
国際特許分類[G01S5/14]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 2またはそれ以上の方向線,位置線測定を座標づけすることによる位置決定;2またはそれ以上の距離測定を座標づけすることによる位置決定 (2,996) | 電波を使用するもの[1,2010.01] (2,630) | 互いに離れた複数個の既知位置の点からの絶対距離の測定によるもの (1,802)
国際特許分類[G01S5/14]に分類される特許
781 - 790 / 1,802
位置情報取得装置、位置情報取得方法、および、端末装置用プログラム
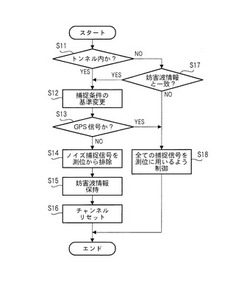
【課題】帯域内ノイズの影響を軽減して測位解の精度改善を実現する。
【解決手段】第一の条件を満たす信号をGPS信号として捕捉・追尾する信号捕捉追尾手段と、該捕捉・追尾された追尾信号を用いて測位を行い、該移動体の位置情報を算出する位置情報算出手段と、該算出された位置情報に基づいて該移動体が所定の場所に位置するか否かを判定する移動体位置判定手段と、移動体位置判定手段により該所定の場所に位置すると判定されるときに、GPS信号を捕捉・追尾するための条件を該第一の条件と異なる第二の条件に変更する捕捉追尾条件変更手段とを具備し、信号捕捉追尾手段が、移動体位置判定手段により該所定の場所に位置すると判定されている期間中、該第二の条件に基づいて信号捕捉・追尾を行う位置情報取得装置を提供する。
(もっと読む)
車載用ナビゲーション装置及び車両進行方向検出方法

【課題】バック信号を取得するためのアダプタ等の特別なハードウェアを必要とせずに、バック信号を取得できない場合であっても自車の進行方向を正しく判定可能とし、自車位置精度の向上に寄与することができる「車載用ナビゲーション装置及び車両進行方向検出方法」を提供すること。
【解決手段】衛星航法及び自立航法を利用した各測位機能を併用して自車位置を決定する車載用ナビゲーション装置において、自立航法による測位機能に基づき検出した車速と、衛星航法による測位機能に基づき検出したGPS方位をモニタし、該車速がしきい値以上になったときに自車は「前進」していると判定し(S3,S4)、該車速がしきい値未満でGPS方位の変化量がしきい値以上になったときに、自車は「前進」から「後進」に、あるいはその逆の状態に切り替えられたものと判定する(S6,S7)。
(もっと読む)
測位システム、探知装置、測位装置、測位システムの測位方法、探知装置の探知方法、測位装置の測位方法、探知装置の探知プログラムおよび測位装置の測位プログラム
【課題】目標物を測位するために探知装置と測位装置との間で必要な通信帯域を少なくする。
【解決手段】基準信号送信装置120が目標10に向けて送信波30を発信し、各探知装置100は送信波30が目標10で反射した反射波32を受信する。各探知装置100は受信した反射波32に基づいて基準信号送信装置120が送信波30を送信してから探知装置100が反射波32を受信するまでの時間を算出し、算出した時間のみを特徴情報として測位装置140に送信する。測位装置140は各探知装置100から受信した各特徴情報に基づいて基準信号送信装置120から目標10を経由した各探知装置100までの距離を算出し、算出した距離と基準信号送信装置120の座標と各探知装置100の座標とに基づいて目標10の位置を測位する。
(もっと読む)
受信装置および受信制御方法
【課題】使い勝手がよく、しかも小型化が可能な受信装置を提供する。
【解決手段】GPS衛星のアルマナック情報を衛星データROM6に記憶しておき、使用開始時点では、それをSRAM7へ転送することにより、アルマナックデータの取得作業を廃止する。また、衛星データROM6内のデータが無効となった場合には、それを示すフラグをEEPROM12のフラグ領域12bに書き込み、使用を中止する。同時に、GPS部3により新たなアルマナック情報を取得し、それをEEPROM12の衛星データ記憶領域12aに記憶するとともに、以後は、そのデータを使用する。アルマナック情報の保持に必要な二次電源が不要となる。また、GPS部3の受信動作終了後には、エフェメリスが有効な所定時間だけ主電源からSRAM7へ電力を供給し、その後は電源を遮断する。
(もっと読む)
車両位置検出システム
【課題】本発明は、車両位置をより高精度で検出できる車両位置検出システムを提供することを課題とする。
