
国際特許分類[G01S5/14]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 2またはそれ以上の方向線,位置線測定を座標づけすることによる位置決定;2またはそれ以上の距離測定を座標づけすることによる位置決定 (2,996) | 電波を使用するもの[1,2010.01] (2,630) | 互いに離れた複数個の既知位置の点からの絶対距離の測定によるもの (1,802)
国際特許分類[G01S5/14]に分類される特許
811 - 820 / 1,802
ナビゲーション装置、停止検出方法及び停止検出プログラム
【課題】本発明は、車両100が停止しているときに、車両100が停止していることを確実に検出することができる。
【解決手段】本発明は、GPS信号に基づく位置信号PSからGPS速度を算出し、当該GPS速度から車両100が停止していると認識した際に、車両100に作用する加速度を表す横方向加速度信号SBを検出すると共に、当該横方向加速度信号SBの分散値を車両100の振動を表す横方向加速度分散値DPとして算出し、この横方向加速度分散値DPの平均値を第1の閾値である停止判定閾値SDとして設定することにより、当該横方向加速度分散値DPに基づいて停止判定閾値SDを設定するようにする。
(もっと読む)
グラフィクス・プロセッサによる全地球的航法衛星システムからの信号の処理

全地球的航法衛星システム(「GNSS」)からの信号を処理するプログラム可能グラフィクス・プロセッサは、ラスタライザ・ユニットと、ピクセル・シェーダー・ユニットと、メモリ・ユニットを有している。GNSS衛星受信信号は、受信信号のデジタル化された形式に変換され、プログラム可能グラフィクス・プロセッサによって変換されるが、このとき、前記デジタル化された形式の信号の対応データのアレイは、メモリ・ユニットに保存され、ピクセル・シェーダー・ユニットによって演算処理が行われ、結果アレイが形成されて、メモリ・ユニットの第1アドレスに書き込まれる(図3参照)。デジタル化された形式の信号の対応データのアレイの終点の第1アドレスと値は、ラスタライザ・ユニットに供給される。ラスタライザ・ユニットは、アレイの終点の値の間に値を補間する。アレイの終点の値と補間値は、デジタル化された形式の信号の対応データのアレイのメモリ・ユニット内のアドレスに対応している。 (もっと読む)
位置情報端末及び位置管理センタ
【課題】
GPS測位方式とRFIDによる位置情報を組み合せ、状況に応じた適切な測位方式で正確な位置を取得可能な位置情報端末及び位置管理センターを提供する。
【解決手段】
位置情報端末は、RFタグの情報を読み取るRFリーダと、GPS信号の受信及び管理センタとの送受信を行う無線通信部と、GPS信号に基づいて現在位置の算出を行うGPS測位手段と、RFリーダーによりRFタグの情報を受信できない場合に、GPS測位手段により自己の位置情報を取得する位置情報取得制御部とを具備する。位置管理センタは、管理区域の各所に設置されたRFタグのID情報とRFタグの設置位置情報を関連づけて記憶したRFタグ位置記憶部と、対象者が所持する位置情報端末と通信する通信部と、位置情報端末よりRFタグのID情報を受信するとRFタグ位置記憶部を参照してRFタグの位置情報を位置端末の位置情報として特定する位置算出部とを具備する。
(もっと読む)
ナビゲーション装置、ナビゲーション制御方法及びナビゲーション制御プログラム
【課題】本発明は、衛星からの信号を受信できないときであっても、信頼性の高い高精度な移動体の現在位置を提示できるようにする。
【解決手段】本発明は、衛星からの信号を受信していたときに予め学習しておいた加速度センサの移動体に対する取付角度の学習程度が高ければ、その学習結果を用いた推定した自律速度の信頼性が高いと考え、その自律速度をナビゲーション動作に用い、学習程度が低ければ自律速度の信頼性が低いと考え、その自律速度を用いるのではなく、衛星からの受信情報に基づいて算出された移動体の走行速度をナビゲーション動作に用いるように切り換えることができるので、ナビゲーション動作の信頼性を一段と向上させることができる。
(もっと読む)
測位方法及び装置
【課題】本発明の目的は、電波航法において加減速や方向転換するなどの移動局に動きの変化があったり、基準局から移動局への補正情報や観測データの送信遅延があったとしても、移動体の現時刻の位置を高精度に測位することを可能にすることである。
【解決手段】測位情報を発信する衛星の信号から、衛星の軌道情報、現時刻の搬送波位相を検出し、位置が既知である基準局で観測時刻に観測された搬送波位相と、衛星の軌道情報に基づき算出した観測時刻と現時刻における衛星の位置、観測時刻における基準局での搬送波位相をもとに、現時刻における基準局での一重位相差または現時刻における基準局での受信機クロック誤差及び搬送波位相を予測し、移動局の搬送波位相、予測された基準局の一重位相差あるいは搬送波位相及び衛星位置をもとに、移動局の位置を算出する。
