
国際特許分類[G01S5/16]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 2またはそれ以上の方向線,位置線測定を座標づけすることによる位置決定;2またはそれ以上の距離測定を座標づけすることによる位置決定 (2,996) | 電波以外の電磁波を使用するもの (114)
国際特許分類[G01S5/16]に分類される特許
101 - 110 / 114
GPS衛星用基準局システム

【課題】 高高度移動体の位置決定に影響する周囲環境等の排除を図る。
【解決手段】 3つのレーザ測距基地局16a等からGPS衛星用基準局12の再帰反射体14に向けて測距用レーザを放射し、その測距用レーザの再帰反射により各レーザ測距基地局16a等に到達した測距用レーザを検出してレーザ測距基地局毎のレーザ測距基地局16a等と再帰反射体14との間の距離を算出し、これら3つの距離に基づいて再帰反射体14の位置を決定し、そしてこの位置と、再帰反射体14とGPS受信アンテナ20との相対的な位置と、姿勢センサ22の姿勢情報とに基づいてGPS受信アンテナ20の位置を決定する。
(もっと読む)
身体内における器具の位置を特定するための装置及び方法
本発明は、身体(106)内における例えばカテーテルのような器具の位置を特定するための装置及び方法に関する。カテーテル(104)は、多数の光ガイドを持ち、そのガイド内にレーザ(101)からのNIR放射パルス(102)が通される。このNIR放射パルスは、光ガイドの終端部(105)を散乱させることにより身体ボリューム(106)内に放出され、カメラ(107a、107b、107c)を用いて身体の外側において検出される。散乱した光子は好ましくは時間的に選択した増幅を用いて除外される。カテーテルの位置は、これらカメラの画像に基づいて立体的に復元されることができる。  (もっと読む)
(もっと読む)
位置検出の方法及び装置

【課題】精度よく空間内での位置検出を行うことにある。検出した位置情報は、測定される側の物体(小型端末、ロボット、センサーノード等)が取得する。
【解決手段】位置情報を送信する赤外線送信装置を配置し、対象物にとりつけた赤外線受信装置で位置情報を取得する。赤外線送信装置は、照射方向によって異なる情報を発信し、対象となる空間を分割する。空間をより細かく分割するためには、高密度可動鏡面デバイスを用いるのことが有効であり、高精細でありながら信号同士の重なりが少ない照射ができる。尚この装置は、既存の画像表示用プロジェクター(高密度可動鏡面デバイス使用)とほぼ同じ構成で実現できる。この装置を複数台もちいることで、3次元の位置特定も可能になる。
(もっと読む)
位置特定システム
【課題】 光源からの光信号を利用することにより、屋内外を問わず物体の位置を特定することが可能な位置特定システムを提供する。
【解決手段】 予め定めた固定位置に設置されて固有の識別情報ID1〜ID3を含む光信号を投光する光源ユニット1〜3と、光信号を受光して受光出力を発生する受光部11、受光出力から識別情報ID1〜ID3を抽出して光源ユニット1〜3を識別し、識別した光源ユニット1〜3と自身(物体10)との間の位置関係として距離を計算する位置関係計測部20、及び、地図データベース31に記憶された光源ユニット1〜3の位置情報と位置関係計測部20の情報から自身(物体10)の位置を特定する位置特定部30を有する物体10とを備える。
(もっと読む)
電波及び光方式3次元測位システム
電波及び光方式3次元測位システム(10)が開示されている。このシステムは、据え置き型で一体型の自己位置測位電波送受信機/レーザ送信機(RTR_LT)(12)と、可搬型で一体型の電波受信機/レーザ検出器(RR_LD)(14)とを備えている。RTR_LT(12)は、第1の複数の外部電波信号を受信し、受信した第1の複数の外部電波信号に基づいて自身の位置座標を決定し、少なくとも1つの内部電波信号を発信し、かつ少なくとも1本のレーザビームを発信するように構成されている。RR_LD(14)は、第2の複数の外部電波信号を受信し、RTR_LT(12)が発信する少なくとも1つの内部電波信号を受信し、RTR_LT(12)が生成する少なくとも1本のレーザビームを検出し、受信した第2の複数の外部電波信号、受信した少なくとも1つの内部電波信号、及び検出した少なくとも1本のレーザビームから成る群から選択された1組のデータに基づいて、自身の3次元位置座標を決定するように構成されている。 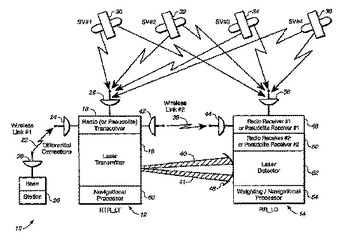 (もっと読む)
