
国際特許分類[G01C3/06]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 視準線上の距離測定;光学的距離計 (1,749) | 細部 (1,609) | 最終指示値を得るための電気的手段の使用 (1,608)
国際特許分類[G01C3/06]の下位に属する分類
電気的輻射検出器の使用 (5)
国際特許分類[G01C3/06]に分類される特許
1,561 - 1,570 / 1,603
光学式測距センサおよび自走式掃除機

【課題】 騒音が無く、長期安定性が比較的良好で、小型化とコスト削減ができ、しかも、測定精度が比較的高い光学式測距センサを提供すること。
【解決手段】 複数のLED51〜55からの出射光を、1つの発光レンズ1で透過して、被検出物32で反射された反射光を、受光レンズ2を介してPSD4で受光する。LED51〜55からの光出射方向によって被検出物32の方向を検出すると共に、PSD4の受光面における反射光の受光位置に基づいて、被検出物32に対する距離を検出する。焦電型センサ30で遠赤外線L10を受光することにより、被検出物32が人体であるか否かを検知する。1つの受光レンズ1によって複数のLED51〜55の出射光を透過するので、光学式測距センサの小型化とコスト削減を行うことができる。
(もっと読む)
レンジ検査のための測定装置および方法
本発明は、レンジデータの取得および解析を用いて物体(1)の3次元の特性を測定するための画像化装置および方法に関する。画像化装置は、測定開始前に、レンジデータの取得および解析を構成するための手段と、画素を含む少なくとも1つのセンサ(5)を用いて上記の物体(1)の画像からの反射光を検出することによって、上記の物体(1)の画像を作成するための手段と、センサの画素単位で測定された作成画像から上記の物体(1)のレンジデータを取得するための手段と、取得したレンジデータをセンサの画素値から世界座標に較正するための手段と、レンジデータを一様に離隔されたグリッドに再サンプリングすることによって、較正されたレンジデータを矯正するための手段と、較正および矯正の施されたレンジデータを解析して、上記の物体(1)の3次元の特性を得るための手段と、を備える。  (もっと読む)
(もっと読む)
人体検知装置及び衛生洗浄装置

【課題】 本発明の課題は、発光素子の経年劣化に影響を与えることなく発光量を補正する人体検知装置を提供する。
【解決手段】 本発明では、被検出体からの反射光を受光レンズで集光させて受光する一次元位置検出素子と、前記一次元位置検出素子から検出される長手方向の両端より検出する電流比で被検出体までの距離を演算する距離演算手段とを備えた人体検知装置において、前記一次元位置検出素子の両端より検出する総電流量を測定する総電流量検出手段と、前記発光素子の周囲温度を検出する温度検出手段と前記発光素子の駆動電流量を可変する駆動電流設定手段とを有するとともに、前記駆動電流設定手段は、前記距離演算手段と前記総電流量検出手段と前記温度検出手段の出力を参照し、前記発光素子の駆動電流量を可変する。
(もっと読む)
情報装置、情報入力方法およびプログラム
【課題】ユーザの指等の指示物体の動きを迅速に検出して情報を入力することのできる情報装置および情報入力方法およびプログラムを提供する。
【解決手段】指の動きによって非接触に情報が入力される携帯電話装置50であって、絞り1と、絞り1の開口度を調節する絞り調節部4と、指を撮影する撮影部3と、絞り調節部4により開口度を異ならせてそれぞれの開口度において撮影部3で撮影した複数の指画像を比較することにより指が所定の距離範囲内にあるか否かを判定するキー接触検出部11と、指が所定の距離範囲内にあると判定された場合にいずれのキーが操作されたかを判定するキー操作判定部13とを備えた。
(もっと読む)
光波測距装置
【課題】 安価なAD変換器を用いてAM方式光波測距装置を提供すること。
