
国際特許分類[G01S13/44]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 電波の反射を使用する方式,例.一次レーダ方式;類似の方式 (1,818) | 物標の位置データを決定する方式 (1,263) | 距離とそれに類する他のものとの同時測定 (186) | モノパルスレーダ,すなわち同時ロービング (119)
国際特許分類[G01S13/44]に分類される特許
31 - 40 / 119
レーダ装置
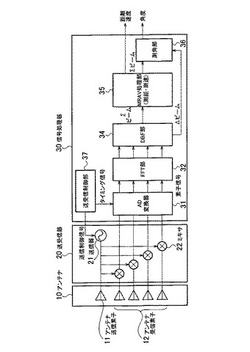
【課題】近距離から遠距離までの広範囲で複数目標が存在する場合であっても、高い検知性能で、高精度に目標を観測できるレーダ装置を提供する。
【解決手段】FMCW変調されたスイープ信号を少なくとも2回送信する送受信器20と、送受信器からの送信に応答して受信されたスイープ信号を高速フーリエ変換するFFT部32と、FFT部でフーリエ変換することにより得られた信号に基づき、送受信器による2回のスイープの各々に対応するビート周波数を算出し、算出したビート周波数差と時間差とから速度を算出し、算出した速度とビート周波数とから距離を算出することにより、複数の目標の距離と速度を算出するMRAV処理部35を備える。
(もっと読む)
モノパルスドップラレーダ装置

【課題】方位を含むターゲット検知データを短い周期で算出できるモノパルスドップラレーダ装置を提供する。
【解決手段】モノパルスドップラレーダ装置100は、A/D変換部126からI信号ディジタル値、Q信号ディジタル値を入力してターゲットの距離、相対速度及び方位を算出するディジタル演算処理部として、主演算処理部130と高速演算が可能な補助演算処理部140の2つを備える構成としている。補助演算処理部140では、演算量が多いプリサム処理、FFT処理、及びターゲット判定処理を行わせ、主演算処理部130では、方位算出処理を行わせている。また、主演算処理部130における方位算出処理は、ターゲット判定処理でターゲットが検出された距離ゲートおよび周波数ゲートに対してのみ行わせるようにすることで、方位算出処理で行う演算量を大幅に低減している。
(もっと読む)
レーダ装置
【課題】受信部の構成をシンプルにして位相モノパルス方式により位相の測定を高精度に行えるレーダ装置を提供する。
【解決手段】レーダ装置100は、受信系として、2つの受信アンテナ121、122と、受信アンテナ121、122から2つの受信信号を入力して両者を加算した和信号と両者の差である差信号を出力するハイブリッド回路123と、ハイブリッド回路123から和信号及び差信号を入力するスイッチ124と、スイッチ124から入力した和信号または差信号をIQ復調して相互に位相が直交するI信号及びQ信号を出力する受信部125とを備えている。2つの受信アンテナ121、122からの受信信号を、スイッチ124で切り替えることで1系列の受信部125で処理させるように構成している。
(もっと読む)
レーダ装置
【課題】目標角度を正確に計測することのできるレーダ装置を得る。
【解決手段】互いに異なる条件で観測した複数チャネルにおいて、それぞれ和信号と差信号とを観測する多チャネルモノパルス信号観測手段と、複数チャネルの信号にフィルタ処理を適用することにより、和信号および差信号に含まれる背景の不要信号をそれぞれ抑圧するフィルタ手段2a、2bと、フィルタ手段2a、2bにより背景の不要信号が抑圧された信号に対して閾値判定処理を適用し、目標の存在するレンジセルを検出する目標検出手段3と、目標検出手段3により検出された目標の存在するレンジセルにおいて、背景の不要信号を抑圧した和信号および差信号を用いたモノパルス測角処理を適用し、目標角度を計測する多チャネルモノパルス測角手段4と、を備えている。
(もっと読む)
車載用モノパルス式レーダ装置
【課題】受信波に含まれる不要信号を除去して対象物を正しく検知することが可能な車載用モノパルス式レーダ装置を提供する。
【解決手段】車載用モノパルス式レーダ装置100は、通常行う対象物の検知とは別に、所定の時間間隔で不要信号の計測を行っており、測定された不要信号計測値を記憶部103に記憶している。そして、通常の対象物の検知の際には、記憶部103から不要信号計測値を読み出して不要信号補正値を算出し、これを受信信号から差し引くことで不要信号の影響を低減するように構成されている。本実施形態では、不要信号に送信信号12の反射波も含めて計測されるのを防止するために、不要信号を計測するときには送信部110を停止させて受信部120側だけを動作させるようにしている。これにより、不要信号のみを計測して記憶部103に記憶させておくことができる。
