
国際特許分類[G01C17/38]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | コンパス;航行もしくは測量のために真北または磁北を探知する装置 (352) | コンパスの試験,較正,または補償 (153)
国際特許分類[G01C17/38]に分類される特許
11 - 20 / 153
地磁気測定装置、地磁気測定方法および地磁気測定プログラム
【課題】正確な地磁気の値を検出する。
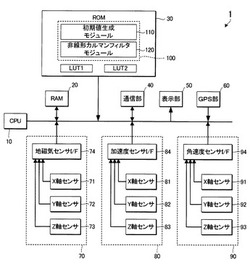
【解決手段】携帯電話機1は、初期値生成モジュール110と非線形カルマンフィルタモジュール120とを備える地磁気測定プログラム100を格納したROM30、地磁気検出部70、加速度検出部80、及び角速度検出部90を備える。非線形カルマンフィルタモジュール120は、非線形カルマンフィルタKFの演算を実行して、地磁気の強さrを表すための第1変数ρと、地磁気の伏角θを表すための第2変数ηとを要素として含む状態ベクトルxkを推定する。
(もっと読む)
自律測位に用いる重力ベクトルを補正する携帯装置、プログラム及び方法

【課題】自律測位機能を有する携帯装置について、その装置を保持する態様の個人差に関係なく、重力ベクトルを補正する携帯装置、プログラム及び方法を提供する。
【解決手段】地磁気センサから出力された所定期間内の複数の地磁気データを蓄積する地磁気バッファ手段と、自律測位手段から出力された所定期間内の複数の推定方位角dを蓄積する推定方位角バッファ手段と、推定方位角バッファ手段に蓄積された複数の推定方位角dが、一様分布であるか否かを判定する方位角分布検定手段と、方位角分布検定手段によって一様分布であると判定された際に、地磁気バッファ手段に蓄積された地磁気データから、その円錐の中心軸となる重力ベクトルを算出し、該重力ベクトルを自律測位手段へ出力する重力ベクトル算出手段とを有する。これによって、自律測位手段は、重力ベクトル算出手段から入力した重力ベクトルを用いて、推定方位角dを補正する。
(もっと読む)
自律測位に用いる重力ベクトルを補正する携帯装置、プログラム及び方法
【課題】携帯装置を保持する態様の個人差に関係なく、重力ベクトルを補正することができる携帯装置、プログラム及び方法を提供する。
【解決手段】携帯装置は、加速度データ及び地磁気データを用いて重力ベクトルを算出し、推定方位角dを出力する自律測位手段と、先の時刻の絶対位置と後の時刻の絶対位置とから絶対方位角θを導出する絶対方位角導出手段とを有する。また、推定方位角d及び絶対方位角θと、地磁気データにおける地磁気ベクトルの伏角φとから、ピッチオフセットpを算出し、そのピッチオフセットpを自律測位手段へ出力するピッチオフセット算出手段を更に有する。自律測位手段は、ピッチオフセットpによって補正した重力ベクトルを用いて推定方位角dを算出する。
(もっと読む)
地磁気測定装置、オフセット決定方法、及びオフセット決定プログラム
【課題】外部磁界の影響の程度を評価してオフセット値の採否を決定する。
【解決手段】機器1は、内部磁界Biを発生させる部品と、3次元磁気センサ60と、CPU10とを備える。CPU10は、3次元磁気センサ60から順次出力される複数の磁気データqiで示される座標が内部磁界Biの成分を示す座標を中心点とする球面Sの近傍に確率的に分布すると仮定して、球面Sの中心点x0を算出し、複数の磁気データqiで示される座標が、球面と曲面SXとを重ね合わせることで得られる立体SDの表面近傍に確率的に分布すると仮定して導入された、複数の磁気データqiで示される座標と立体SDの表面との誤差を表す目的関数f2(E、x)の値を最小化するときの、目的関数f2(E、x)における曲面SXを表す成分k(E)に基づく第1評価値f3(E)が所定の大きさ以下の場合に、中心点x0を3次元磁気センサ60のオフセットとして採用する。
(もっと読む)
端末装置及び地磁気環境判定プログラム
【課題】端末装置及び地磁気環境判定プログラムにおいて、観測地点の周囲の外乱磁気による影響を抑制して自律測位の信頼性の低下を防止可能とすることを目的とする。
【解決手段】互いに直交する3軸方向の地磁気を検出する地磁気検出部と、3軸方向の加速度を検出する加速度検出部と、検出した地磁気及び加速度に基づいて地磁気を表す地磁気ベクトルを鉛直方向に投射した鉛直成分を算出する鉛直成分算出部と、算出した鉛直成分の一定時間内における分散を算出する分散算出部と、前記分散と閾値との比較に基づいて前記地磁気の信頼性を示す地磁気尤度を判定して出力する地磁気尤度判定部を備えるように構成する。
