
国際特許分類[G01S19/52]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 衛星電波ビーコン測位システム;当該システムから送信される信号を用いた,位置,速度または姿勢の決定 (1,115) | 衛星電波ビーコン測位システムの送信信号を用いた,航法解の決定 (298) | 衛星電波ビーコン測位システムがタイムスタンプメッセージを送信するもの,例.GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] , GALILEO (297) | 速度の決定 (20)
国際特許分類[G01S19/52]に分類される特許
11 - 20 / 20
ターゲット識別装置およびターゲット移動予測方法
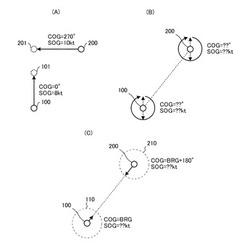
【課題】船舶等のターゲットが停止状態または低速移動状態のときにCPA、TCPAがランダムな変動をしないようにしたターゲット識別装置を提供する。
【解決手段】自己の位置、対地速度、対地方位を取得する自己情報取得部と、ターゲットの位置、対地速度、対地方位を取得するターゲット情報取得部と、自己の位置、対地速度、対地方位、ターゲットの位置、対地速度、対地方位に基づいて、自己とターゲットとの最接近距離および最接近時間を算出し、自己の対地速度が所定の低速判定値以下のとき、自己の対地方位を前記ターゲット方向に書き換えて、前記最接近距離および最接近時間を算出する演算部とを備える。
(もっと読む)
方位角推定装置及びプログラム

【課題】マルチパスを適切に判定して、精度良く移動体の方位角を推定する。
【解決手段】複数のGPS衛星の各々から発信されたGPS情報を取得し、方位角推定部30で、GPS情報に基づいて自車両の方位角(推定方位角)を推定する。最適推定部62は、ジャイセンサ14の検出値に基づいて自車両の方位角(観測方位角)を算出し、推定方位角と観測方位角とを統合して最適値を推定する。精度判定部64は、最適値と推定方位角との残差の分散が閾値以下か否かに基づいて、最適値の精度を判定する。速度ベクトル算出部66は、最適値の精度が高いと判定された場合には、最適値を推定する方位角として採用し、最適値及び速度センサ16で検出された速度を用いて速度ベクトルを算出し、精度が低いと判定された場合には、過去に推定された方位角を用いてジャイロセンサ14の検出値を積算して算出した方位角を採用して、速度ベクトルを算出する。
(もっと読む)
姿勢角安定化装置及び方法
【課題】高精度速度計測装置に組み込まれて、移動体の静止時における位置、速度及び方位の変化を解消すると共に、静止状態から動的状態に切り替わるときであっても、連続的な姿勢角及び速度応答出力を行うことができるようにする姿勢角安定化装置及び方法を提供すること。
【解決手段】姿勢角安定化装置100は、移動体の角速度とフィードバックした補正値とから姿勢角の変化量を算出し、算出した姿勢角の変化量を積分した姿勢角と、カルマンフィルタによって推定された姿勢角の推定値とから姿勢行列を生成し出力する。そして、動作時と判定した場合に生成した姿勢行列のラッチを行い、静止時と判定した場合に静止時であると判定する前の姿勢行列のラッチを保持し、ラッチしている姿勢行列と、生成した姿勢行列とから姿勢角誤差を算出し、算出した姿勢角誤差と生成した姿勢行列とに基づいて姿勢角を補正するための補正制御値を算出し、フィードバックする。
(もっと読む)
移動体高精度速度計測装置及び方法
【課題】GPS受信機から得られるドップラー速度情報の良否を判定し、高精度及び高信頼の速度をリアルタイムに出力する装置及び方法を提供すること。
【解決手段】移動体高精度速度計測装置10は、移動体の加速度及び角速度からストラップダウン演算により速度を算出し、GPS搬送波のドップラーシフト量から移動体のドップラー速度を測定し、ドップラー速度から良否係数を算出する。次に、遅延させたドップラー速度と、フィードバックさせたリアルタイム補間速度との同期化を行い、同期化されたドップラー速度とリアルタイム補間速度との誤差量を算出し、算出した誤差量に良否係数を乗算し、良否係数を乗算した誤差量からリアルタイム補間速度に対する調整量を、カルマンフィルタによって推定演算する。そして、ストラップダウン演算により算出した速度に、カルマンフィルタによって推定演算された調整量を融合してリアルタイム補間速度を算出し、出力する。
(もっと読む)
衛星測位システムにおいて時間を決定するための方法および装置
【課題】衛星測位システムにおいて時間を決定するための方法および装置。