(もっと読む)
レーダ信号処理装置とその目標判定方法
【課題】低S/N環境下においても目標を識別し距離や速度を特定することができるようにする。
【解決手段】目標11からの反射波はアンテナ1から取り込まれ、受信器2で受信される。受信された信号はA/D変換器3でデジタル信号に変換されて目標検出器4で信号処理されて、目標航跡の仮データが求められる。目標検出器4では、デジタル信号に変換された信号をフーリエ変換し、複数回分取り込んで、ハフ変換やTBDアルゴリズムなどの方法によって目標と思われる航跡を抽出し、これを目標航跡仮データとする。この目標航跡仮データは、観測毎の距離のデータ列および速度のデータ列であり、目標判定処理器5に送られる。この目標判定処理器5は、観測毎に得られる目標航跡仮データから目標の航跡を判定し、単一の目標と判定されたときはこの目標の航跡情報とすることで、真の目標航跡データを求める。
(もっと読む)
レーダ装置
【課題】モノパルス方式のレーダ装置において、位相折り返しに起因して発生するゴーストの情報を的確に区別することで、物標の実際の方位を正確に検出する。
【解決手段】モノパルス方式のレーダ装置において、一直線状に配置された3つ以上の受信アンテナ部は、アンテナ間隔として第一間隔を形成する2つの受信アンテナ部を含む第一アンテナ対と、該第一間隔とは異なるアンテナ間隔として第二間隔を形成する2つの受信アンテナ部を含む第二アンテナ対とを有する。そして、第一間隔と第二間隔との比率と、第一アンテナ対および第二アンテナ対のそれぞれにおける受信信号の位相差とに基づいて、該第一アンテナ対および該第二アンテナ対のうち少なくとも何れかのアンテナ対における位相折り返し数を算出し、該位相折り返し数を利用して物標の方位検出を行う。
(もっと読む)
レーダ装置用アンテナ
【課題】誘電体の放射基板に表面波の発生を抑制して一体化構造で形成され、広角度に測角可能なレーダ装置用アンテナを提供する。
【解決手段】レーダ装置用アンテナ400は、放射基板420に4×2の配列で合計8個のアンテナユニット410のパターンが形成されている。放射基板420の裏面には第1の地板401が形成され、さらに第1の地板401を挟んで線路基板405が設けられている。放射部402aは放射基板420上にパターンで形成されており、給電部402bはスルーホールで形成されて伝送線路404に接続されている。第2の地板403も、放射基板420上のパターンで形成されたランド403aとスルーホール403bで形成されている。
(もっと読む)
二次監視レーダ装置及び二次監視レーダ装置によるモノパルス測角方法
【課題】構成を簡略化することができる二次監視レーダ装置を提供する。
【解決手段】二次監視レーダ装置1は、受信した信号から生成されるΣ信号SΣを振幅情報Σa及び位相情報Σpを含むLog増幅信号SΣLogに増幅するLog増幅器41と、Log増幅信号SΣLogをデジタル信号SΣdにデジタル変換するA/D変換器42とを有するΣ信号処理部32と、受信した信号から生成されるΔ信号SΔを振幅情報Δa及び位相情報Δpを含むLog増幅信号SΔLogに増幅するLog増幅器51と、Log増幅信号SΔLogをデジタル信号SΔdにデジタル変換するA/D変換器52とを有するΔ信号処理部33と、振幅情報Σa、位相情報Σp、振幅情報Δa及び位相情報Δpから航空機91の方位角度θを演算するモノパルス演算部37とを備えている。
(もっと読む)
レーダ装置
【課題】複数のアレイアンテナを利用して位相モノパルス方式によって電波の到来する方位角と仰角の両方を検知することを可能にする。
【解決手段】レーダ装置において、受信アンテナは、複数の素子アンテナが配列された少なくとも3つのアレイアンテナを、水平方向に互いに隣接するように並べて構成され、当該3つのアレイアンテナの位相中心点が二等辺三角形を形成するように、当該3つのアレイアンテナのうちの中央のアレイアンテナが鉛直方向にずらして配置される。レーダ装置は、当該3つのアレイアンテナによってそれぞれ受信された電波の位相の関係に基づいて、当該3つのアレイアンテナのうちの隣接する2つのアレイアンテナによって受信された電波の位相差を補正する機能を備える。
(もっと読む)
31 - 40 / 119
[ Back to top ]