
国際特許分類[G01S1/70]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 非指向性受信機により探知でき,かつビーコン送信機に関連して定められる方向,位置,または位置線を測定できる,1または複数の特性をもつ信号を送信するビーコンまたはビーコン方式;それと協働する受信機 (201) | 電波以外の電磁波を用いるもの (102)
国際特許分類[G01S1/70]に分類される特許
11 - 20 / 102
紫外線放射光線を用いた捜索および救援
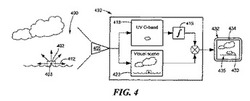
捜索および救援システムは、放射光線を放出する放射光線源を含む救援ビーコンを含む。放射光線の少なくとも一部は、紫外線c−帯域放射光線を含む。また、本システムは、救援ビーコンを突き止めることを可能にするために、紫外線c−帯域放射光線を検出する紫外線c−帯域検出器を含む。 (もっと読む)
車両用路車間通信装置

【課題】VICSの光ビーコンのすぐ後にDSSSの光ビーコンが道路上に近接して設置された状況では、VICSの光ビーコンとの通信を終了する前にDSSSの光ビーコンの通信領域に車両が進入してしまうことがある。この場合、車両側の通信装置はDSSSの光ビーコンに対してアップリンク信号が送信することができないために、ユーザがDSSSのサービスを受けることができない。
【解決手段】光ビーコン近接地帯40内においては、VICSの光ビーコンの通信領域を通過するまで、制御部17は、路車間通信装置11がVICSの光ビーコンから送信される情報信号を受信することを禁止する。そのため、DSSSの光ビーコンの通信領域を車両が通過する際には、通信を行っていない状態であるため、路車間通信装置11は確実にDSSSの光ビーコンに対してアップリンク信号を送信することができる。
(もっと読む)
自律測位プログラム、自律測位装置および自律測位方法
【課題】高精度かつ低負荷の自律測位を実現すること。
【解決手段】車両101は、搭載した自律測位装置100によって、内蔵されたセンサから検出した移動距離および回転角に関する情報を利用して自律測位をおこなう。また、自律測位装置100は、車両101が道路に配置された光ビーコン102(102−1〜102−n)を通過することによって、光ビーコン102の配置場所を基準地点として位置情報を取得することができる。位置情報は、経緯度、高度といった基準地点の絶対位置を表す。したがって、自律測位装置100は、自律測位結果と、位置情報とを連動させることによって、正確な移動軌跡を特定することができる。
(もっと読む)
車両用位置測定装置
【課題】道路の上方に設置された光ビーコン等の路側通信機を利用して車両位置を正確に測定することができる車両用位置測定装置の提供。
【解決手段】GPSにより車両位置を検出する位置検出手段と、光ビーコン100から位置情報を含む光ビーコンデータを受信する車載通信手段1と、その光ビーコンデータを受信すると車両上方撮像を開始する撮像手段3と、撮像画像から光ビーコンヘッド像100aを抽出する抽出手段と、車両が光ビーコン100の真下に位置するときに画像中で光ビーコンヘッド像が占める位置を基準位置として予め設定しておき、抽出された光ビーコンヘッド像が基準位置に位置するか否かを判定する真下判定手段と、光ビーコンヘッド像が基準位置に位置する場合に、その光ビーコンヘッド像の撮像時点での車両位置を光ビーコンデータの示す位置と一致させるように、車両位置を補正する位置補正手段とを備える。
(もっと読む)
路車間通信システム
【課題】路車間通信において得られた情報を用いることで自車両の位置を特定する精度を向上させた路車間通信システムを提供することを課題とする。
【解決手段】トンネル入口付近に設けられた情報提供装置11と車載されたナビゲーションシステムとの間で通信を行う路車間通信システムにおいて、情報提供装置11は設置された位置情報ならびに情報提供装置11より先の道路の道路線形情報を送信提供し、ナビゲーションシステムは、情報提供装置11から送信提供された情報を受信する送受信部12と、CAN14を介して収集された自車両の挙動を認識する走行状態認識部154と、GPS13により自車両の位置を認識する位置認識部152と、情報提供装置11から送信提供された情報に基づいて自車両の位置を補正し、補正された自車両の位置と自車両の挙動とに基づいて、自車両の位置を特定する自車位置処理部155とを備えて構成される。
