
国際特許分類[G01C17/38]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | コンパス;航行もしくは測量のために真北または磁北を探知する装置 (352) | コンパスの試験,較正,または補償 (153)
国際特許分類[G01C17/38]に分類される特許
41 - 50 / 153
ナビゲーション装置、補正値初期化方法及びナビゲーション機能付携帯電話機
【課題】地磁気センサによる方位の検出精度を高め得るようにする。
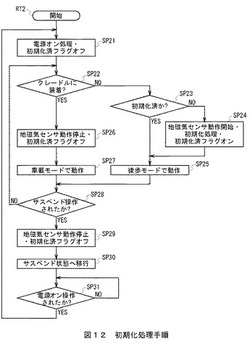
【解決手段】PND1の制御部11は、サスペンド状態から電源オン状態に切り替えられた際、地磁気センサ8から得られた地磁気データTMDを補正するための補正値を含む学習値LN及びその変動幅を制限する学習レベルLLについて、方位算出部28により初期化処理を行う。これにより方位算出部28は、サスペンド状態への移行直前と比較して周囲の磁場が大きく異なる場合や、サスペンド中にPND1内の金属部品等における磁化が変化した場合にも、学習値LNおよび学習レベルLLを確実に最初の値に戻し、学習し直すことができる。
(もっと読む)
電子式方位計、電子式方位計の調整方法および製造方法

【課題】 複数のステップモータを備えた電子式方位計において校正処理を短時間で行えるようにする。また、校正処理の時間短縮によって工程コストの低減を図れる電子式方位計の調整方法および製造方法を提案する。
【解決手段】 ステップモータのロータ57a,62aの向きがパターンA〜Dの組み合わせパターンの状態で、且つ、第1〜第4の方向I〜IVから外部磁界を印加したときの方位センサ53のセンサ出力値から、方位センサ53の校正処理を行う場合に、パターンAの状態でのみ第1〜第4の方向I〜IVから外部磁界を印加したときの各センサ出力値を取得する一方、パターンB〜Dの状態では第1方向Iから外部磁界を印加したときのセンサ出力値を取得して、残りのセンサ出力値は計算により求める。
(もっと読む)
電子式方位計
【課題】 北方位補正により指針が指し示す方位の校正処理を行う場合に、計測された磁北の方向に対してどの程度の補正が行われるのかユーザが直感的に認識することのできる電子式方位計を提供する。
【解決手段】 外部から操作可能にされたリューズスイッチを備え、北方位補正のモード中、リューズスイッチから回転操作信号が発生されるごとに(S41,S42)、指針を順方向や逆方向に1ステップ回転させるとともに(S45,S46)、方位補正値記憶部に記憶される補正値βを1ステップ分の角度(±6゜)ずつ変更していく。
(もっと読む)
磁気データ処理装置、磁気データ処理方法および磁気データ処理プログラム
【課題】3次元磁気センサが特定の軸周りを回転している状態において、その回転軸方向に磁気データのオフセットが補正されることができる磁気データ処理装置を提供する。
【解決手段】磁気データ処理装置1は、3次元磁気センサ20から出力される磁気データを順次取得しながら4つ以上の所定数の前記磁気データを母集団として繰り返し蓄積する蓄積手段91と、前記所定数の母集団が蓄積される度に前記母集団が拡散しているか否かを第一閾値および第二閾値を用いて判定する判定手段92と、前記母集団が平面的に拡散しているとともに前記第一平面と前記第二平面とのなす角が無視すべき程度に小さくない場合、前記第一平面と平行な方向に前記現在のオフセットが移動するように前記母集団に基づいて前記現在のオフセットを更新するオフセット更新手段93とを備える。
(もっと読む)
磁気データ処理装置、磁気データ処理方法および磁気データ処理プログラム
【課題】3次元地磁気センサから出力される地磁気データのオフセット誤差を補正する磁気データ処理装置を提供する。
【解決手段】3次元磁気センサ20から出力される磁気データを順次取得しながら前記磁気データを母集団として繰り返し蓄積する蓄積手段91と、前記母集団が蓄積される度に、球面の方程式から導かれる目的関数f(p)の最小値を前記母集団の信頼指数Sとして導出し、前記母集団を十分信頼できるか否かを前記信頼指数Sを用いて判定する判定手段92と、前記母集団を十分信頼できる場合、前記母集団に基づいて前記磁気データのオフセットを導出するオフセット導出手段94a、94bと、を備える。
