を備えたことを特徴とする。
(もっと読む)
形状計測方法、形状計測装置、プログラム及び記録媒体
【課題】被検物の裏面からの不要反射光の影響を除去して、被検物の被検面の形状を高精度に計測すること。
【解決手段】記憶制御部161は、理想被検面での反射による第1の基準反射光スポットの位置及び光量分布をHDD133に記憶させる。更に、記憶制御部161は、理想裏面での反射による第2の基準反射光スポットの位置及び光量分布をHDD133に記憶させる。取得部162は、被検面からの第1の反射光スポット及び裏面からの第2の反射光スポットを含む画像データをカメラ110から取得する。フィッティング部165は、HDD133に記憶された第1及び第2の基準反射光スポットの光量分布を合成させる。フィッティング部165は、その合成光の光量分布が、実際の合成光の光量分布と一致するように、第1及び第2の基準反射光スポットをフィッティングさせる。計算部166は、フィッティング結果に基づいて被検面の形状を計算する。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、デバイス製造方法、並びに計測方法
【課題】計測対象面の凹凸に起因する面位置センサの計測誤差の補正データを作成し、該補正データを用いて計測精度が改善される面位置センサを用いて、移動体を高精度に2次元駆動する。
【解決手段】 X干渉計127、Y干渉計16を用いて位置を監視しながらウエハステージWSTを移動させ、センサ72a〜72dを用いてウエハステージ上面に設けられたYスケール39Y1,39Y2のZ位置を計測する。ここで、例えば、2つの面位置センサ72a,72bの計測結果の差より、Yスケール39Y2のY軸方向の傾きが得られる。Yスケール39Y1,39Y2の全面について傾きを計測することにより、それらの2次元凹凸データが作成される。この凹凸データを用いてセンサの計測結果を補正し、該補正済みの計測結果を用いることにより、高精度にウエハステージを2次元駆動することが可能になる。
(もっと読む)
形状計測装置、横座標校正方法及び光学素子の製造方法
【課題】汎用性の高い横座標の校正方法によって横座標を校正する形状計測装置、及びその横座標校正方法を提供する。
【解決手段】複数の開口が形成され、これら複数の開口の配列によって校正パターンを形成するアパーチャー板20をワークWの被検面Wsの前面に配置する。この開口を通過すると共に、被検面Wsで反射され、再度開口を通過した測定光Lmを撮像素子5によって検出する。撮像素子上にて結像した校正パターンの横座標位置と、予め計測されている校正パターンの基準横座標位置とを、演算装置7によって比較することによって、形状計測装置1の横座標を校正する。
(もっと読む)
61 - 70 / 2,944
[ Back to top ]