
国際特許分類[G01S5/14]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 2またはそれ以上の方向線,位置線測定を座標づけすることによる位置決定;2またはそれ以上の距離測定を座標づけすることによる位置決定 (2,996) | 電波を使用するもの[1,2010.01] (2,630) | 互いに離れた複数個の既知位置の点からの絶対距離の測定によるもの (1,802)
国際特許分類[G01S5/14]に分類される特許
861 - 870 / 1,802
測位装置、測位方法及び測位装置を有する時計
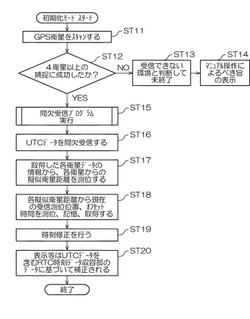
【課題】本発明は全衛星概略軌道情報を、日を跨いで分割取得することなく、連続的に取得しつつ、電力消費を低減することができる測位装置、測位方法及び測位装置を有する時計を提供することを目的とする。
【解決手段】位置情報衛星から時系列に連続して送信される航法メッセージ情報に基づき自己の位置を測位する測位装置10であって、全衛星概略軌道情報を含む送信情報区画の受信開始時と受信終了時を識別する信号識別部28を有しており、信号識別部28が識別した全衛星概略軌道情報を含む送信情報区画の受信時間に前記航法メッセージ情報を間欠受信する受信部11を有する測位装置10。
(もっと読む)
時刻修正装置、時刻修正装置付き計時装置及び時刻修正方法

【課題】超低電力が要求されるときでも、消費電力が高くならず、且つ、高精度な時刻修正が可能な時刻修正装置等を提供すること。
【解決手段】測位部と、時刻修正情報格納部52と、時刻情報修正部33と、を有し、時刻修正情報を生成するための基礎情報である3モードの時刻修正基礎情報42a等を格納する時刻修正基礎情報格納部と、時刻修正基礎情報に基づいて、時刻修正情報を生成する時刻修正情報生成部32と、を有し、3モードの時刻修正基礎情報を選択して実行するための選択情報41を有する時刻修正装置10。
(もっと読む)
変調信号、システムおよび方法
【課題】ナビゲーションシステムなどに適した信号を変調するための副搬送波変調信号および当該副搬送波変調信号を生成する方法を提供する。
【解決手段】副搬送波変調信号を生成する方法は、第1の副搬送波(BOC(5,1))の一部と第2の副搬送波(BOC(1,1))の一部を多重あるいは選択的に結合するステップを含む。
(もっと読む)
標高検出装置および自車位置判定装置
【課題】自車両が走行している地点の標高を高精度に検出することができ、ひいては、自車位置の判定精度を向上させることができる「標高検出装置および自車位置判定装置」を提供すること。
【解決手段】自車両が地表面上を走行している第1の区間では、標高データの取得によって自車両が走行している地表面上の地点の標高を検出し、自車両が立体構造物上を走行している第2の区間では、垂直方向移動量検出手段9によって検出された第2の区間の直前の地表面からの自車両の垂直方向の移動量を、補正用データを用いて補正し、補正後の垂直方向の移動量を当該直前の地表面の標高に加算することによって、当該立体構造物上の地点の標高を検出すること。
(もっと読む)
測位装置、その制御方法、制御プログラム及びその記録媒体
【課題】非同期の通信システムにおけるRTTを併用して2次元測位を行い、位置誤差の少ない位置を出力することができる測位装置等を提供すること。
【解決手段】SPS衛星からの衛星信号と、SPS衛星との時刻非同期の通信基地局からの通信信号を使用して2次元測位を行う測位装置20であって、衛星信号を受信して算出した擬似距離と前記SPS衛星の軌道情報に基づいて、測位装置の推定位置を示す推定線L2を算出する推定線算出手段と、通信信号が通信基地局と測位装置との間を往復する往復時間を取得する往復時間取得手段と、往復時間と通信基地局40の位置に基づいて、測位装置20の予想位置を示す予想円L3を算出する予想円算出手段と、推定線L2と予想円L3との共有点を算出する共有点算出手段と、共有点に基づいて、測位装置20が出力するための出力位置Pfixを算出する出力位置算出手段と、を有する。