(もっと読む)
弾丸位置計測装置
【課題】 計測領域の広さ及び計測できる弾丸の種類が制限され難くい弾丸位置計測装置を提供する。
【解決手段】 射撃の目標となる標的11への射撃を行う側に弾丸8の弾道tと交わる方向の平たい幕状の光を照射し、予め設定した間隔で離して設置される複数の光発生器3a−3g、光発生器3a−3gの発光を制御する発光制御部7、複数の光発生器3a−3gと対向する位置に、複数の光発生器3a−3gが並ぶ方向で、光発生器3a−3gで形成する幕状の光に対応して延在する受光器5、受光器5からの出力信号に基づいて、少なくとも2つの光発生器によって形成される幕状の光が重なり合う領域に対応する計測領域13を通過する弾丸8の位置を演算する弾丸通過位置演算部9とを備え、発光制御部7は、形成される幕状の光が重なり合わないように、複数の光発生器3a−3gのうち1つ以上の光発生器を順番に繰り返し発光させる構成とする。
(もっと読む)
ロボットシステム
【課題】 外部環境に影響されずに、ロボットの位置を正確に認識でき、システムの構成に必要とする費用を最小化できるロボットシステムを提供すること。
【解決手段】 本発明は、位相情報を有する光を送出する光送出部と、超音波を送出する超音波送出部を有する位置情報送出ユニットと;前記光を受信する光受信部と、前記超音波を受信する超音波受信部と、前記光受信部を通じて受信した前記光の前記位相情報と前記超音波受信部を通じて受信した前記超音波と、に基づき、前記位置情報送出ユニットに対する相対位置を測定する位置測定部を有するロボットと;を含むことを特徴とする。これにより、外部環境に影響を受けることなく、ロボットの位置を正確に認識できて、システムの構成に必要とする費用を最小化できる。
(もっと読む)
移動体位置等推定検出方法、装置及び移動体位置等推定検出方法のプログラム
【課題】 より高精度に移動体の位置等を推定検出することができる方法及び装置を提供する。
【解決手段】 電界を直交3軸方向の各成分で検知する電界検知器1と、電界検知器1が検知した信号を電界のデータとして時系列に記録するデータ収集器5と、電界のデータの値が点電流源に係る電界の理論式を満足するように、あらかじめ定めた収束条件を満たすまで、残差を用いた最小自乗法による反復計算を行ってパラメータの値を決定し、決定したパラメータの値に基づいて移動体の現在、将来の位置等の推定検出をする位置等推定検出器6とを備えた。
(もっと読む)
測位システムおよび測位方法、測位装置およびそのプログラムならびに記録媒体
【課題】 対象物の位置を検出すると共に、その向きを検出することが出来る測位システムを提供する。
【解決手段】 発信装置2がIDを無線信号により所定の間隔で発信し、第1LEDが所定の間隔で発光し、第2LEDが第1LEDが発光した時刻から所定の間隔が経過するまでの間の時刻で発光する。そして測位サーバ1が、発信装置2を測位する対象時刻の入力に基づいて、第1LEDが発光する時刻と第2LEDが発光する時刻の時間間隔で撮影された2つの撮影画像を特定し、その特定した2つの撮影画像における2つのLEDが発光するそれぞれの座標と、時間間隔とに基づいて、発信装置2の向きを検出する。
(もっと読む)
位置検出装置および被検体内導入システム
【課題】所定の位置検出用磁場を用いてカプセル型内視鏡等の検出対象の位置検出を行う技術に関して、必要かつ充分な位置検出用磁場を形成することが可能な位置検出装置を実現する。
【解決手段】位置検出装置は、それぞれ検出対象が位置しうる領域の一部において検出可能な、位置検出用磁場としての第2直線磁場を形成する第2直線磁場形成部10a〜10dと、所定の処理機構を備えた処理装置12とを備える。処理装置12は、記録部43に記録された検査対象の第1時刻における位置に基づき、第1時刻から所定時間だけ経過した第2時刻における位置検出の際に、第2直線磁場の形成に最も適した位置を選択する位置選択部49と、位置選択部49によって選択された位置に基づき、第2直線磁場形成部10a〜10dの中から対応するものを駆動させる駆動制御部50とを備える。
(もっと読む)
101 - 110 / 114
[ Back to top ]