
国際特許分類[G01C3/06]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 視準線上の距離測定;光学的距離計 (1,749) | 細部 (1,609) | 最終指示値を得るための電気的手段の使用 (1,608)
国際特許分類[G01C3/06]の下位に属する分類
電気的輻射検出器の使用 (5)
国際特許分類[G01C3/06]に分類される特許
1,531 - 1,540 / 1,603
距離画像センサ

【課題】複数個の感光部を組にして対象空間の同方向における距離を求める場合の測定の信頼性を高めた距離画像センサを提供する。
【解決手段】発光源2は対象空間に所定周期の変調信号で変調された光を照射し、光検出素子1は対象空間を撮像する。画像生成部4は、発光源2から対象空間に照射された光と対象空間内の対象物Obで反射され光検出素子1で受光される反射光との変調信号の位相差によって対象物Obまでの距離を求める。光検出素子1に設けた各感光部11は制御回路部3によって対象空間からの光を受光する受光期間が制御される。各感光部11では変調信号の異なる位相に同期した受光期間に受光する。光検出素子1からは変調信号の1周期以上の期間である検出期間ごとに集積した電荷が画像生成部4に与えられ、画像生成部4は、複数の検出期間の電荷量を受光期間別に積算した電荷量を用いて距離を求める。
(もっと読む)
レーザ・パルスを用いて光学リンクを製造する方法と装置
【課題】 本発明は、移動物体の位置を定めるための光学リンクをレーザ・パルスにより製造する方法と装置に関する。
【解決手段】 本発明の特徴とするところは、上記のレーザ・パルスを多少なりとも受信器の方向へ照射し、照射の開始から経過する時間(t)の増加する関数として連続レーザ・パルス(4)のエネルギーを変化させることである。上記のレーザ・パルスの照射の開始は移動物体の発射から遅らせられる。 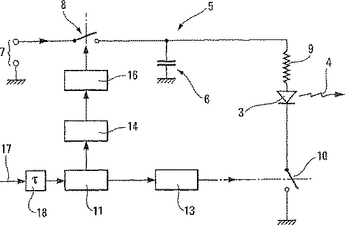 (もっと読む)
(もっと読む)
光パルスを使用した、デジタルカメラにおけるオートフォーカスの実施

【課題】 より改良されたデジタルカメラにおけるオートフォーカスの実施が要求される。
【解決手段】 カメラ(100)は、光パルスを第1のレートで送るように構成された光トランスミッタ(204)と、該光トランスミッタによって送られた前記光パルスに対応するリターン信号を受け取るように構成された光レシーバ(205)と、該光レシーバが受け取った前記リターン信号に対応する電気信号をサンプリングするように構成されたサンプラ(207)であって、前記電気信号を前記第1のレートよりも低い第2のレートでサンプリングするように構成されたサンプラとを備える。
(もっと読む)
測距装置
【課題】パッシブAFの補正データをシュリンクして、メモリ容量を削減してシステムのローコスト化を図る測距装置の提供。
【解決手段】撮影レンズの焦点距離、FNoにより、選択的に測距点を使用し、かつ、それぞれの測距点に応じて、ダーク補正分解能を変える。シェーディング補正は、所定画素の出力を使って、近似式を作成する。所定画素以外の補正データは、補間演算により、補正する。
(もっと読む)
自動車シート上の対象物を検出するための装置
本発明は、対象物の2次元表現を生成するための処理ユニットとカメラを有する、自動車シート上の対象物を検出する装置に関し、装置が少なくとも2つの照明源をさらに有し、当該照明源は、対象物が様々な方向から照明されるように位置決めされ、処理ユニットが、それぞれが様々な照明条件下で生成された2つの2次元表現から対象物の3次元表現を生成するのに適していることを特徴とする。  (もっと読む)
(もっと読む)
物体検出装置
【課題】 演算量を低減する物体検出装置を提供することを課題とする。
【解決手段】 互いに視点の異なる複数の撮像画像を出力する撮像手段と、互いに視点の異なる画像間の対応付けを行う対応付手段とを備え、対応付けによって得られる視差から物体を検出する物体検出装置において、撮像画像を低解像度画像に変換する解像度変換手段と、低解像度画像による対応付けで得られた各対応点の視差が所定の視差以下か否かを判定する判定手段とを備え、高解像度画像による対応付けを行う場合、低解像度画像による対応付けで得られた対応点の位置に対応する高解像度画像の位置の近傍を探索範囲として設定して高解像度画像における対応付けを行い、判定手段により対応点の視差が所定の視差以下と判定した場合、対応点の視差が所定の視差より大きいと判定した場合より探索範囲における視差が少ない方向に対応する範囲を小さく設定することを特徴とする。
(もっと読む)
物体検出装置および方法
【課題】 物体の未検知または、誤検知の発生を低減することのできる物体検出装置を提供する。
【解決手段】 ステレオカメラ101は、撮像された画像をフィードバックすることでレンズ絞りを制御できる複数の撮像装置111、112を備える。3次元情報算出部102は、ステレオカメラ101で撮像された画像から撮像空間の3次元情報を算出する。物体検出部103は、3次元情報算出部102により算出された3次元情報から撮像空間内の物体を検出する。ブルーミング判定部113、123は、ステレオカメラ101で撮像された画像からブルーミングの有無を判定する。画像加工部114、124は、ブルーミング検知部113、123の判定結果により撮像装置111、121に戻す画像を加工する。
(もっと読む)
立体形状測定装置
【課題】三角測量法で高さ測定を行う場合に、測定対象が金属面などの鏡面に近く非常に強い反射光により、PSDおよびその信号処理回路で発生する飽和現象による高さ測定異常を、低減・抑制することのできる、立体形状測定装置を提供する。
【解決手段】反射光8がPSD10上での結像した像11のサイズが高さ測定方向では小さく、走査方向では大きくなるように、受光光学系9のレンズ系を構成することにより、PSD10の飽和発生頻度を低減する。さらには信号処理回路12に、特殊な飽和異常検出回路を設けることにより、飽和発生後の測定高さ異常を抑制することが出来る。
(もっと読む)
光学的変位測定器
【課題】新しい方法により、使いやすい光学的変位測定器を提供することである。
【解決手段】測定対象物8の前方に円錐形状の対物プリズム16が配置される。光源12、コリメートレンズ14により、対物プリズム16の中心光軸30から平行に偏移した往路光40が対物プリズム16を通り、その円錐形状の界面で屈折して測定対象物8に入射される。測定対象物8の表面で反射された光は、対物プリズム16に戻され、その円錐形状の界面で再び曲げられ、往路光40に平行な復路光46となる。中心光軸30からの復路光46のオフセット量は、測定対象物8の変位に応じて変化する。復路光46を集光レンズ18で焦点19に集光し、ピンホール光学素子20で散乱光の影響を抑制して、光位置検出センサ22でオフセット量を検出し、測定対象物8の変位を測定する。
(もっと読む)
物体検出装置
【課題】画像上で複数の物体が接近し又は一部重複している場合でも、各物体を個別且つ安定に識別する。
【解決手段】検出されたトラック70の空間上での位置に基づいて物体位置領域82aを算出する。前時刻に記録された物体位置領域82aに相当するテンプレート80aを呼び出す。テンプレート80aを基準画像Ib上で類似度が最大となる位置に移動させる。物体位置領域82aと移動したテンプレート80aとの重なり割合(R(t-1)∩Rt)を算出する。重なり割合を用いて、過去に検出された物体と同一か否かを判断する。
(もっと読む)
1,531 - 1,540 / 1,603
[ Back to top ]