
国際特許分類[G01C17/38]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | コンパス;航行もしくは測量のために真北または磁北を探知する装置 (352) | コンパスの試験,較正,または補償 (153)
国際特許分類[G01C17/38]に分類される特許
51 - 60 / 153
異常磁気検出装置、磁気ジャイロ、電子コンパス

【課題】磁気センサに異常な磁気が作用した場合に警告を発することができる異常磁気検出装置と、それを用いた磁気ジャイロおよび電子コンパスを提供する。
【解決手段】互いに直交する3軸方向における、地磁気ベクトルの各ベクトル成分を検出する3軸磁気センサ21を備える。また、ベクトル成分から地磁気ベクトルの絶対値を算出する絶対値算出手段11を備える。また、地磁気ベクトルの絶対値から、予め定められた値よりも周波数が高い磁気高周波数成分を抽出する高周波数成分抽出手段12を備える。さらに、磁気高周波数成分が予め定められた許容範囲を超えた場合に、3軸磁気センサ21が異常な磁気を検出したと判断する磁気安定性判断手段13を備える。そして、3軸磁気センサ21が異常な磁気を検出したと判断された場合に、警告信号を出力する警告信号出力手段14を備える。
(もっと読む)
電子コンパスをテストするシステム及び方法

【課題】本発明は、電子コンパスをテストするシステム及び方法に関するものである。
【解決手段】本発明に係る電子コンパスをテストするシステムは、計算モジュール、駆動モジュール、電磁素子及び電磁干渉遮断装置を備え、前記計算モジュール、前記駆動モジュール及び前記電磁素子は、前記電磁干渉遮断装置の内部に設置され、前記駆動モジュールは、前記計算モジュール及び前記電磁素子に電気接続され、一つの電子コンパスの周囲を環状に移動するように前記電磁素子を駆動し、前記計算モジュールは、前記駆動モジュール及び前記電子コンパスに電気接続され、前記駆動モジュールによって移動した前記電磁素子の実際位置を読み取り、前記電子コンパスによって検出した電磁素子の位置を読み取り、前記電磁素子の実際位置と検出した位置との間の位置誤差を計算して、位置誤差を表示する。また、本発明は、電子コンパスをテストする方法を提供する。
(もっと読む)
携帯電子機器及び地磁気センサ較正方法
【課題】電磁結合による非接触通信に伴う地磁気の検出精度の低下等に起因する方位に関する表示制度の低下を抑制できる携帯電子機器とその地磁気センサ較正方法を提供する。
【解決手段】非接触通信機能部(111)において非接触通信が行われた場合、その通信の終了後に地磁気センサ(110)のキャリブレーションに関わる処理および方位の算出する処理を実行することにより、非接触通信に伴う方位に関する表示精度の低下を抑制する。
(もっと読む)
電子式方位計および方位補正制御方法
【課題】電子式方位計において2点補正などの較正処理を比較的容易に且つ精度良く行えるようにすることである。
【解決手段】第1のスイッチ入力があった際に、地磁気検出手段から出力されている前記第1と第2のデータを記憶させる第1の記憶制御手段(ステップS24)と、第1のスイッチ入力時に前記方位表示手段が指し示していた方位を算出して記憶させる方位記憶制御手段(ステップS25)と、第1のスイッチ入力の後で、第2のスイッチ入力の待機中に、機器本体が回転されても前記記憶されている方位が指し示されるように方位表示手段を制御する特定方位指示制御手段(S27,S28)とを備える。そして、第1のスイッチ入力時と第2のスイッチ入力時に取得したデータから補正データを求める(S31)構成とした。
(もっと読む)
携帯電子機器及び地磁気センサ較正方法
【課題】地磁気センサのキャリブレーションに関わる処理を適切なタイミングで実行することができる携帯電子機器と、その地磁気センサ較正方法を提供する。
【解決手段】省電力モードにおいてキー入力部(103)のキーが操作されると、省電力モードが終了するとともに、地磁気センサ(110)の検出値のキャリブレーションに関わる処理が実行される。これにより、ユーザが表示部(107)の画面を見ようとしている状態でキャリブレーションに関わる処理が実行されるため、地平面に対する筐体の角度が適切な状態でキャリブレーション処理を実行し、方位の算出精度を向上することができる。また、ナビゲーションアプリ(方位の算出と表示に関わる処理)の起動中にキャリブレーションに関わる処理を実行することによって、方位の算出と表示を行わない状態で無駄なキャリブレーションを行わないため、消費電力の増大を抑制できる。
(もっと読む)
電子コンパス