【解決手段】自車の位置を検出することができる車両位置検出システム10において、自車に搭載され、GPS衛星からのGPS信号を受信するGPS受信部12と、自車に搭載され、交差点手前に配置される光ビーコンからの光ビーコン情報を受信する光ビーコン通信手段14と、自車に搭載され、光ビーコン通信手段14で光ビーコン情報を受信したら、この光ビーコンの情報に基づいて自車の位置を補正する中央処理装置19とを備えている。
(もっと読む)
絶対位置算出装置、及びその絶対位置算出方法
【課題】
GPSを用いた測位手段において、従来よりも、精度を向上させた絶対位置の算出、位置計測のを行うことを課題とする。
【解決手段】
3台のGPS受信機とアンテナを用いて、絶対位置の算出、位置計測するものとする。
先ず、3台のGPS受信機を用いて、それぞれの計測地点で、GPS衛星からのデータを取得する。
そして、3台のうちで、予め定めた2台の計測地点間の距離を拘束条件としフィルタリング処理を行い、絶対位置の算出を行うものととする。
上述の絶対位置の算出、位置計測を行うことによって、従来よりも精度を向上させた絶対位置の算出、位置計測を可能とするものである。また、計測時間の短縮化を図ることも可能とするものである。
(もっと読む)
測位装置および測位方法
【課題】受信機時計誤差による影響を抑圧して受信機位置を推定する単独測位装置および単独測位方法を提供する。
【解決手段】入力された各観測値、すなわち、選定された各GPS衛星に対するL1波のキャリア位相、L2波のキャリア位相、C/Aコードのコード擬似距離、PYコードのコード擬似距離、時計誤差情報、電離層遅延情報、対流圏遅延情報を目的変数とし、整数値バイアス、および受信機位置を説明変数に含む線形回帰方程式を構成する。この際、従来時計誤差に含まれていた搬送波信号毎、コード毎の受信機バイアスを時計誤差から分離して線形回帰方程式に加える。そして、この線形回帰方程式に最小二乗法を適用させて、整数値バイアスと受信機位置とを推定演算する。
(もっと読む)
自動車の走行制御システム、および、車両制御装置
【課題】車両制御のために、地物を早い時期に高精度で認識すること。
【解決手段】車両制御装置100は、車両10の周辺の地物を認識して道路環境の情報を取得する第1の道路環境情報取得手段と、前記第1の道路環境情報取得手段で認識した地物とは異なる地物を認識して道路環境の情報を取得する第2の道路環境情報取得手段と、前記第1の道路環境情報取得手段により取得した第1の道路環境情報と前記第2の道路環境情報取得手段により取得した第2の道路環境情報に応じて自車前方の道路環境を認識する道路環境認識手段と、を有することを特徴とする。
(もっと読む)
GPS距離測定装置
【課題】所望する2点間の距離を容易に測定することができるGPS距離測定装置を実現する。
【解決手段】GPS距離測定装置1は、ユーザが所望する距離測定に応じた測定開始点と測定終了点とを現在位置指示部5aによりそれぞれ指し示した状態で操作ボタン6が操作されて、その測定開始点と測定終了点とを指定することによって、その測定開始点と測定終了点とがそれぞれ指定されたタイミングに対応し、GPSセンサ5により受信されたGPS信号に基づく位置データをそれぞれ取得することができ、その取得したGPS信号に基づく測定開始点に関する位置データと、測定終了点に関する位置データとに基づいて、測定開始点と測定終了点の間の距離を算出して表示パネル4に表示する。
(もっと読む)
車両走行動揺/騒音解析システム、車両走行動揺/騒音解析方法、車両走行騒音解析システムおよび車両走行騒音解析方法
【課題】鉄道車両の走行試験において動揺測定値および/または車内騒音測定値を高い位置精度または距離精度で正確に得ることができ、しかも計測者に負担をかけることなく、低コストで試験を行うことができる車両走行動揺/騒音解析システムを提供する。
【解決手段】軌道上を走行する車両の前後方向、左右方向および上下方向の振動加速度を検出する3軸加速度センサー11と騒音計12とGPSアンテナ13およびGPS受信機14とを車両に設置し、GPSアンテナ13によりGPS受信機14が受信する信号により取得される位置情報と3軸加速度センサー11により検出される車両の前後方向の加速度とに基づいて車両の位置情報を補正するとともに、車両が駅に停止している時に計測者により入力される駅停止信号および/または車両が構造物を通過する時に計測者により入力される構造物信号により車両の位置情報を補正する。
(もっと読む)
781 - 790 / 1,802
[ Back to top ]