
国際特許分類[G01C3/06]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 視準線上の距離測定;光学的距離計 (1,749) | 細部 (1,609) | 最終指示値を得るための電気的手段の使用 (1,608)
国際特許分類[G01C3/06]の下位に属する分類
電気的輻射検出器の使用 (5)
国際特許分類[G01C3/06]に分類される特許
971 - 980 / 1,603
交通手段用の運転警報システム
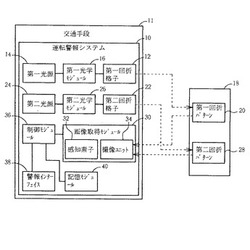
【課題】交通手段と物体間の相対位置と距離を判断する運転警報システムを提供する。
【解決手段】システムは、第一回折格子と、光を第一回折格子に投射し、第一回折パターンを物体に形成する第一光源と、第一回折パターンを取り込む画像取得モジュールと、画像取得モジュールに電気的に接続され、画像取得モジュールに取り込まれた第一回折パターンに基づいて、交通手段と物体の相対位置を判断する制御モジュールとを含む。
(もっと読む)
撮像システム

【課題】複数の撮像ユニットを第1の筐体と第2の筐体とで被装してなる撮像システムにおいて、複数の撮像ユニットの相対位置精度を簡単な構造で確保でき、複数の撮像ユニットの相対位置精度の維持が可能な撮像システムを提供する。
【解決手段】複数の撮像ユニットを、第1の筐体に設けた開口に嵌装して第1の筐体に配置する。
(もっと読む)
積雪量計測装置及び方法
【課題】滑らかな積雪面の位置を計測するステレオ画像計測装置及び方法を提供する。
【解決手段】ランダムドットパターン4を積雪面5に投影し、該積雪面5が撮像された画像を撮像装置(例えば、カメラ)群1によって取得し、該画像に係る対応点を検出してステレオ画像計測を施して、該積雪面5の位置に係る三次元座標を取得する。
(もっと読む)
計測装置およびその計測方法
【課題】被検物の全体3次元形状を測定する計測装置、およびその計測方法を提供することを目的とする。
【解決手段】本発明に係る計測装置1は、被検物170を載置する支持ステージ151と、支持ステージ上に載置された被検物の3次元形状を光学的手法を用いて非接触で測定する測定部2とを備えており、測定部は支持ステージに対して測定方向が可変となるように構成され、また、予め設定した所定の位置関係で支持ステージ上に載置された少なくとも3つ以上の測定基準体160、161および162と、測定部により複数の測定方向から支持ステージ上に載置された測定基準体および被検物を測定し、得られた測定データから測定基準体の測定位置を合成基準として複数の測定方向からの被検物の測定データを合成することにより、被検物の全体3次元形状を求める合成部とを有している。
(もっと読む)
自動写真作成装置および自動写真作成方法
【課題】クロマキー合成の手法を使用することなく、撮影画像に対して所望の付加画像を背景や前景等として合成することができる自動写真作成装置を提供する。
【解決手段】この自動写真作成装置における撮影室2の背面にはクロマキー合成のための色が付されておらず、カメラ10により撮影された撮影画像に対して、レーザスキャナ30により計測された利用者の距離(3次元位置)に基づき画像マスクが生成される。
すなわち、本体部4の主制御装置は撮影画像に含まれる画素のうち(上記背面までの距離に相当する)所定距離以上の撮影対象に対応する画素を背景とする画素マスクを生成し、このマスクを適用した撮影画像に付加画像を合成することにより、クロマキー合成の手法を使用することなく、所望の付加画像を背景や前景等として合成することができる。
(もっと読む)
形状測定装置
【課題】被検物の表面形状を短時間で精度よく測定可能な形状測定装置を提供する。