【解決手段】一つの実施態様において、基準時間は、他のナビゲーション情報を決定するのに使用される。そのようなナビゲーション情報は、例えば、衛星測位システム(SPS)の受信機のローカル/位置を含む。一つの実施態様において、SPSの受信機と1組の一つ以上の衛星との間の相対速度は、SPSの受信機により示されるような時間と基準時間との間のオフセットを決定するために使用される。他の実施態様に関して、誤り統計が、基準時間を決定するために使用される。他の実施態様に従って、衛星の少なくとも位置を各々代表する二つの記録が比較され、時間を決定する。一つの実行において、SPSの受信機は移動であり、前記方法の一つ又は組み合わせにより、基地局に関連して時間と/又は他のナビゲーション情報を決定するように動作する。
(もっと読む)
相対速度計測装置および相対変位計測装置
【課題】本発明は、衛星航法系を構成する航行衛星の相対速度と相対変位とをそれぞれ求める相対速度計測装置および相対変位計測装置に関し、航行衛星の相対速度の値域が制限されている場合であっても、所望の航行衛星の相対速度や相対変位を効率的にかつ精度よく求めることを目的とする。
【解決手段】衛星航法系を構成する1つの航行衛星について求められ、かつ値域r1、…、rpを個別に有する複数pの相対速度y1、…、ypと、前記値域r1、…、rpの幅w1、…、wpと、前記幅w1、…、wpに対応する整数h1、…、hpとに対してE=y1+w1・h1=…=yp+wp・hpが所定の精度で成立する相対速度Eを得る。
(もっと読む)
GNSS受信機、航法装置、信号処理装置、GNSS速度補正プログラム及びGNSS速度補正方法
【課題】アンテナの動揺による速度測定値の誤差を遅延無く除去することが可能であり、しかも特別な設定作業等を行う必要が無いGNSS受信機を提供する。
【解決手段】本実施形態のGPS受信機2は、GPSアンテナ4と、GNSS位置・速度算出部11と、磁気方位センサ5と、傾斜センサ6と、動揺速度除去部15と、を備えている。GPSアンテナ4は、船舶に取り付けられ、GPS衛星からの測位用信号を受信する。GPS位置・速度算出部11は、測位用信号に基づいて、GPS速度を算出する。磁気方位センサ5は、船舶の船首方向の絶対方位を検出する。傾斜センサ6は、GPSアンテナ4の傾斜角を検出する。動揺速度除去部15は、絶対方位及び傾斜角に基づいて、GPSアンテナ4の動揺による誤差を算出してGPS速度から除去する。
(もっと読む)
測位装置及びプログラム
【課題】簡易な方法でマルチパスの影響を考慮した信頼性の高い測位結果を得る。
【解決手段】測位演算部26で、GPS受信機12から出力された擬似距離及びドップラーシフト周波数に基づいて、受信位置の位置座標及び速度を演算する。建物高情報取得部30で、建物高情報記憶部28に記憶された緯度及び経度に対応した建物高情報から、演算された位置座標に対応した受信位置周辺の建物高情報を取得する。観測誤差算出部34で、GPS受信機12から出力された衛星仰角、取得された建物高情報、演算された位置座標及び速度に基づいて、擬似距離誤差及びドップラーシフト誤差を算出し、誤差補正測位演算部36で、GPS受信機12から出力された擬似距離及びドップラーシフト周波数、並びに観測誤差算出部34によって算出された擬似距離誤差及びドップラーシフト誤差に基づいて、誤差を補正した受信位置の位置座標及び速度を演算する。
(もっと読む)
位置測定装置および位置測定方法
【課題】 受信信号の帯域幅に影響されることなく、かつ回路規模の削減が可能で、さらに異なる発射源からの電波に対しても、それぞれの発射源位置を分離して測定することが可能な位置測定装置の提供。
【解決手段】 位置測定装置は、移動しながら電波発射源からの電波を受信する2つの移動体受信部1a,1bと、2つの移動体受信部1a,1bで受信される信号を取得してその周波数差を算出し、その周波数差の時間的変化から電波発射源の位置を測定する発射源位置測定部10とを含む。
(もっと読む)
列車制御装置
【課題】GPSを利用して列車が停止しているかどうかを精度良く検出して列車の速度を制御する。
【解決手段】2台のGPS受信機3a,3bから出力する位置信号Pa,Pbから算出した速度Vaと速度Vbがあらかじめ設定された停止判定閾値以下になったとき、速度Vaと速度Vbがランダムに変動し、速度Vaと速度Vbが一致しなく、速度Vaと速度Vbの速度ベクトルの方向が列車1の経路情報と一致しなく、方位Dgがランダムに変動していることを検出したときに列車1が停止していると判定して、地上子やトランスポンダ等の地上設備を必要としないで2台のGPS受信機3a,3bからの位置信号Pa,Pbで列車1が停止していることを精度良く検出して地上設備を省略して設備費を低減する。
(もっと読む)
11 - 20 / 20
[ Back to top ]