
国際特許分類[G01S5/14]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 2またはそれ以上の方向線,位置線測定を座標づけすることによる位置決定;2またはそれ以上の距離測定を座標づけすることによる位置決定 (2,996) | 電波を使用するもの[1,2010.01] (2,630) | 互いに離れた複数個の既知位置の点からの絶対距離の測定によるもの (1,802)
国際特許分類[G01S5/14]に分類される特許
881 - 890 / 1,802
車載用ハードディスク装置

【課題】高度の高い位置においても、ハードディスクの表面と磁気ヘッドとの間の適切な隙間を確保し、ハードディスクへのアクセスを制限することなく済ませる。
【解決手段】筐体15のトップカバー15bに、筐体15の内部と外部との圧力差を解消するための呼吸穴22を設けると共に、その内側に、防塵・防湿用のフィルタ部材23を設ける。呼吸穴22の内側のフィルタ部材23が存在しない空洞部23aにダイアフラム部材24を設ける。ダイアフラム部材24は、通常時には下方に凸となるような湾曲形状となり、呼吸穴22を開放している。外部の気圧が一定以下(例えば0.7気圧以下)に低下すると、ダイアフラム部材24は、上方に凸となるように弾性的にたわみ変形し、呼吸穴22を塞ぐ。外部の気圧が元に戻ると、ダイアフラム部材24は元の状態に戻る。
(もっと読む)
通信端末および通信端末を制御するためのプログラム

【課題】アシストデータを送信するための情報提供装置の構成を複雑にすることなく、当該アシストデータを取得できる通信端末を提供する。
【解決手段】通信端末100が実行する処理は、アシストデータ要取得基地局バッファ領域(領域430)と待受け基地局バッファ領域(領域410)に、取得した識別子を格納するステップ(S716)と、受信した信号から無線基地局の識別子を取得して、RAM346に格納するステップ(S724)と、変化後の無線基地局の識別子を待ち受け基地局バッファ領域に格納するステップ(S732)と、待受け基地局バッファ領域に格納されている識別子がアシストデータ要取得基地局バッファ領域に格納されていない場合に(ステップS740にてNO)、待受け基地局バッファ領域に格納されている識別子を、アシストデータ要取得基地局バッファ領域に格納するステップ(S742)とを含む。
(もっと読む)
GPSを用いた測量システム
【課題】海上工事などにおいて、高精度で杭などの移動体を位置決めすることができる。
【解決手段】GPS30を用いた測量システム1は、陸上4に設けたGPS固定局31と、夫々にGPS移動局32を取り付けることで常に絶対位置が把握され、自動追尾機能を有する複数のトータルステーション10と、鋼管杭2に固定され、トータルステーション10と同数以上の反射体20と、GPS移動局32の位置に基づき、トータルステーション10が反射体20を視準して得られた反射体20の位置座標を修正し、鋼管杭2の現実の位置を算出する解析手段41と、鋼管杭2の現実の位置と計画位置との差を演算する比較手段42とを備えている。
(もっと読む)
マップマッチングに適するリンク設定システム、その方法およびプログラム
【課題】マップマッチングミスを無くすこと。
【解決手段】道路幅と平行する道路の道路幅や道路ネットワークの位置関係に応じてリンクのずらす方向とずらす距離を計算してリンクを設定する。
(もっと読む)
衛星ナビゲーション受信機の性能を高めるシステム及び方法
【課題】衛星ナビゲーション受信機の性能を高める。
【解決手段】GPS受信機102は、高精密(例えば、原子)クロック発生源106及び処理装置108を備える。処理装置は、複数の宇宙基地の衛星送信機からの複数の測定信号を受信処理し、クロック発生源を制御して精密周波数を生成させる。処理装置は、例えば5以上の測定信号が受信された場合、従来のRAIMを実施して周波数誤差をモデル化し、受信した測定信号が4以下の場合、3つの位置エラーを計算し、複数の現在のクロック位相オフセット値を推定し、3つの位置エラーに対するポスト更新測定誤差を画定し、該ポスト更新測定誤差を正規化し、モデル化された複数の周波数誤差の値の増大をモデル化し、3つの位置誤差値及びモデル化されたクロックエラーを使用して保全性をチェックする。