【課題】ユーザが行う、携帯端末の回転操作を最小限にしつつ、方位球の中心点を補正することができ、携帯端末の内部磁界による影響を取り除いた、正確な方位を算出できる電子コンパスを提供する。
【解決手段】3軸磁気センサ3により検出された第1検出値P1と、第2検出値P2と、第3検出値P3とを含む円70の中心軸線7を算出するとともに、第1検出値P1と、第2検出値P2と、第3検出値P3とのうちいずれか1個の検出値と、円70を含む平面から外れた位置に存在する第4検出値P4とを繋ぐ直線81の中間点80を通り、該直線81に垂直な垂直二等分面8と、中心軸線7との交点を方位球6の中心点02として算出する。
(もっと読む)
ナビゲーション装置
【課題】方位を変化させる施設に関する情報などを用いずに、方位を正しく算出する。
【解決手段】ナビゲーション装置1は、ナビゲーション処理等を行うメインシステム100と、車両の方位を算出するためのデータを算出するジャイロセンサモジュール200と、車両の振動を検知するショックセンサモジュール300を有する。また、ナビゲーション装置1は、メインシステム100およびジャイロセンサモジュール200に電源を供給する主電源制御スイッチ(主SW)420と、ジャイロセンサモジュール200に電源を供給する副電源制御スイッチ(副SW)430とを有する。ショックセンサモジュール300は、主電源制御スイッチ420がOFFの間に、車両の衝撃を検知すると、副電源制御スイッチ430をONにする。
(もっと読む)
磁気方位センサのキャリブレーション装置、方法およびプログラム
【課題】利用者環境における磁気方位センサの高精度のキャリブレーションを実現する。
【解決手段】キャリブレーション装置は、磁気センサSx,Sy,Szから観測値を収集するセンサ観測値収集部1と、観測値の最大値を検出する最大値検出部2x,2y,2zと、観測値の最小値を検出する最小値検出部3x,3y,3zと、あるセンサを注目センサとして、注目センサが最大値を観測したときの各センサの観測値である第1の観測値と注目センサが最小値を観測したときの各センサの観測値である第2の観測値を求めることを、各センサを注目センサとして実施し、第1、第2の観測値の差から各センサの傾きを計算し、傾きから各センサのゲインを計算する傾きおよびゲイン計算部4と、観測地点の伏角と各センサの傾きとゲインから各センサのオフセットを計算するオフセット計算部5とを備える。
(もっと読む)
地磁気センサの補正データテーブル作成装置及び方法
【課題】地磁気センサの角度出力が自動指向空中線装置の構成及び該装置が装着された機体等が異なったとしても、指向性アンテナの方位制御に際して角度出力の誤差を補正値により迅速に補正可能とする補正データテーブルが作成する。
【解決手段】ヘリコプタに搭載して基地局との画像伝送をするための自動指向空中線装置に組み込まれ、角度出力を得る地磁気センサ10と、地磁気センサを、磁北を基準とした所定角度に回転させる旋回部11と、磁北を基準とした基準角度と地磁気センサの角度出力との誤差を修正するための補正値を記憶する補正値メモリ12と、表示選択部からの選択出力に応じて地磁気センサからの角度出力の補正値を算出し、該補正値による補正データテーブルを補正値メモリ12に作成し、表示選択部に補正値を表示する表示制御角度処理部13とを備えている。
(もっと読む)
電子コンパスおよび電子コンパスの零点誤差を求める方法
本発明は、電子コンパスの零点誤差(Hx0,Hy0)を求める方法に関する。この方法は、3軸磁気センサを用いて電子コンパスの第1座標系における第1磁界強度を測定するステップと、地表面に平行な第2座標系(x,y)における伏角補正された第2磁界強度(200)を第1磁界強度から計算するステップと、伏角補正された第2磁界強度(200)に当てはめ関数(210)を当てはめるステップと、当てはめた当てはめ関数(210)から零点誤差(Hx0,Hy0)を求めるステップとを有する。本発明は、電子コンパスを動作させる方法にも関する。この方法は、磁気センサを用いて測定された第1磁界強度から第2座標系(x,y)における伏角補正された磁界強度(Hx0,Hy0)を計算するステップと、伏角補正された第2磁界強度(Hx0,Hy0)から上述した方法で求めた零点誤差(Hx0,Hy0)を減算することによって零点補正される第3磁界強度(Bx,By)を計算するステップと、南北方向に対して第2座標系(x,y)の軸(x)が偏差する方位角を計算するステップとを有する。 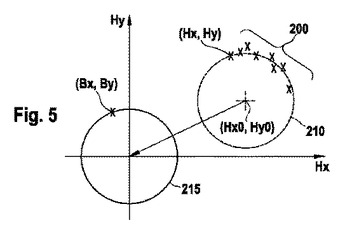 (もっと読む)
(もっと読む)
51 - 60 / 153
[ Back to top ]