
国際特許分類[G01L5/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 力,応力,トルク,仕事,機械的動力,機械的効率,または流体圧力の測定 (8,098) | 特定の目的に適合した,力,例.衝撃によるもの,仕事,機械的動力またはトルクを測定する装置または方法 (2,038)
国際特許分類[G01L5/00]の下位に属する分類
スキーのセーフティビンディングの解放力を測定するもの
ロープ,ケーブル,線条,糸,帯,または同様の可撓性部材の張力を測定するもの (130)
回転軸の軸方向押力を測定するもの,例.推進装置におけるもの (19)
乗物のけん引力または推進力を測定するもの (7)
爆発力を測定するもの;発射体のエネルギーを測定するもの
力の複数分力を測定するもの (304)
力の比を測定するもの
車輪の側圧を測定するもの (16)
制御部材,例.乗物の制御部材,引き金,に加えられる力を測定するもの (60)
ナットまたは類似応力が加わるその他の部材を締め付けるトルクまたはねじりモーメントの値を測定するもの (20)
単位時間当りの回転数に関連したトルク特性を測定するもの
ブレーキを試験するもの (36)
国際特許分類[G01L5/00]に分類される特許
1 - 10 / 1,446
エナメル線の凸状欠陥部の検出方法、エナメル線の凸状欠陥部検出装置、及びエナメル線の凸状欠陥部検出システム
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
センサ付車輪用軸受装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
検出装置、電子機器及びロボット
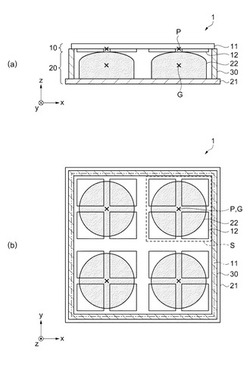
【課題】外力を高い精度で検出する検出装置を提供する事。
【解決手段】外力を検出する検出装置1は、基準点Pの周りに圧力センサー12を複数個配置した第一基板10と、突起22を有する第二基板20と、を備える。第一基板10は可撓性を有する。突起は22、基準点Pと重なる位置に重心Gが位置し、先端部が圧力センサー12に当接する様に配置されている。第一基板10が外力に応じて変形するので、外力の大きさと方向とを高い精度で検出する検出装置1を提供する事ができる。
(もっと読む)
座席装置

【課題】 誤検知を低減し得る座席装置を提案する。
【解決手段】 本発明の座席装置1は、クッションパッド8及び当該クッションパッド8の座面から加えられる荷重を検知する少なくとも1つの感圧スイッチSW1を有する着座センサ7を備える。このクッションパッド8の下面には、感圧スイッチの上方を含む位置に凹部61,62が形成され、着座センサ7は、凹部62の底よりも下方に配置され、感圧スイッチSW1の上方にあたる凹部62の底部分と着座センサ7との間には間隙GPが形成され、感圧スイッチの上方にあたる凹部62の底部分以外のクッションパッド8の下面の少なくとも一部に着座センサ7が直接的又は間接的に固定される。
(もっと読む)
圧力センサ、情報処理装置、及び電極決定方法
【課題】歩行補助装置の装着者の足のサイズの個人差に依存せず、足裏の着床と離床の状態を明確に感知することが可能な圧力センサ、情報処理装置、及び電極決定方法を提供する。
【解決手段】本発明は、第1の電極と複数の第2の電極が設けられた電極シートと、圧力により面抵抗が変化する感圧シートと、を備え、前記感圧シートの一方の面と、前記電極シートの一方の面とが重なり合って構成され、人の足裏と地面との間に装着される圧力センサである。そして、この圧力センサにおいて、前記第1の電極と複数の第2の電極は、それぞれ前記電極シートの前記面上の互いに異なる位置に設けられ、且つ、前記感圧シートの前記面であって前記第1の電極と前記第2の電極との間に位置する前記面を含む領域の抵抗に応じた電圧を前記第2の電極ごとに測定する情報処理装置へ電気的に接続するための導線がそれぞれの前記電極から引き出されている。