(もっと読む)
姿勢算出装置、および、姿勢算出方法
【課題】予備のGPSを含めた3台以上のGPS受信機を有し、各々のGPS受信機のアンテナから位置情報を受信し、受信した位置情報から物体の姿勢を算出する姿勢算出装置で、高精度の姿勢算出をおこなう。
【解決手段】3台以上のGPS受信機から姿勢を算出するGPS受信機の組合せを、予め固定で決めることなく、GPS受信機のアンテナ間の基線長が長い組合せを常時監視する。そして、各々のGPS受信機の組合せからアンテナ間の基線長が最も長い2台のGPS受信機を選択し、その2台から出力される情報情報を姿勢算出に用いる。
(もっと読む)
無線端末の居場所の予測方法
【課題】地理的領域における未知の場所で、無線端末の位置を予測する技術を提供すること。
【解決手段】本発明によると、この技術は、電磁(無線)信号の特徴は、地形、受信器、送信器の位置、その他のファクタに依存するという認識に基づいている。例えば、特定の無線(基地)局からの信号が、第1位置では強く受信され、第2位置では弱く受信されることがわかっていることを前提にすると、未知の場所にいる無線端末が、その無線(基地)局の信号を弱く受信した場合には、無線端末は、第1位置ではなく第2位置にいる可能性が高い。
(もっと読む)
情報処理装置、情報処理方法、及び、プログラム
【課題】低コストで且つ容易に障害物等の物体の位置を計算する。
【解決手段】情報処理装置100において、送信部101の送信機は情報処理装置100の周囲に超音波を送信する。受信部102の受信機はこの超音波の反射波を受信する。受信部102が障害物による反射波を検出すると、制御部109は、障害物と送信機・受信機との距離が、送信機と受信機との距離より十分小さいと近似して、障害物の位置及び障害物までの距離を求める。制御部109は計算結果を出力部105から出力し、計算結果に基づいて可動部103の動作・非動作を制御する。
(もっと読む)
地域的、広域、又は大域的キャリア位相差ナビゲーション(WADGPS)からローカル・リアル・タイム力学的(RTK)ナビゲーション・システムに移行するときに、位置情報の信頼性を高める方法
【課題】本発明は、ローカル測位システムと、ローカルRTKシステムと、地域、広域、又は大域差動搬送波位相測位システム(WADGPS)を組み合わせて利用する方法を含んでおり、ローカル測位システム、RTK及びWADGPSナビゲーション技術を別個に使用すると随伴する短所を回避する。本方法は、WADGPSからの情報に基づいて、前記対象の第1位置を判定し、ローカル測位/RTK測位システムからの位置情報に基づいて対象の第2位置を判定するステップを含む。その後、WADGPSによって判定した位置と、ローカル測位/RTK測位システムによって判定した位置とを比較する。WADGPS位置及びローカル測位/位置に既定の閾値を超える差がある場合、対象をナビゲートするためにWADGPS位置を用い、WADGPS位置及びローカル測位/RTK位置に既定の閾値未満の差がある場合、対象をナビゲートするためにローカル測位/RTK位置を用いる。 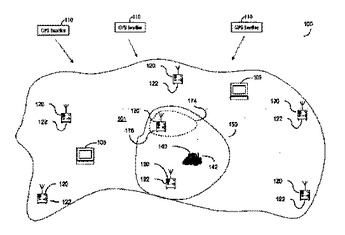 (もっと読む)
(もっと読む)
キロポストデータ取得方法及び装置
【課題】本発明の目的は、キロポストの位置情報(緯度及び経度)を簡単に求めることができる方法を提供することにある。
【解決手段】車両にて高速道路を走行中に、GPS信号から得た緯度及び経度より1秒毎の移動距離を計算し、その積算値Siを計算する。GPS信号の受信毎に、0.1秒毎の移動距離ΔLを計算し、その積算値Lsを計算する。1秒毎の移動距離の積算値Siと0.1秒毎の移動距離の積算値Lsの合計値SUMiを計算し、それがデータ取得開始点から測定対象のキロポストまでの距離を超えたとき、その合計値SUMiに対応する緯度及び経度を計算する。計算した緯度及び経度を測定対象のキロポストの位置情報として保存する。
(もっと読む)
881 - 890 / 1,802
[ Back to top ]