(もっと読む)
路車間通信システム
【課題】アップリンク領域を複数の分割領域として車両の位置特定を行う際の特定精度の低下を抑制し、高い精度の車両位置情報を提供することができる路車間通信システムを提供する。
【解決手段】本発明の路車間通信システム1は、アップリンク領域を構成する複数の分割領域に対応して、ビーコンヘッド8に設けられた複数のフォトダイオード9と、複数のフォトダイオード9それぞれにおいて受光が認められるかいな否かを判定する判定部50と、判定部50の判定結果に基づいて、車載機2のアップリンク光UOの送信位置を特定する位置特定部51とを備えている。さらに、判定部50が複数のフォトダイオード9の内、一つのフォトダイオード9のみ又は互いに隣り合う二つのフォトダイオード9のみにおいて受光が認められると判定した場合に、前記送信位置に関する情報を含んだダウンリンク光DOをビーコンヘッド8に送信させる制御部49を備えている。
(もっと読む)
車両用車線認識装置
【課題】光ビーコンを用いて、より確実に車両が走行している車線を認識することが可能な車両用車線認識装置を提供すること。
【解決手段】光ビーコンから情報を受信可能な受信手段と、並走車両の存在を検知可能な並走車両検知手段と、を備え、前記受信手段により前記光ビーコンが有する複数の投受光器から車線に関する情報が取得された場合に、前記並走車両検知手段により自車両の左右いずれの側に並走車両が検知されたかに基づいて、自車両の走行している車線を認識することを特徴とする、車両用車線認識装置。
(もっと読む)
車両用車線認識装置
【課題】コスト負担を抑制しつつ、投受光器との通信を行なう際に車両の走行している車線を認識することが可能な車両用車線認識装置を提供すること。
【解決手段】光ビーコンから情報を取得可能な車両に搭載される車両用車線認識装置であって、車両の位置を取得する車両位置取得手段と、地図データを記憶した地図データ記憶手段と、車両周辺を撮像する撮像手段と、前記車両位置取得手段により取得された車両の位置、及び前記地図データを用いて、前記光ビーコンが存在すると予想される所定エリアに車両が接近しているか否かを判定し、前記所定エリアに車両が接近していると判定した場合に前記撮像手段を作動させる制御手段と、を備える車両用車線認識装置。
(もっと読む)
車両支援装置及びその方法
【課題】
車両の位置評定に光ビーコン装置を利用することにより、車両の前進方向に対する角度を算出し、車両の位置評定の精度を向上させる車両支援装置を提供する。
【解決手段】
車両支援装置は、路側装置の発光手段1からの複数の拡散光線を受光手段2が受光し、光情報検出手段3が当該受光した光量を検出し、光情報記憶手段4がこの光量を記憶し、変化量演算手段5がこの光量の変化量を演算し、移動方向予測手段7が移動速度計測手段6により計測された移動速度及びこの変化量に基づいて車両の移動方向を予測し、表示手段8がこの予測結果を表示するものであり、発光装置1からの拡散光線の変化量により車両の移動角度を算出して移動方向を予測することで車両の位置評定の安定化及び高精度化を図ることができる。
(もっと読む)
ロボットアーム用位置情報測定装置及び方法
ロボットアームのための位置測定が、ロボットアームに取り付けられた投光器(10)で、この投光器(10)に関して固定された複数の異なる光路に沿って光線(50)を放射するように配置される投光器(10)と、ロボットアームのベース部を取り囲む支持フレームであって、複数のイメージセンサーをこの支持フレーム上の固定された位置に備えた、着脱可能な支持フレーム(20)とを用いて行われる。前記光センサー(22)に接続された信号処理装置(25)がイメージセンサー(22)上に光線(50)が入射した位置を決定し、これによってフレーム(20)に対する投光器(10)に伴う座標系の位置情報を決定する。このようにすると、相対的な位置測定を、実質的にリアルタイムで、正確かつ安価に行うことができる。 (もっと読む)
11 - 20 / 102
[ Back to top ]