
国際特許分類[G01S13/44]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 電波の反射を使用する方式,例.一次レーダ方式;類似の方式 (1,818) | 物標の位置データを決定する方式 (1,263) | 距離とそれに類する他のものとの同時測定 (186) | モノパルスレーダ,すなわち同時ロービング (119)
国際特許分類[G01S13/44]に分類される特許
11 - 20 / 119
アンテナ装置
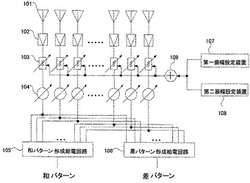
【課題】従来は、和パターン、差パターン用別回路で大規模となる。差パターンを複数アンテナのサブアレーで振幅分布制御するものは、第一装置で和パターンの低サイドローブ化振幅設定がされ、第二装置でサブアレー単位の差パターン低サイドローブ化振幅設定をしても性能に限界がある。
【解決手段】アンテナ開口を形成する複数の素子アンテナ、各素子アンテナ受信信号に振幅付与の振幅制御手段、和パターンで低サイドローブ化実現用振幅設定の第一振幅設定装置、差パターンで低サイドローブ化実現用振幅設定の第二振幅設定装置、第一振幅設定装置と第二振幅設定装置の設定振幅を合成し、振幅制御手段を制御する合成器、各素子アンテナ受信信号に所定位相を与える位相制御手段、位相制御手段の出力でモノパルス和パターン信号形成の給電回路、位相制御手段の出力でモノパルス差パターン信号形成の給電回路を有する。
(もっと読む)
レーダ装置

【課題】対象物の水平方向と鉛直方向の両方の角度を検出できるレーダ装置を得る。
【解決手段】全てのアンテナは、水平面と直角となる平面である鉛直面に配置され、かつ長方形である開口面の長手方向が鉛直方向に配置され、受信アンテナRx1、Rx2は、素子間隔Lhで水平方向に配置され、送信アンテナTx1、Tx2は、受信アンテナRx1、Rx2を挟むように、水平方向に配置され、受信アンテナRx3、Rx4は、素子間隔Lvで鉛直方向に配置され、かつ、送信アンテナTx2に隣接して水平方向に配置され、送信アンテナTx1、Tx2から時分割に高周波パルス信号を送信させ、受信アンテナRx1、Rx2によって受信された2つの受信信号の位相差から水平方向の方位角を検出するとともに、受信アンテナRx3、Rx4によって受信された2つの受信信号の位相差から鉛直方向の仰俯角を検出する信号処理器10を備える。
(もっと読む)
モノパルス給電回路
【課題】本発明は、複数のアンテナに並行して到来した到来波の和と差とのパターンを得ることにより、その到来波の到来方向の計測等を可能とするモノパルス給電回路に関し、従来例に比べて構成が簡略化され、かつ実装上の制約の緩和が大幅に図られると共に、軽量化および小型化が可能であることを目的とする。
【解決手段】互いに貫通して交叉する導波路を形成する第一の導波管と、前記第一の導波管の側壁の内、前記導波路が交叉する部位に突設され、前記導波路を拡張する第二の導波管とを備え、前記導波路の4つの末端から前記部位までの長さは、個別に点対称に配置された2対のアンテナの個々の給電点から前記4つの末端をそれぞれ介して前記部位に至る4つの区間の伝搬路長が同じとなる値に設定される。
(もっと読む)
干渉レーダーの曖昧さを除去するために証拠グリッドを使用するためのシステムと方法
【課題】2つのレシーバだけを使用して干渉を用いた関連する曖昧さを除去する手段を提供する。
【解決手段】システムは、第1の空間領域の上の第1の検出信号および第2の空間領域の上の第2の検出信号を送信する干渉レーダーを含む。第2の領域は、第1の領域と同じように第1の小区域を有する。システムは、第1の占有値を証拠グリッドの第1のセルに割り当てる処理装置を更に含む。第1のセルは、第1の小区域を表し、第1の占有値は、オブジェクトが第1の小区域に存在するとして第1の検出信号により検出されたかどうか特徴づける。第1および第2の検出信号に基づいて、処理装置は、第1の占有値が第1の小区域のオブジェクトの存在を正確に特徴づける確率を計算し、確率計算に基づいて第1の小区域のデータ表現を生成する。
(もっと読む)
物体検知装置
【課題】物体を迅速かつ精度良く検知する。