(もっと読む)
電力制御を備えるRF−ベースバンド間のシリアル・インターフェース
【課題】衛星測位信号を処理する信号処理システムが述べられる。
【解決手段】この信号処理システムは、少なくとも1つのプロセッサと、いくつかの動作モードのもとに動作する信号処理装置とを含む。この信号処理装置は、これらの動作モードに応じて、それぞれ動的に、かつ独立して構成できる信号処理サブシステム、高速フーリエ変換(FFT)サブシステム、メモリ・サブシステムのうちの少なくとも1つを含む。さらに、この信号処理装置は、メモリ・サブシステムを介して、信号処理サブシステムとFFTサブシステムの間でデータを転送する動作を制御するために結合しているコントローラも含む。メモリ・サブシステムを構成できることは、これらの動作モードに従って、上記メモリ・サブシステムを構成して、いくつかの領域を形成し、それぞれの領域に、それらの動作モードにより、いくつかのやり方の1つでアクセスできるようにすることを含む。
(もっと読む)
走行位置検知装置
【課題】移動体の接地位置を高精度に検知する。
【解決手段】走行位置検知装置10は、GPS電波受信アンテナ11により受信したGPSデータに基づいて装置本体の位置を示す「GPS位置データ」を一定時間毎に算出するGPS位置測位処理部12と、装置本体の路面に対する傾斜データを検出するための傾斜センサ15と、“前回のGPS位置データ”が算出されてから“新たなGPS位置データ”が算出されるまでの間、前回の位置データからの移動距離を求めて装置本体の位置を示す「自律位置データ」を一定時間毎に算出する自律位置測位処理部17と、位置データに対して路面の傾きを補正して、移動体5の接地位置データを算出する接地位置算出部18とを備える。
(もっと読む)
観測装置、土地地盤変位監視システムおよびアンテナ装置
【課題】人や車両の通行を妨げたり、景観を損ねたりすることのない、観測装置および当該観測装置を用いた土地地盤変位監視システムを提供する。
【解決手段】土地地盤変位監視システム1は、高速道路15の路側帯16上の各測定点に埋め込まれた測定点観測装置10と、位置が既知である基準点に設置された基準点観測装置11と、監視装置12とから構成される。測定点観測装置10は舗装部19に固定されている。測定点観測装置10と基準点観測装置11とは、GPS衛星21からの電波を受信し、電波の搬送波の位相に関するデータ等を求める。監視装置12は、測定点観測装置10と基準点観測装置11とから受信した位相に関するデータ等から基準点に対する測定点の相対位置を求め、さらに相対位置の変化から測定点の土地地盤変位を検知する。
(もっと読む)
所在及び在庫追跡のための過去エラー自動補正
【解決手段】貨物船上又はコンテナ置場内に保管されているコンテナの所在を追跡し、在庫を維持するためのシステムが提供されている。システムは、GPSやINSセンサの様なリアルタイム位置情報を入手するための1つ又は複数のセンサ、並びに、リアルタイム位置信号が遮断され又は信号に歪が生じた場合などに失われたデータを回復させると共に間違いのあるデータを補正するための事後処理を自動的に提供することができるように構成されたプロセッサを含んでおり、事後処理は、軌道を推定し、所在エラーを補正することによって行われる。事後処理測位技法は、記憶されている位置データに継続的に適用され、較正された位置の所在を反復的に求めて、較正された第2軌道区間をリアルタイムで提供する。次いで、較正された第2軌道を使用して、それが統計学的に信頼できるものになった時点で、過去のリアルタイム位置データ内のエラーが識別される。データベースに記憶されている在庫所在に自動的に補正が加えられ、コンテナについての位置エラーが補正される。 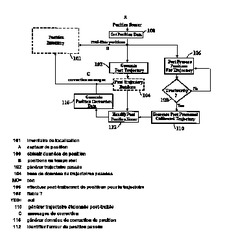 (もっと読む)
(もっと読む)
ナビゲーション装置、ナビゲーション処理方法及びナビゲーション処理プログラム
【課題】本発明は、信頼性の高い位置情報を提供することができる。
【解決手段】本発明は、所定の算出方法に従って自律速度VEを算出するとき、当該算出方法に基づき初速度Vaの誤差範囲を用いて自律速度VEに対する誤差範囲を算出することにより、当該算出方法が有する特性を自律速度VEに対する誤差範囲に反映させる。さらにナビゲーション装置1は、この自律速度VEの誤差範囲に基づいて進行距離DTに対する誤差範囲を算出し、この進行距離DTの誤差範囲に基づいて進行距離DTの信頼性を判定すると共に、信頼性の判定された進行距離DTに基づいて車両100の現在位置を算出するようにする。
(もっと読む)
811 - 820 / 1,802
[ Back to top ]