
国際特許分類[G01S13/06]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 電波の反射を使用する方式,例.一次レーダ方式;類似の方式 (1,818) | 物標の位置データを決定する方式 (1,263)
国際特許分類[G01S13/06]の下位に属する分類
路離のみを測定するための方式 (942)
距離とそれに類する他のものとの同時測定 (186)
位置データの間接的な決定 (89)
国際特許分類[G01S13/06]に分類される特許
11 - 20 / 46
電波センサ
【課題】被検知体の位置や移動状態を精度良く識別するコンパクトな電波センサを提供する。
【解決手段】少なくとも1つの受信アンテナ(受信電極22a、22bとが一対)を、第1接地電極13を背面に備え電波ビームを前方に放射する送信アンテナ(送信電極12)の周囲、且つ送信アンテナよりも下方側に配置し、送信アンテナから放射され、被検知体に衝突し反射して戻ってきた電波ビームを受信し、受信アンテナに流れる電流をダイオード24で検波し、その検波結果に基づいて制御部53に備えた動作判断回路にて被検知体の動きを判断する。
(もっと読む)
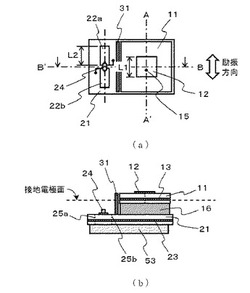
電波センサ

【課題】被検知体の位置や移動状態を精度良く識別するコンパクトな電波センサを提供する。
【解決手段】電波ビームとして前方に放射する少なくとも第1接地電極13と薄膜状の送信電極12とを有する平板状の送信アンテナの放射面に対し、被検知体に衝突し反射して戻ってきた電波ビームを受信する少なくとも第2接地電極23と薄膜状の受信電極22a、22b(一対のダイポールアンテナ)とを有する平板状の受信アンテナの受信面が略直交し、且つ送信電極12に対して受信電極22a、22bよりも第2接地電極23が近接するように、受信アンテナを配置する。
(もっと読む)
ウェイト算出方法、ウェイト算出装置、アダプティブアレーアンテナ、及びレーダ装置
【課題】 パルスレーダ装置において、受信信号の位相及び振幅に対するウェイトをスライディングウィンドウ方式によって計算するための共分散行列データの導出に要する計算量を軽減する。
【解決手段】 受信データ蓄積状況を監視し(ステップS1)、iが1からLになるまで、第i番目のレンジセルの共分散行列Ri を算出して一時保存する(ステップS2〜S5)。次に、iが1からTになるまで、該当トレーニングサンプル数分の共分散行列データRi を呼び出し、足し込んで平均をとり、その平均共分散行列データR[1]rrを一時保存する(ステップS6〜S10)。続いて、iが2からLになるまで、平均化された共分散行列データR[i-1]rrを呼び出し、R[i-1]rrにRi ,Ri-4を足し込み、R[i-1]rrからRi+3 ,Ri-1を差し引いて、その結果のR[i]rrデータを一時保存し(ステップS11〜S16)、一連の処理を終了する。
(もっと読む)
探知測距装置および探知測距方法
【課題】探知測距装置において、角度推定の前段に行われる目標数推定の計算負荷を軽減し、且つ、推定精度を向上させる。
【解決手段】擬似空間平均共分散行列生成部104b−6は、Rf1、Rf2、Rb1、Rb2から、適切な行列を一つ選択するか、適切な行列を2つ以上選択して組み合わせて、擬似空間平均共分散行列Rを生成する。擬似空間平均共分散行列エルミート共役積生成部104c−1は、目標数推定用行列RRHを生成する。目標数推定用行列分解部104c−2は、RRHにLU分解を施して下三角行列Lと、上三角行列Uとに分解する。指標生成部104d−1は、この上三角行列Uの要素を用いた指標を生成する。指標パラメータ走査処理部104d−2は、指標生成部104d−1によって生成された指標を用いて目標数mを推定する。
(もっと読む)
レーダー装置
【課題】低い演算負荷で測定範囲の対象物との相対速度や相対距離などを測定することができるレーダー装置を提供する。
【解決手段】測定範囲内に存在する対象物で反射した反射波のレベルを予め定めた閾値と比較する。そして、予め定めた閾値以上となる反射波のみに基づいて対象物との相対距離として測定し、当該反射波をフーリエ変換処理することによってドップラー周波数を算出し、算出したドップラー周波数に基づいて対象物との相対速度を算出する。
(もっと読む)
レーダー装置
【課題】車両に搭載されるレーダー装置に必要とされる性能を満たしながら、短時間で測定を完了することができるレーダー装置を提供する。
【解決手段】制御処理部は、第1の測定方式による測定を開始し、対象物が測定範囲内に存在するとき、対象物との相対位置及び相対速度を測定する。そして、制御処理部は、第1の測定方式によって測定した対象物の相対位置に基づいて再測定範囲を決定する。制御処理部は、再測定範囲を決定すると、再測定範囲のみを第1の測定方式よりも分解能の高い第2の測定方式で測定する。
(もっと読む)
物体検知装置
【課題】物体の二次元の位置情報が得られる物体検知装置を提供する。
【解決手段】伝搬速度が異なる複数の信号を伝搬する出射用線状アンテナと入射用アンテナを対象空間Pの一辺に布設し、対象空間P中に複数箇所設定された各被検出点における電波の反射係数を複数の受信信号とあらかじめ知られた各被検出点における電波の結合損失とから算出する。
(もっと読む)
レーダ処理装置および位置特定プログラム
【課題】得られた位置情報の分布に基づいて、測定対象物が存在する位置を推定することにより、測定対象物の位置情報の取得精度を向上させることが可能なレーダ制御装置および位置特定プログラムを提供すること。
【解決手段】反射波から、距離方向、方位方向および高低方向のうち2または3方向のマトリックスを用いてマトリックス状の受信データを順次取得しながら、取得したマトリックス状の受信データに基づいて前記測定対象物の位置を推定し、前記測定対象物の位置情報を出力する。
(もっと読む)
レーダ装置
【課題】アンテナに異常が発生した際に、アンテナを取り外すことなく、アンテナの異常箇所を特定し得るレーダ装置を提供する。
【解決手段】記憶部133に記憶され正常時のメインローブの信号成分の振幅レベル、サイドローブの信号成分の振幅レベル及びバックローブの信号成分の振幅レベルそれぞれを比較した基準データを用いて、データ比較部135及び差異部145により実際のメインローブ、サイドローブ及びバックローブそれぞれの振幅レベルの比較結果から空中線装置110の異常の有無の判定等を行なうようにしている。
(もっと読む)
三次元センサのデータ補正装置及び方法
【課題】陸上に三次元センサを設置し、海面上の物体を検知・計測する場合に、基準平面を自動で補正でき、三次元センサをそれぞれ別の位置に設置し、複数の三次元センサを併用する場合に、各センサの座標系を共通のグローバル座標系に自動で調整できる三次元センサのデータ補正装置及び方法を提供する。
【解決手段】緯度・経度取得手段22、日時取得手段24、潮位計算手段26、および三次元座標補正手段28を備え、潮位計算手段26で算出した潮位を用いて三次元センサ10の座標データを補正する。また方位取得手段32、および三次元座標基準設定手段34を備え、緯度・経度、方位、水準面からの高さ、水準面からの傾き量(ピッチ、ロール)が把握できるため、グローバル座標系自身の三次元座標の基準を、グローバル座標系に合うよう自動設定する。
(もっと読む)
11 - 20 / 46
[ Back to top ]