(もっと読む)
磁気データ処理装置、磁気データ処理方法および磁気データ処理プログラム
【課題】真のオフセットの近くに3次元磁気データのオフセットを短期間に収束させる。
【解決手段】3次元磁気センサから出力される磁気データを順次取得しながら4つ以上の所定数の前記磁気データを直近母集団として繰り返し蓄積する。前記直近母集団としての前記磁気データより前に前記3次元磁気センサから出力される前記磁気データを過去母集団として過去母集団記憶手段93に記憶する。前記直近母集団、さらには直近集団と過去集団からなる混合集団に基づいて判定手段92によって所定の条件を満たしているかどうか判定して、磁気データのオフセットを導出する。
(もっと読む)
地磁気センサの補正装置及び方位表示装置
【課題】磁気ノイズの影響を受けた地磁気センサの地磁気データを精度よく補正することができる地磁気センサの補正装置及びこれを用いた方位表示装置を提供する。
【解決手段】画面の明るさ設定に応じて蛍光表示管4から発せられる磁気に起因した地磁気センサ2の出力変動の補正値を算出する補正式(a)を用いて、蛍光表示管4の画面の明るさ設定に応じた地磁気センサ2の出力変動を補正する。
(もっと読む)
センサ較正装置
【課題】簡易的な構成で多軸センサの較正を行なうこと。
【解決手段】センサ較正装置100は、回転軸113の軸方向を検出し、検出された回転軸113の軸方向に基づいて、多軸センサの複数の感度軸の中から較正対象となる感度軸を決定する。そして、センサ較正装置100は、較正対象に決定された感度軸の出力値を多軸センサから取得して保存する。これにより、簡易的な構成で多軸センサの較正を行なうことができる。具体的には、回転台装置110を90度転倒させて、1軸の回転運動の向きを変えて使用することにより、複数の回転運動に必要な関節機構や動力伝達機構が不要となり、装置構造を単純化することができる。また、地球の地磁気と重力とを利用して較正を行なうため、特殊な測定環境(磁気暗室、人工重力装置など)を用意する必要がない。
(もっと読む)
車載用電子コンパス
【課題】磁気ノイズを検出する手段を設ける上での部品点数の増加を回避しつつ、方位演算の信頼性を的確に確保することのできる車載用電子コンパスを提供する。
【解決手段】この車載用電子コンパスは、互いに直交する3軸方向の磁気成分を検出する3つの磁気検出素子2a〜2cを有する磁気センサ2を備え、磁気センサ2に印加される地磁気を3軸方向の磁気成分に分解して磁気センサ2により検出するとともに、検出した磁気成分に基づいて車両の進行方向の方位を演算し、演算した方位を表示装置3に表示する。ここでは、磁気検出素子2a及び磁気検出素子2bの出力信号Sx,Syに基づいて車両の進行方向の方位を演算しつつ、磁気検出素子2cの出力信号Szの経時的な変化に基づいて磁気ノイズの有無を監視する。そして、磁気ノイズのレベルに応じて表示装置3に表示される方位の表示色を変更する制御を実行する。
(もっと読む)
加速度センサ及び地磁気センサを用いて歩行者の進行方向を決定する携帯端末、プログラム及び方法
【課題】歩行者が携帯端末を手持ちで歩行している場合に、その携帯端末の加速度センサ及び地磁気センサを用いて、歩行者の進行方向を正確に決定する携帯端末等を提供する。
【解決手段】携帯端末は、腕振りに基づく加速度面に対する法線ベクトルとなる歩行基準ベクトルを算出する歩行基準ベクトル算出手段と、重力ベクトルとそれに対応する地磁気ベクトルとを導出し、両ベクトルの方位基準面に対する法線ベクトルとなる方位基準ベクトルを算出する方位基準ベクトル算出手段と、両ベクトルに基づいて進行方向の方位角を算出する方位角算出手段とを有する。歩行基準ベクトル算出手段は、時間経過に伴う合成加速度の変化の中で、極小点同士の間の時間間隔を計測し、隣り合う2つの時間間隔を比較し、長い時間間隔の終点時の極小点は加速度面前方(進行方向前方)を表し、短い時間間隔の終点時の極小点は加速度面後方(進行方向後方)を表す。
(もっと読む)
41 - 50 / 153
[ Back to top ]