(もっと読む)
外力検知装置、ロボット制御システム及び外力検知方法
【課題】 力覚センサーの先に設けられた機械機構により外力が変調される場合に、精度の高い外力検知を行う外力検知装置、ロボット制御システム及び外力検知方法等を提供すること。
【解決手段】 外力検知装置30は、力覚センサー10から出力されたセンサー情報を取得する取得部32と、取得したセンサー情報に対して補正処理を行う補正部34とを含み、力覚センサー10には、外力fを変換して力Fとして力覚センサー10に伝達する機械機構(ハンド110等)が設けられ、補正部34は機械機構での変換の逆変換を補正処理として行う。
(もっと読む)
空気入りタイヤ
【課題】歪測定精度の低下や、歪センサのセンサ取付け穴からの脱落を抑制できる。
【解決手段】サイドウォール表面をなすサイドウォールゴム3Gの外面3sで開口する有底のセンサ取付け穴11が凹設されたタイヤ本体10、及び、センサ取付け穴11に挿入された歪センサ12を具えた空気入りタイヤ1である。センサ取付け穴11には、歪センサ12の前面12bの少なくとも一部を覆って、該歪センサ12を抜け止めする覆い部20が設けられる。
(もっと読む)
ボルト締付け軸力推定装置およびボルト締付け軸力推定方法
【課題】一旦締結したボルトを緩めることなく、ボルトの締付け軸力を推定することができるボルト締付け軸力推定装置を提供する。
【解決手段】軸力推定装置1は、ボルトBを締付けるための締付け手段2と、締付け手段2に取り付けられたトルク検出手段3および角度検出手段4と、情報処理手段5とを備えている。情報処理手段5は、締付けトルクを回転角度で積分することによって算出されるトルク積分値と、締付け軸力とを予め関連付けた軸力情報を記憶する記憶部61と、トルク検出手段3にて検出された締付けトルクを、角度検出手段4にて検出された回転角度で積分することによって、トルク積分値を算出する算出部64と、記憶部61に記憶された軸力情報と、算出部64にて算出されたトルク積分値とに基づいて、ボルトBの締付け軸力を推定する推定部65とを備えている。
(もっと読む)
力検出器、検出装置、電子機器及びロボット
【課題】計測分解能が高く、計測感度が良い力検出器を提供する事。
【解決手段】検出面に加えられた力を検出する力検出器は、第一電極配線211と、第二電極配線212と、複数個の圧力センサー12とを備える。圧力センサー12は第一電極配線211と第二電極配線212との交点に設けられ、第二電極配線212は第一電極配線211よりも検出面側に配置される。第二電極配線212は圧力センサー12の外の領域で、屈曲又は湾曲する箇所を有している。こうする事で、一つの圧力センサー12に加えられた力が第二電極配線212を経由して隣の圧力センサー12に伝播する事を抑制でき、検出面に加えられた力を正確に測定する事ができる。
(もっと読む)
複数リンク型重機に於ける反力荷重推定方法及び装置
【課題】複数リンク型重機において、対象物より受ける反力荷重を正確に且つ確実に推定する方法及び装置を提供する。
【解決手段】相対的に枢動可能に直列的に連結された複数のリンクを有し、複数のリンクは重機本体20に枢支された基幹リンク26と対象物に必要な作用を行う先端リンク30とを含む複数リンク型重機10が対象物より先端リンクの作用点にて受ける反力荷重を推定する方法及び装置であって、各リンクについて作用点に作用する反力荷重を求めるためのラグランジェの運動方程式を導出し、各リンクの回転角を検出すると共に、各リンクの重機本体側の枢軸線の周りのトルクを推定し、これらに基づいてラグランジェの運動方程式を解くことにより反力荷重を演算し、反力荷重に基づいて先端リンクが作用点にて対象物より受ける反力荷重を演算する。
(もっと読む)
1 - 10 / 1,446
[ Back to top ]