
国際特許分類[G01C3/06]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 視準線上の距離測定;光学的距離計 (1,749) | 細部 (1,609) | 最終指示値を得るための電気的手段の使用 (1,608)
国際特許分類[G01C3/06]の下位に属する分類
電気的輻射検出器の使用 (5)
国際特許分類[G01C3/06]に分類される特許
1,011 - 1,020 / 1,603
赤外線撮像・レーザ測距装置
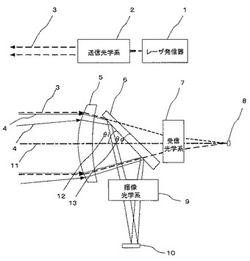
【課題】赤外線撮像用光学系及びレーザ測距用受信光学系の二つの光学系の対物レンズを共用化しても、収差が発生しなく、結像性能が低下することのない赤外線撮像・レーザ測距装置を得る。
【解決手段】赤外線撮像用光学系及びレーザ測距用受信光学系の二つの光学系の対物レンズを共用する赤外線撮像・レーザ測距装置であって、前記対物レンズとして、片面または両面に回折面を有する対物回折レンズ5を用いると共に、前記対物回折レンズ5の後方に配置され、撮像用の赤外線を反射し、測距用のレーザ光を透過するダイクロイックミラー6を備える。
(もっと読む)
距離画像生成装置、距離画像生成方法及びプログラム

【課題】高精度かつ高速に距離画像を生成することのできる距離画像生成装置、距離画像生成方法及びプログラムを提供する。
【解決手段】基準画像と参照画像とを取得する撮像装置2a,2bと、基準画像及び参照画像について解像度の異なる複数の階層画像を生成する多重解像度画像生成部13と、少なくとも最低解像度の階層画像に対して対応点探索を行うSAD演算部6と、少なくとも最高解像度の階層画像に対して対応点探索を行うPOC演算部7を備え、低解像度の階層画像から対応点探索を開始し、順次解像度の高い階層画像について対応点探索を行い、最高解像度の階層画像に至るまで順に対応点探索を繰り返す対応点探索部15と、直前の階層についての探索結果に基づいて次の階層の階層画像の探索領域を設定する探索領域設定部14と、探索結果に基づいて距離画像を生成する距離画像生成部16とを備えている。
(もっと読む)
人数計測システム
【課題】建屋内もしくは室内に滞留する人数を計測する。
【解決手段】人物検出手段は人の出入りする場所の上方に設けられた複数台のカメラからなる撮像手段からの画像データにより距離情報を得るから、床上の影の距離情報と人物の距離情報とから区別して人物を検出することができ、人物計数手段は検出された人物について移動を追跡し、移動方向を検出してその人数を計数し、滞留人数計数手段において正確に滞留人数を計数することかできる。
(もっと読む)
合焦位置を決定する方法及びビジョン検査システム
本発明は、試料位置と合焦位置との間の差分を求める方法及びビジョン検査システムに関する。第一のステップにおいて、試料を示す画像データが獲得される。次に、該画像データから特徴セットが抽出される。その後、画像データ特徴を位置差分値に関連付けるように教え込まれた機械学習アルゴリズムを用いることにより、該特徴セットは試料位置と合焦位置との間の差分に対応する位置差分値に分類される。  (もっと読む)
(もっと読む)
測距装置及び測距方法
【課題】ノイズの影響を受けにくく、撮像素子を駆動するための回路も簡単にすることができ、CPUへの負荷を低減することができる測距装置を提供する。
【解決手段】発光部26と、発光部26から出射される光を強度変調して第1変調光12A〜第4変調光12Dとして出射させる発光制御部28と、第1変調光12A〜第4変調光12Dの基準時から照射開始時までの時間的長さを制御する開始時間制御部64とを有する発光手段14と、第1変調光12A〜第4変調光12Dにより照射された被検出物16からの反射光18を受光する受光手段20と、第1変調光12A〜第4変調光12Dと反射光18の位相差から被検出物16までの距離を算出する演算手段22とを有する。受光手段20は、照射開始時を基準として一定周期ごとに設定された露光期間において反射光18の光量をサンプリングする。
(もっと読む)
距離画像センサ