(もっと読む)
衛星受信装置
【課題】衛星からの受信信号を確実に追尾することが可能な衛星受信装置を提供する。
【解決手段】I成分積算処理部76は、第1相関値を所定時間だけ積算して得られる第1積算相関値と、第2相関値を所定時間だけ積算して得られる第2積算相関値の絶対値との加算処理を行って、I成分積算相関値IE、IP、ILをコードループディスクリミネータ22に出力する。一方、Q成分積算処理部78は、第3相関値を所定時間だけ積算して得られる第3積算相関値と、第4相関値を所定時間だけ積算して得られる第4積算相関値の絶対値との加算処理を行って、Q成分積算相関値QE、QP、QLをコードループディスクリミネータ22に出力する。
(もっと読む)
受信信号の到来時間と端末位置を共同推定するための反復法
【課題】 マルチパスチャネル特性と移動体ネットワークからの情報の両方を使用する位置推定システムにおいて、NLOSの影響を軽減するための方法を提供する。
【解決手段】この方法は、端末位置の推定で最初に到来するパスの推定を改善及びその逆をしながら、受信信号の最初に到来するパスと端末位置とを反復して推定する。ピーク選択方法が、異なる各固定端末での受信信号のおよその到来時間(TOA)を決定し、移動ユニットの位置の推定が行われる。残差が不十分な場合、逆方向検索アルゴリズムによりTOAが改良される。新規TOAは、移動端末の位置推定の改良に使用される。さらに、逆方向検索アルゴリズムのパラメータは、推定された最初のパス内のより高い精度のために修正できる。最初に到来するパスの推定と位置推定は、収束条件又は終了条件に到達するまで反復され通常はしきい値設定によって制御される。
(もっと読む)
測位装置、測位装置の制御方法、その制御プログラム及び記録媒体
【課題】地図データを保持したり、通信基地局と通信する必要がないにもかかわらず、迅速にマルチパスを排除して測位を行うことができる等を提供すること。
【解決手段】SPS(Satellite Positioing System)衛星からの衛星信号を受信して現在位置を測位する測位装置20であって、受信した衛星信号に対応するSPS衛星の方位角を算出する方位角算出手段と、複数のSPS衛星の方位角に基づいて、マルチパス環境を含む受信環境を判断する受信環境判断手段と、を有する。
(もっと読む)
携帯型ナビゲーション装置及びナビゲーションプログラム
【課題】GPS信号から正しく方位情報を受信できない場合においても、自動的に精度の良い方位情報を取得しナビゲーションを行うことが可能な携帯型ナビゲーション装置を提供する。
【解決手段】仮想COMソフトウエア27は、GPSチップ21から入力したNMEAメッセージを解析し、NMEAメッセージ内の方位情報が正確であるか否かを判定する。正確であると判定した場合には、仮想COMソフトウエア27はNMEAメッセージをそのまま地図ナビゲーションアプリケーション28に出力する。一方、正確でないと判定した場合には、仮想COMソフトウエア27はNMEAメッセージ内の方位情報を地磁気センサ23で検出した方位情報に置き換えた上で、地図ナビゲーションアプリケーション28に出力する。
(もっと読む)
測位装置、その制御方法、制御プログラム及びその記録媒体
【課題】ドップラー偏移の誤差に応じて、各SPS衛星を迅速かつ効率的に捕捉することができる測位装置等を提供すること。
【解決手段】複数のSPS(Satellite Positioning System)衛星からの衛星信号を使用して測位を行う測位装置20であって、各SPS衛星の軌道上の衛星位置を算出する衛星位置算出手段と、測位装置20の初期位置P0と各SPS衛星の軌道上の衛星位置Pvとの相対位置を算出する相対位置算出手段と、相対位置に基づいて、各前記衛星信号の周波数のドップラー偏移の誤差であるドップラー偏移誤差を算出するドップラー偏移誤差算出手段と、ドップラー偏移誤差に基づいて、各衛星信号を受信するための周波数範囲を算出する周波数範囲算出手段と、を有する。
(もっと読む)
861 - 870 / 1,802
[ Back to top ]