【解決手段】物体検知装置10は、自車両の左前部および右前部に配置されて自車両の前方領域全体を1回で走査可能な広角の右レーダ11Rおよび左レーダ11Lと、処理装置12とを備える。処理装置12は、右レーダ11Rにより検出された反射点rRと左レーダ11Lにより検出された反射点rLとが同一の物体上に存在する場合に、反射点rR,rLの間の反射点間距離と、自車両の前後方向における各反射点rR,rLまでの距離を算出し、反射点間距離と各反射点rR,rLまでの距離とに基づいて物体の幅を検知する物体検知部26を備える。
(もっと読む)
物体検知装置
【課題】物体を迅速かつ精度良く検知する。
【解決手段】物体検知装置10は、車両(自車両P)の左前部および右前部に配置されて車両(自車両P)の前方領域全体を1回で走査可能な広角の右レーダ11Rおよび左レーダ11Lと、処理装置12とを備える。右レーダ11Rは、車両(自車両P)から前後方向前方に所定距離だけ離れた位置に存在する所定の先行車両Qに対して、右レーダ11Rの検出領域ARの左端と先行車両Qの後部左端QLとが一致するようにして配置されている。また、左レーダ11Lは、車両(自車両P)から前後方向前方に所定距離だけ離れた位置に存在する所定の先行車両Qに対して、左レーダ11Lの検出領域ALの右端と先行車両Qの後部右端QRとが一致するようにして配置されている。
(もっと読む)
物体検知装置
【課題】物体を迅速かつ精度良く検知する。
【解決手段】物体検知装置10は、自車両の左前部および右前部に配置されて自車両の前方領域全体を1回で走査可能な広角の右レーダ11Rおよび左レーダ11Lと、処理装置12とを備える。処理装置12は、右レーダ11Rにより検出された反射点rRと左レーダ11Lにより検出された反射点rLとが同一の物体上に存在する場合に、反射点rR,rLの左右方向位置差分Δを算出し、この差分Δが所定の閾値Aよりも大きいか否かを判定する左右方向位置判定部23と、反射点rR,rLの左右方向位置差分Δの時間微分絶対値βが所定の閾値Bよりも大きいか否かを判定する時間微分絶対値判定部24と、反射点間距離の変化に基づいて前方領域を横切る物体が存在することを検知する物体検知部25とを備える。
(もっと読む)
追尾装置、追尾方法、及びコンピュータプログラム
【課題】飛翔体のトランスポンダーから送信されてきた応答信号を受信し、その電波強度を基に、アンテナ角を飛翔体に追尾させる追尾装置で、サンプリングレートを高速化させることなく、高精度追尾が可能にする。
【解決手段】制御装置21の座標演算器22で現時刻の飛翔体の位置座標を算出し、位置推定器23で次時刻の飛翔体の位置座標を推定し、角度算出器24で次時刻のアンテナの角度の推定値を算出している。そして、推定された次時刻でのアンテナの角度を目標値として、アンテナ31の向きを制御している。このように、本発明の第1の実施形態では、次時刻でのアンテナの角度の推定値を目標値として、アンテナ31の向きを制御しているため、サンプリングレートを高速化させることなく、高精度追尾が可能になる。
(もっと読む)
低電力空間結合フェーズドアレイレーダー
【課題】低電力空間結合フェーズドアレイレーダーを提供する。
【解決手段】レーダーシステムが取り付けられるか、又は組み込まれる構造にレーダーシステムを適合させることができるようにする複数の小型レーダーである。レーダーシステムは、クロックと、クロックと通信する複数の周波数変調/持続波(FM/CW)又はパルス圧縮レーダーユニットと、複数のFM/CWレーダーユニットと通信するプロセッサとを備える。複数のFM/CWレーダーユニットはそれぞれ一列のアンテナ素子を含む。
(もっと読む)
モノパルスレーダ装置
【課題】 モノパルスレーダアンテナにおいて、給電部を構成するコンパレータの方向性結合器を用いる場合、180°の位相差の線路を用いる必要がある。そのため、線路長が長くなり通過位相、通過振幅、アイソレーション特性、反射特性の周波数特性が狭帯域になる問題がある。
【解決手段】給電部においてブランチカプラまたは、サイドウォールショートスロットカプラの方向性結合器を用いるコンパレータで、180°の位相差の線路を取り除く。それと同時に、放射部において、4つの象限に分けたアレーアンテナ開口面のある象限を逆位相にする。これにより、従来と同様にΣ信号、ΔAz信号、ΔEl信号を出力する特性を維持したまま、給電部の線路長を短くすることができる。これにより、通過位相、通過振幅、アイソレーション特性、反射特性の周波数特性の広帯域化を達成する。
(もっと読む)
11 - 20 / 119
[ Back to top ]