
国際特許分類[G01C3/06]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 視準線上の距離測定;光学的距離計 (1,749) | 細部 (1,609) | 最終指示値を得るための電気的手段の使用 (1,608)
国際特許分類[G01C3/06]の下位に属する分類
電気的輻射検出器の使用 (5)
国際特許分類[G01C3/06]に分類される特許
1,571 - 1,580 / 1,603
深度情報を含む画像の生成方法と装置
深度情報を含む画像を生成する方法と装置が提供される。この方法では、場面から発する放射を検出し、異なる面における場面の少なくとも2つの画像を形成する。各画像は強度データ値のセットを有する。データ値の変動が得られ、強度分散の2つのセットがデータ値から得られ、強度分散データは深度情報を得るために処理される。深度情報は、画像データにおける異なる深度情報を識別するためにコード化される。
 (もっと読む)
(もっと読む)
位置判定及びモーショントラッキング
プロセッサベースのシステム(301)において使用される位置判定及びモーショントラッキングのためのシステム及び方法。実施形態は、固定点(132)を中心として少なくとも1つの方向に動く方向転換器(130)と、サーチビーム(131)を位置ビーム(141)として反射する対象物(101)と、方向転換器の向きから少なくとも1つの角度位置を判定する論理回路(160)と、固定点(132)からの対象物の距離(104)を判定する論理回路(161)とを含む場合がある。  (もっと読む)
(もっと読む)
単一チップの赤、緑、青、距離(RGB−Z)センサー
RGB−Zセンサーは単一のICチップ上に実施可能である。ホットミラーなどのビームスプリッタが、対象物から入射する第一及び第二のスペクトルバンド光エネルギーを受信し、好ましくはRGBであるイメージ成分及び好ましくはNIRZである成分に分離する。RGBイメージとZ成分は、それぞれイメージデータとZデータを出力するRGBピクセル検出器及びNIRピクセル検出器のアレイ領域によってそれぞれ検出される。これらの領域のピクセルサイズ及びアレイ解像度は同一である必要はなく、またこれら両方のアレイ領域を共通のICチップ上に形成しても良い。対象物の認識を容易にするために、イメージデータを用いたディスプレイはZデータによって補助できる。その結果得られる構成は、ビームスプリットを行なうことによる光学的効率性と単一のICチップに実施することによる簡素性とを組み合わせたものとなる。この単一チップの赤、緑、青、距離(RGB−Z)センサーの使用方法も開示されている。  (もっと読む)
(もっと読む)
単一チップの赤、緑、青、距離(RGB−Z)センサー
RGB−Zセンサーは単一のICチップ上に実施可能である。ホットミラーなどのビームスプリッタが、対象物から入射する第一及び第二のスペクトルバンド光エネルギーを受信し、好ましくはRGBであるイメージ成分及び好ましくはNIRZである成分に分離する。RGBイメージとZ成分は、それぞれイメージデータとZデータを出力するRGBピクセル検出器及びNIRピクセル検出器のアレイ領域によってそれぞれ検出される。これらの領域のピクセルサイズ及びアレイ解像度は同一である必要はなく、またこれら両方のアレイ領域を共通のICチップ上に形成しても良い。対象物の認識を容易にするために、イメージデータを用いたディスプレイはZデータによって補助できる。その結果得られる構成は、ビームスプリットを行なうことによる光学的効率性と単一のICチップに実施することによる簡素性とを組み合わせたものとなる。この単一チップの赤、緑、青、距離(RGB−Z)センサーの使用方法も開示されている。
(もっと読む)
表面の形状を測定する装置および方法