【解決手段】 光波測距装置は、主発振器11、第1PLL回路12、第2PLL回路13、レーザ駆動回路14およびLASER15からなる光源部10と、APD21および増幅器22からなる受光部20と、第1AD変換器31および第2AD変換器32からなるAD変換手段30と、位相差演算回路41からなる位相差検出手段40と、CPU51からなる距離検出手段50で構成されている。主発振器11から発振された基準電気信号が、互いに異なり、かつ択一的に選択される2種の周波数f1、f2を有し、サンプリング信号が、基準電気信号に対してn回に一度同期し、かつ、サンプリング信号の周波数fSが、基準電気信号の2種の周波数f1、f2に対して平均値を成し、AD変換手段が、サンプリング信号に基づいて、基準電気信号の一周期につき少なくとも一回のAD変換を行なう。
(もっと読む)
サインに基づく人間−機械相互作用
コミュニケーションは、人間−ロボット相互作用における重要な問題である。サインは、ユーザの命令又はコマンドを提供することにより機械との相互作用に用いられる。本発明の一実施形態は、人間の検出、人間のボディパーツ検出、手形状分析、軌道分析、向き決定、ジェスチャマッチング等を含む。形状及びジェスチャの多くの型が、コンピュータビジョンに基づく煩わしくない様式で認識される。多くのアプリケーションが、家電の遠隔制御、コンピュータ制御装置のマウスレス(及びタッチレス)操作、ゲーミング及び他方に命令を与えるための人間−ロボットコミュニケーションを含むこのサイン理解技術により実現可能となる。動的な検出ハードウェアが、ビデオレートでの深度画像のストリームを取得するために用いられ、深度画像のストリームは、情報抽出のために順次分析される。 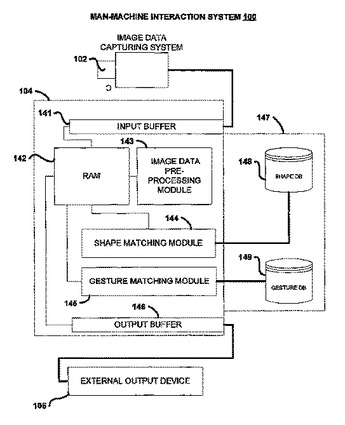 (もっと読む)
(もっと読む)
目標捕捉装置
多重反射のビーム成分を意図的に減衰させる。減衰フィルタ(18,19)を受信器(2)の前に及び送信器(1)の後にそれぞれ設ける。ビーム成分の強度の減衰は、ファクターで0.7、少なくとも0.5または0.3となる。別の方法または追加的に、ミラー(10)または立方体プリズム(14)の偏向手段を用いてビームを減衰させることができる。多重反射するビーム成分は、減衰手段を少なくとも2回通過する。従って、通常のビーム成分に比べて、一層減衰される。さらに受信器(2)の入力表面(5)は、円錐の偏向表面で囲まれている。この偏向表面は、そこに入射する光を吸収し、残部を入力方向以外の方向に反射して、多重反射を生じさせない。  (もっと読む)
(もっと読む)
移動制御システム
本発明は、車両またはロボットアームなど移動プラットフォームの制御に使用できる移動制御システムに関する。本発明は特に車両用の運転支援、車両用のセルフパーキング支援システムに利用できる。3次元カメラ(12)がプラットフォーム、例えば車(102)上に置かれ、プラットフォームまわりの環境を撮像する(114)ように配置される。プロセッサ(7)が3次元情報を用いて環境モデルを生成し、このモデルを利用して移動制御信号を生成する。好ましくは、プラットフォームは環境に対して移動し、様々な位置からの環境の複数の画像を取得する。 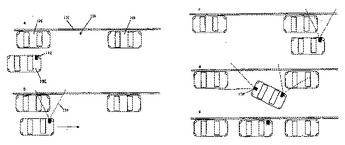 (もっと読む)
(もっと読む)
光学測定ヘッド
本発明に従う測定ヘッド(4)は、好ましくは回折レンズであるゾーンレンズ(26)と半球レンズ(23)又はGRINレンズ(33)の組み合わせを有する。これは、高い開口数を有する非常に細い測定ヘッド(4)になる小型化の可能なコンセプトを表し、従って、ベストな解像能力をもたらす。このような測定ヘッドは、測定ヘッドの測定すべき表面への指向に関する角度誤差又は測定ヘッドの光軸に対する面の斜めの位置決めに対して反応しない。  (もっと読む)
(もっと読む)
オブジェクト検出方法、オブジェクト検出装置、およびオブジェクト検出プログラム
本発明の利点は、オブジェクトを適切に検出することである。本発明におけるオブジェクト検出装置は、オブジェクトまでの距離を決定する複数のカメラと、距離を決定する距離決定部と、ピクセルの距離に対するピクセル度数を特定するヒストグラム生成部と、最もありそうな距離を決定するオブジェクト距離決定部と、距離の差に基づくピクセルの確率を提供する確率マッピング部と、ピクセルのグループとしてカーネル領域を決定するカーネル検出部と、カーネル領域の近傍にあるピクセルから選択したピクセルのグループとして縁領域を決定する縁検出部と、オブジェクトが所定の確率で現れるオブジェクト領域を特定するオブジェクト特定部と、を有する。  (もっと読む)
(もっと読む)
1,561 - 1,570 / 1,603
[ Back to top ]