【解決手段】波長に応じた透過率で光を透過する媒質60中で被検物90を保持する保持部55と、保持部55に保持された被検物90に所定波長の照明光を媒質60中を通過させて照射する照明部10と、照明部10により照明光を照射された被検物90から媒質60中を通過して戻ってくる反射光を受けて被検物90の像を撮像する撮像部20,30と、撮像部20,30で撮像された像の光強度および媒質60の透過率に基づき、被検物90の表面90aの光軸方向における距離を求め、被検物90の表面90aの三次元形状を測定する測定部40と、を有して構成されている。
(もっと読む)
計測装置
【課題】計測部分を目視で確認できる計測装置を提供することを目的とする。
【解決手段】本発明に係る計測装置は、プローブ光23を被検物200に向けて走査して照射させる主走査ミラー130および副走査ミラー140と、被検物によって反射された反射プローブ光30とプローブ光との位相差から、被検物の走査領域の立体形状を表す三次元座標を測定する測定手段とを有して構成されている。さらに、この計測装置は、可視光領域の波長を有したマーカー光24を発射するマーカー光源110と、マーカー光を反射するとともにプローブ光を透過するダイクロイックミラー120とを備えており、これらにより、プローブ光とダイクロイックミラーにおいて反射されたマーカー光とを、同一光路上に重ねた状態で走査して被検物に照射する。
(もっと読む)
障害物検知装置
【課題】 狭い通路等を低速で通過する際に自車が接触する可能性のある障害物を簡単な演算で確実に検知し得る障害物検知装置を提供する。
【解決手段】 車両の側面に設けられたテレビカメラ12が少なくとも車両の側方から斜め前方を含む領域を撮像し、特徴部抽出手段M1がその画像から特徴部を抽出し、積算手段M2が前記特徴部の所定時間間隔毎の変化分を積算して積算画像を作成し、収縮/膨張処理手段M3が前記積算画像を収縮/膨張処理することで路面上の図形の積算画像を消去して立体物の積算画像を残し、障害物認識手段M4が前記残った立体物の積算画像から障害物を認識するので、テレビカメラ12の画像データに簡単な演算を施すだけで障害物となる立体物を確実に検知することができる。
(もっと読む)
対象物取出装置
【課題】曲面形状を有するワークを、実用的な時間で検出して、取出す。
【解決手段】少なくとも一部に曲面的な形状を有する対象物を取出すためのロボットを含む対象物取出装置が、対象物の濃淡勾配分布モデルを記憶する記憶手段と、対象物の濃淡画像を撮像する撮像手段と、撮像手段により撮像された濃淡画像から濃淡勾配分布を抽出する勾配抽出手段と、勾配抽出手段により抽出された濃淡勾配分布と記憶手段により記憶された濃淡勾配分布モデルとに基づいて、濃淡画像における対象物の位置または位置姿勢を検出する対象物検出手段と、対象物検出手段により検出された位置または位置姿勢の情報をロボットに関する座標系における位置または位置姿勢の情報に変換する検出情報変換手段と、検出情報変換手段によって変換された位置または位置姿勢にロボットを移動させて対象物を取出すロボット移動手段と、を含む。
(もっと読む)
カメラ
【課題】構造が簡単なカメラを提供すること。
【解決手段】少なくとも2つの孔を有し、孔の配置は、孔それぞれの中心が水平方向の同一直線上になく、前記孔それぞれの中心が鉛直方向の同一直線上にない配置である遮断板528と、孔のそれぞれに対して、長手方向の発光面の一部が孔の対面に配置され、互いが平行に近い状態で設置される少なくとも2つのストロボ発光管529、530と、所定時間内において、ストロボ発光管のいずれか一方のみが発光する制御を行う光源制御手段534と、ストロボ発光管から照射される照射光による撮像データの光強度比とストロボ発光管から照射される照射光の角度との関係を用いて、撮像データの奥行き値を求める距離計算部535と、を具備し、ストロボ発光管は、その一端が孔と対面し、他端が遮断板528の遮断部分と対向している、カメラである。
(もっと読む)
971 - 980 / 1,603
[ Back to top ]