本発明は、床などの硬質または半硬質基板上で用いるための表面形状測定装置を提供する。本装置は、(a)ビームと、(b)ビームに装着される少なくとも1つのビームサポートと、(c)該ビームに摺動可能に接続され、かつ表面までの距離を測定するように構成されるセンサアセンブリと、(d)該ビームに沿って該センサアセンブリの位置を測定するように構成される変換器アセンブリとを含む。  (もっと読む)
(もっと読む)
近接度検出器
光源(1)と、光源(1)により照明されるときに基準物から生じる後方散乱光を受光するための光検出器(3)とを備え、光検出器(3)への後方散乱される光の強度を近接度の尺度として利用することにより、第1の物体(目標物)と第2の物体(基準物)との間の近接度を検出するための装置に関する。目標物(2)は、焦点面(7)を有し光源(1)により照明される光学デバイス(4)を含む。光源(1)からの光線の軸と光検出器(3)への後方散乱による光線の軸とは互いに非常に接近し、ほぼ平行又は一致する部分を有する。近接度は目標物(2)と、ほぼ焦点面に位置する基準物(6,8)との間の間隔(相対位置)に相当する。  (もっと読む)
(もっと読む)
距離算出装置および算出プログラム
移動物体と対象物との間の方位角や、速度、ヨーレートなどの各種の状態量に基づいて、移動物体と対象物との間の距離を正確に算出することを目的とする。算出装置1は、移動物体と対象物との間の方位角を算出する手段2と、2つの時点間の移動物体の移動距離を算出する手段3と、移動方向の角度変化量を算出する手段4と、手段2、手段3、手段4の出力を用いて移動物体から対象物までの直線距離を算出する手段5とを備える。 (もっと読む)
物体までの距離の測定
本発明は、第1カメラ(1)が可視スペクトル域に感応し、第2カメラ(2)が赤外線スペクトル域に感応する2つのカメラ(1;2)を有する装置に関する。カメラ(1;2)は、少なくとも1つの物体(4)を含む同一の場面(3)の像を撮像するために相互に所定の間隔(a)をおいて配置される。装置は、さらに、所定の間隔(a)と2つのカメラ(1;2)によって撮像される像とに基づいてカメラ(1;2)からの物体(4)の距離を計算する三角測量装置(7)を備えている。  (もっと読む)
(もっと読む)
3次元距離測定用の光電子センサおよびデバイス
本発明は変調された光子束(50)を復調する光電子センサ、および少なくとも1つのそのような光電子センサを備えた特に3次元距離測定用の測定デバイスに関する。本発明の光電子センサは、半導体領域(10)内に組み込まれ、例えば、半導体領域内で拡散され、半導体領域(10)と逆にドープされた少なくとも2つの収集領域(20、22)を備える。前記収集領域(20、22)を用いて変調された光子電流(50)の進入によって生じる少数担体が収集かつタップされる。さらに少なくとも2つの制御領域(32、34)が半導体領域(10)内に組み込まれ、前記制御領域は制御領域(32、34)に印加することのできる制御電圧に従ってドリフト領域を生成する。前記制御領域(32、34)は半導体領域(10)と同様にドープされている。
 (もっと読む)
(もっと読む)
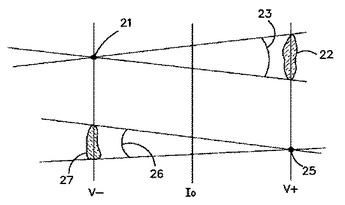
位置検出デバイス
n個のセグメントと、光検出要素アレイのセグメントからの出力値(OV)を比較することによって、最大強度を有するセグメントを識別するように構成されるパラレル算術処理部とを有する光検出要素アレイを備える位置検出デバイス。パラレル算術処理部は、最大強度を有するセグメントが選択されるまでセグメントを順に選択/除外するように構成される少なくとも1つの比較段を備え、第1段は、入力セグメント(IS)としてそれぞれの光検出要素セグメントから出力値OVを受け取り、追加段は、入力セグメントISとして先行する段から出力値OVを受け取る。その位置検出デバイスを備えるレンジファインダもまた提供される。 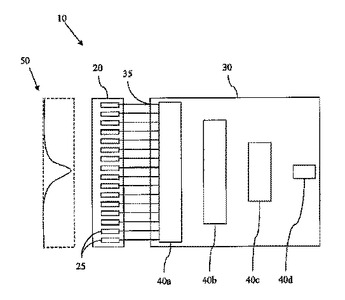 (もっと読む)
(もっと読む)
1,571 - 1,580 / 1,603
[ Back to top ]