
国際特許分類[G01C17/38]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | コンパス;航行もしくは測量のために真北または磁北を探知する装置 (352) | コンパスの試験,較正,または補償 (153)
国際特許分類[G01C17/38]に分類される特許
31 - 40 / 153
磁界検知装置

【課題】 地磁気などの磁気を検知する3軸のセンサを用いた磁界検知装置において、外部磁界などによるオフセットや磁界強度の変化があったときに、演算で基準原点を補正できるようにする。
【解決手段】 3つの磁気センサからの検知出力に基づいて、磁気ベクトルの座標点データが、半径Raの球面座標Ga上の点で求められる。座標点データDx,Dy,Dzが球面座標Gaから大きく離れたときに、2つの座標点データDx,Dyの双方から半径Ra離れた仮想原点I1と、2つの座標点データDy,Dzの双方から半径Ra離れた仮想原点I2を求める。次に半径を少し長くして、仮想原点I3,I4を求める。仮想原点I1,I2の距離d1と仮想原点I3,I4の距離d2を比較し、新たな球面座標Gbの半径Raが基の半径Raよりも長いか短いかを判断する。これを繰り返して、新たな基準原点Obを求める。
(もっと読む)
磁界検知装置

【課題】 地磁気などの磁気を検知する3軸のセンサを用い、磁気ベクトルの回転動作と角速度を、ノイズの影響を低減して精度良く計算できる磁界検知装置を提供する。
【解決手段】 磁気ベクトルを検知する3つの磁気センサからの検知出力に基づいて、磁気ベクトルが球面座標G上の座標点データとして求められる。演算された複数の座標点データD1,D2,D3,D4,・・・の分散と平均を加味して、残差の最も少ない回帰平面Pを求め、この回帰平面Pと球面座標Gとの交線を、移動軌跡円Crであると推定する。移動軌跡円Crの中心からの2つの座標点データの開き角を時間で微分することで、角速度を得ることができる。
(もっと読む)
磁界検知装置
【課題】 地磁気などの磁気を検知する3軸のセンサを用いた磁界検知装置において、外部磁界などによるオフセットを簡単な演算で解消できるようにする。
【解決手段】 3つの磁気センサからの検知出力に基づいて、磁気ベクトルの座標点を演算する。演算された座標点データは基準原点O1を中心とする半径Rの球面座標G1上に現れる。球面座標G1から大きく外れるシフト座標点データDa,Dbが現れたら、シフト座標点データDaを中心とする半径Rの仮想球Gaと、シフト座標点データDaを中心とする半径Rの仮想球Gbを求め、2つの仮想球Ga,Gbの交叉円S上で先の基準原点O1に最も近い点を、オフセット後の新たな基準原点O2とする。
(もっと読む)
磁気センサ制御装置および方法
【課題】オフセットの算出に統計処理を用いる必要のない磁気センサ制御装置を提供する。
【解決手段】3次元磁気センサから順次出力される、3成分を有する複数の磁気データを入力する入力手段と、入力された複数の前記磁気データから、予め決められた4点選抜条件を満たす4つの前記磁気データを選抜する選抜手段と、選抜された4つの前記磁気データを成分とする4点から等距離にある点である中心点を算出する算出手段と、前記中心点の成分を前記磁気データのオフセットとして設定する設定手段と、を備え、前記4点選抜条件は、選抜候補の4つの前記磁気データを成分とする4点を頂点とする四面体の正四面体に対する歪みに相関する条件を含む、磁気センサ制御装置。
(もっと読む)
方位角計測装置、および、方位角計測方法
【課題】 携帯機器に搭載された3軸電子コンパスを特に自動車に設置して使用する場合においても、オフセット磁界の推定精度、および、方位角の計算精度を向上させること。
【解決手段】 測定された地磁気データを、オフセット用フィルタ、方位角用フィルタにそれぞれ導いて補正し、該補正されたオフセット用補正データ、方位角用補正データに基づいて、オフセット磁界の推定と方位角の算出を行う。
(もっと読む)
撮像装置、方位記録方法及びプログラム
【課題】撮像タイミングに対応する短期間で、外乱の影響を排除した正しい撮像方位を算出する。