(もっと読む)
磁気データ処理装置、磁気データ処理方法及び磁気データ処理プログラム。
【課題】磁気データ測定装置のオフセットを更新する。
【解決手段】機器1は、内部磁界を発生させる部品と3次元磁気センサ60とCPU10とを備える。CPU10は、3次元磁気センサ60から順次出力される複数の磁気データに基づいて、部品の発生する磁界の成分を表す3軸の座標であるオフセットを、旧オフセットから新オフセットに更新する。新オフセットは、複数の磁気データで示される座標を表面近傍に有する球面と磁気データで示される座標との誤差を第1誤差、複数の磁気データの分散を表す共分散行列の最小固有値に対応する正規化された固有ベクトルと旧オフセットから見た球面の中心の座標を示す更新ベクトルとの内積に第1係数を乗じた第2誤差、及び共分散行列の中間固有値に対応する正規化された固有ベクトルと更新ベクトルとの内積に第2係数を乗じた第3誤差を要素とする誤差ベクトルの大きさを最小化する球面の中心の座標として算出される。
(もっと読む)
地磁気を測定し、利用する応用機器
【課題】方位球が楕円球となる場合のオフセット計算に最適な測定点選択方法を備えた地磁気を測定し、利用する応用機器を提供する。
【解決手段】 3軸の磁気センサと、測定点取得手段と、磁気センサのオフセットを校正する校正手段と、方位計算手段からなる地磁気を測定し、利用する応用機器であって、
前記校正手段が、前記地磁気ベクトルの少なくとも6点からなる測定点を前記測定点取得手段により前記測定点格納部に格納されたデータ群の中から選択し、オフセット計算用測定点格納部に選択された測定点を格納するオフセット計算用測定点選択手段を備え、
前記オフセット計算用測定点選択手段は、前記測定点格納部に格納されたデータ群の中から直交する3軸の各軸毎の成分値が最大と最小となる6点を少なくとも含むように選択することを特徴とする。
(もっと読む)
電子コンパス
【課題】簡単な操作で方位球の中心点を正確に算出できる電子コンパスを提供する。
【解決手段】3軸直交座標系の第1軸を磁北方向に直交する方向へ向けた状態で、該第1軸を中心軸として携帯機器2を回転させる第1操作が行われている間に複数個の検出値を取得する。また、第2軸を磁北方向に直交する方向へ向けた状態で、該第2軸を中心軸として携帯機器2を回転させる第2操作が行われている間に複数個の検出値を取得する。そして、得られた複数個の検出値を用いて方位球7の中心点O’を算出する。方位球7の中心点O’と3軸直交座標系の原点Oとのずれに基づいて、3軸磁気センサ3による磁気ベクトルMの検出値を補正する。そして、補正後の検出値を用いて、携帯機器2の向く方位を算出する。
(もっと読む)
磁気センサ出力補正回路、磁気センサ出力補正方法及び方位角計測装置
【課題】感度とオフセット値とを一括して、従来例に比較して高精度かつ高速に推定し、磁気センサの出力の校正ができる磁気センサ出力補正回路、磁気センサ出力補正方法及び方位角計測装置を提供する。
【解決手段】本発明の磁気センサ出力補正回路は、感度及びオフセット値を変数として有する、3軸の磁気センサによって得られた磁気データを補正する補正式を、重力ベクトルに垂直な平面と、磁気センサのx軸方向及びy軸方向の形成する平面とがなす傾斜角が、0となるよう座標変換して得られる1次の変換式に対し、異なる地点で測定した複数の磁気データ及び傾斜角を代入して得られる線形連立方程式を解くことにより、測定した磁気データに含まれる感度及びオフセット値を算出する感度・オフセット算出部と、感度・オフセット算出部が算出した感度及びオフセット値により、磁気センサの測定する磁気データの補正を行う感度・オフセット補正部とを有する。
(もっと読む)
撮影装置
【課題】 地磁気センサを搭載した撮影装置において、変位することで地磁気センサに及ぼす磁気的な影響量が変化する部品があっても、この影響を排除して正確な方位の計測を行えるようにすることにある。
【解決手段】 地磁気を検出する地磁気センサと、撮像を行う撮像部と、地磁気センサに磁気的な影響を及ぼす部位を含み、当該部位の位置が可変にされた可動部と、この可動部の変位量と可動部から地磁気センサに及ぼされる磁界との関係を表わす変位量対磁界データが記憶された記憶手段と、変位量対磁界データと前記可動部の変位量とに基づいて可動部から地磁気センサに及ぼされる磁界を求め(S8〜S10)、この磁界を地磁気センサの出力から差し引いて方位を算出する(S11)方位算出手段とを備えている。
(もっと読む)
11 - 20 / 153
[ Back to top ]