【課題】対象空間の各領域ごとの受光光量を適正化し、物体の遠近や反射率にかかわらず距離を計測することができる距離画像センサを提供する。
【解決手段】対象空間に光を照射する発光源2と、対象空間からの光を受光して受光光量に応じた電荷を生成する複数個の感光部11を有し対象空間を撮像する光検出素子1とが設けられる。距離計測期間において、発光源2は所定周期の強度変調光を対象空間に照射し、画像生成部3は各感光部11で生成された電荷を用いて距離画像を生成する。フィルタ要素6は、各感光部11に対象空間から入射する光の透過率を個別に調節可能であり、距離計測期間には透過率を一定に保つ。画像生成部3は、距離計測期間の前に設定した環境計測期間において発光源2から対象空間に光を照射させ、各感光部11で得られた電荷量の差が小さくなる方向に各感光部11に対応する領域の透過率を調節する。
(もっと読む)
カメラ
【課題】実空間上における被写体までの距離、および被写体間の距離を算出すること。
【解決手段】距離算出部104cは、画像取得手段104aから撮影画像を読み込んで、撮影画像内に含まれる識別標識を認識する。そして、認識した識別標識の実空間上におけるカメラからの距離、および認識手段によって複数の識別標識が認識された場合には、実空間上における各識別標識間の距離を距離情報として算出する。
(もっと読む)
相関演算装置、相関演算方法及びプログラム
【課題】複数の画像から対象物の3次元位置情報を得る場合に、高精度かつ高速に処理を行うことのできる相関演算装置、相関演算方法及びプログラムを提供する。
【解決手段】基準画像と参照画像とを取得する画像取得部2と、基準画像及び参照画像について解像度の異なる複数の階層画像を生成する多重解像度画像生成部3と、基準画像と参照画像との視差値に基づいて距離値を算出するSAD演算部5と、階層画像の中から、距離値に基づいて対応点の探索を開始するのに最適な解像度の階層画像を選択する画像選択部7と、画像選択部7により選択された階層画像から対応点の探索を開始し、当該階層画像についての探索が終了すると当該階層画像についての探索結果を次の探索に反映させながら順次解像度の高い階層画像について対応点の探索を行い、最高解像度の階層画像に至るまで順に対応点の探索を繰り返すPOC演算部8とを備えている。
(もっと読む)
位置判定装置
【課題】本発明は、従来法では計測が困難であった裏面反射が生じる計測対象についても高い精度で位置判定が可能な位置判定装置を得ることを課題とするものである。
【解決手段】計測対象物表面に対向する対物レンズと、該対物レンズを通して照明光を前記所定位置に集光する照明装置と、該対物レンズ光軸と光学的に等価な軸上に設置され計測対象物によって反射しさらに対物レンズを照明光とは逆方向に透過したビームを集光する集光レンズと、該集光レンズの後焦点面上において光軸上もしくは光軸直近を通る直線を境界として後焦平面の半分を遮蔽する遮光板と、該遮光板の光進行方向に置かれかつ到達した光の強度の分布から強度中心位置を算出する光検出器とを備えた位置判定装置において、前記対物レンズと前記遮光板の中間の光軸上の少なくとも1箇所に光軸を略対称軸とする領域を通り前記光検出器に至るビームの中央部を遮蔽する中間遮光板を配置する。
(もっと読む)
キャリブレーション方法及び装置、並びに自動検知装置
【課題】例えば車両のカメラである、撮像手段の設置俯角を導出するためのキャリブレーション方法において、比較的簡単に、撮像手段の設置俯角を導出する。
【解決手段】キャリブレーション方法は、撮像手段(300)により撮像可能な範囲に収まるように且つターゲット面上に配列された複数のターゲット(111、112、121、122)を夫々含むと共に、撮像手段からターゲット面までの距離が相異なるように夫々配置された複数のターゲット郡を用いて、撮像手段の設置俯角を導出する。キャリブレーション方法は、撮像手段の光軸と前記ターゲット面との交点の、少なくとも前記ターゲット面に沿った一方向についての位置を取得する交点取得工程と、取得された交点の位置と複数のターゲット郡間における前記ターゲット面の相対位置とに基づいて、設置俯角を取得する設置俯角取得工程とを備える。
(もっと読む)
1,011 - 1,020 / 1,603
[ Back to top ]