【解決手段】撮像開始指示に応じて被写体を撮像して撮像画像を出力する撮像部と、地磁気を検出する地磁気センサと、前記撮像開始指示から前記撮像画像の出力までの撮像処理期間に、前記撮像部の構成部品を制御し、前記撮像部の構成部品のうち、前記地磁気センサの検出値に影響を及ぼす磁界発生部品の動作期間を判定する撮像制御部と、前記撮像処理期間のうち前記磁界発生部品の動作期間以外の期間に前記地磁気センサにより検出された検出値に基づいて、撮像方位を算出する方位算出部と、前記撮像方位を前記撮像画像に関連づけて記録媒体に記録する記録部と、を備える、撮像装置が提供される。
(もっと読む)
撮像装置、方位情報処理方法及びプログラム
【課題】撮像装置の姿勢が変化したときでも、ユーザの視点から見て自然な態様でコンパス画像を表示できるとともに、正しい撮像方位を記録することができるようにする。
【解決手段】被写体を撮像して撮像画像を出力する撮像部と、地磁気センサにより検出された地磁気情報と、加速度センサにより検出された加速度情報に基づいて、前記撮像部による撮像方向の方位を算出する方位算出部と、前記加速度情報に基づいて、撮像装置のロール方向の回転角を算出し、前記ロール方向の回転角に基づいて、前記撮像方向の方位を表示用の方位に変換する方位変換部と、前記表示用の方位を表すコンパス画像を、前記撮像画像とともに表示する表示部と、前記撮像方向の方位を表す方位情報を、前記撮像画像に関連づけて記録媒体に記録する記録部と、を備える、撮像装置が提供される。
(もっと読む)
センサ補正プログラム、センサ補正装置およびセンサ補正方法
【課題】地磁気センサとジャイロセンサの検出値に含まれるオフセット誤差を正確に補正すること。
【解決手段】センサ補正装置100は、センサ装置110が検出した検出値を取得すると、まず、移動体130の走行状態から、地磁気センサ111とジャイロセンサ112とのうち、より正確な検出値が出力されるセンサを判断する(ステップS1)。そして、より正確なセンサの検出値を利用して、もう一方のセンサ(ステップS1において、より正確なセンサと判断されなかったセンサ)のセンサの検出値を補正する(ステップS2)。センサ補正装置100は、ステップS2の補正が終了すると、より正確なセンサの検出値と、補正された検出値とを方位検出装置120に出力して(ステップS3)、一連のセンサ補正処理を終了する。
(もっと読む)
モバイル電子デバイスにおける正確な磁気コンパス
本明細書では、ホストデバイスの変化するソフトウェアモードおよびハードウェアモードに部分的に基づく非定常センサ誤差、特に非定常コンパス誤差の較正および補正のための方法および装置について説明する。各モードおよびモードの組合せによってセンサ中に誘導される非定常誤差は、1つまたは複数のホストデバイスの生産前試験中に判断され得る較正において判断される。較正結果はホストデバイスのソフトウェアおよび/またはハードウェアに組み込まれ得る。通常動作中に、アクティブモードまたはモードの組合せに部分的に基づいてセンサ測定値にセンサ補正が適用され得る。 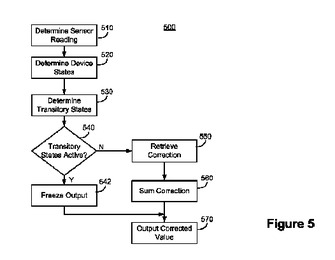 (もっと読む)
(もっと読む)
多次元センサのオフセット、感度、および非直交性の較正
多次元センサ、磁気計、または加速度計が、センサによって提供される生データに基づいて較正される。生データが収集されると、これを使用して2次元センサまたは3次元センサのそれぞれ楕円パラメータまたは楕円体パラメータを生成することができる。例えば決定された楕円パラメータまたは楕円体パラメータなど、生データに基づいてオフセット較正係数が計算される。次いでこのオフセット較正計数および生データに基づいて、感度較正係数が計算される。次いでこの計算されたオフセットおよび感度較正係数に基づいて、非直交性較正係数を計算することができる。オフセット、感度、および非直交性較正係数を使用して生データを補正し、較正されたデータを生成することができる。  (もっと読む)
(もっと読む)
31 - 40 / 153
[ Back to top ]