
国際特許分類[G01S5/16]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 2またはそれ以上の方向線,位置線測定を座標づけすることによる位置決定;2またはそれ以上の距離測定を座標づけすることによる位置決定 (2,996) | 電波以外の電磁波を使用するもの (114)
国際特許分類[G01S5/16]に分類される特許
71 - 80 / 114
移動体位置検出システム
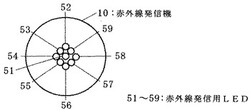
【課題】赤外線を用いた位置検出において、位置検出精度の向上を図るためには、赤外線発信機から照射される赤外線照射範囲を狭くする必要があり、一方、位置検出精度の向上をさせるためには、赤外線発信機の設置個数を増やさなければならない。
【解決手段】赤外線発信機10は9つの赤外線発信用LED51〜59を備え、赤外線発信用LED51〜59は、それぞれが異なる位置IDデータを移動体に照射する。赤外線照射範囲は重複を回避するように定め、赤外線発信用LED51〜59の照射タイミングもずらせる。これにより、1つの赤外線発信機10からの赤外線照射範囲内を9つに分割し、移動体の詳細な位置検出を可能とすることが可能となる。
(もっと読む)
光波距離測定方法、距離測定プログラム及び距離測定システム

【課題】同時に多数の測定対象物について、多数回の距離測定を可能とし、又近接した測定対象物についても距離測定を可能とする。
【解決手段】測距光として所定の広がり角を有するパルスレーザ光線を複数の測定対象物11a,11b,11cに向け射出する複数の距離測定装置71と、前記複数の測定対象物についてそれぞれ複数の測距結果に基づき各測定対象物の座標を演算する演算処理装置72とを具備し、前記距離測定装置は、既知点に設置され、所定の広がり角を有するパルスレーザ光線を発する光源部と、1以上の測定対象物からの反射光を受光する受光部と、該受光部からの受光信号を基に前記測定対象物それぞれについての距離を演算する制御演算部とを具備し、前記演算処理装置は各距離測定装置から演算された測定対象物迄の距離データを取得し、該測定対象物それぞれについて複数の距離データ、既知点の位置から測定対象物の座標位置を演算する。
(もっと読む)
方向検出装置および移動体位置特定装置
【課題】屋外の外乱光による影響を避けて屋外に設けられた投光機器の方向を正確に検出できるようにした方向検出装置を提供することにあり、光通信方式を適用して移動体の位置を正確に特定できるようにした移動体位置特定装置を提供する
【解決手段】複数のフォトダイオードが、互いに異なる指向性特性を有するように配設されており、当該フォトダイオードが受光した受光信号に含まれるデータ信号成分の大小に応じて路上通信機2の方向(路上通信機2からの受光方向)を検出する。
(もっと読む)
位置検出システムおよび位置検出装置
【課題】 位置検出に最適な3つの光を適切に選ぶことができ、これにより移動体の位置を精度よく検出することが可能な信頼性にすぐれた位置検出システムおよび位置検出装置を提供する。
【解決手段】 2次元光学センサ32の受光面における中心点Oからなるべく離れたところの3つの集光点Dの位置を自己位置検出用として選択する。
(もっと読む)
位置検出システム
【課題】 光学ビーコン相互間で光の受け継ぎができない状態になっても受け継ぎを繰り返すことで一時的な障害物に対処しシステムの発光リレー動作の信頼性を向上する。
【解決手段】 光学ビーコン#2は光学ビーコン#1からの発光パターン光を受光すると、IDコード「2」を含む自己の発光パターン光の発光を開始する。そして、光学ビーコン#3からの発光パターン光を受光できないときには、所定時間経過後に2回目の発光パターン光の発光を開始する。そして、2回目の発光パターン光の発光したときに、光学ビーコン#3が光学ビーコン#2の発光パターン光を受光すると、光学ビーコン#3はIDコード「3」を含む自己の発光パターン光の発光を開始する。また、光学ビーコン♯2は光学ビーコン#3の発光パターン光を受光し、発光が光学ビーコン♯3に伝達されたとして発光パターン光の繰り返し発光動作を行わない。
(もっと読む)
位置検出システム
【課題】移動体に対する面倒な校正登録作業を不要にするとともに移動体を小型化し、しかも、消費電力の低減化、位置検出精度の向上を図る。
【解決手段】移動体の移動空間に分散して設けられ、自己の識別情報と位置検出信号を含む発光パターンに基づいて所定の発光順序で発光する複数の光学ビーコン#0〜#6と、移動体に設けられ、各光学ビーコンからの光の発光パターンに含まれる識別情報から少なくとも3つの光学ビーコンを識別するとともに、この識別した各光学ビーコンからの光の発光パターンに含まれる位置検出信号から光の方向を検出し、この検出結果に基づいて移動体の位置を検出する検出手段を備え、各光学ビーコンは、位置検出信号の発光エネルギーを自己の識別情報の発光エネルギーに比べて高めている。
(もっと読む)
多数のセグメントからなる物理的構造の寸法の不変性を組立の間に確保するための方法
本発明は、多数のセグメントからなる物理的構造、特に航空機構造の寸法の不変性を組立の間に確保するための方法に関する。この方法は、以下の工程を有する。後に組み立てられる物理構造を収める空間的に固定された3次元の座標系(90)が構成され、組み立てられる前記物理構造の複数のセグメント(31,32,33)が前記空間的に固定された3次元の座標系(90)に導入され、前記空間的に固定された3次元の座標系(90)内での個々の前記セグメント(31,32,33)の位置及び既に組み立てられたセグメント(31,32,33)のグループの位置が組立の間に繰り返し記録され、そして、セグメント(31,32,33)の夫々の位置又は既に組み立てられたセグメント(31,32,33)のグループの夫々の位置が、所望の寸法の不変性に従って夫々の所定の公称値によって予め決定された許容誤差幅の外にあることを夫々の記録が示すならば、セグメント(31,32,33)の夫々の位置又は既に組み立てられたセグメント(31,32,33)のグループの夫々の位置が修正される。 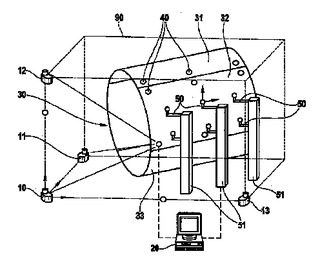 (もっと読む)
(もっと読む)
複数の方位線からの物体の位置特定の方法及び装置
物体の場所を求める方法は、複数の観測場所からの物体の方位を表すデータを使用する。この方法は、(a)方位毎に、手順を使用して点の座標を導出することであって、この座標は、所定の場所とその方位線上の最も近い点との間の符号付き距離を表す第1の値pと、その方位線の角度を表す第2の値θとを含み、上記手順に従って、反対方向の同一直線上の方位が、互いに符号が反対である第1の値と、互いにπだけ異なる第2の値とを有する、導出すること、及び、(b)上記点を曲線フィッティングすることを規定するパラメータを導出することであって、当該パラメータは物体の場所を表す、導出することを含む。方位測定に関連付けられる信号対雑音比を表す値と、互いに対して相対的な観測場所を表す値及び物体に対して相対的な観測場所を表す値とを使用して、物体の場所の計算に対するそれらの影響を重み付けする目的で方位をグループ化することができる。  (もっと読む)
(もっと読む)
位置算出装置、位置算出プログラム、ゲーム装置、およびゲームプログラム
【課題】撮像装置が搭載された入力装置と撮像対象との距離の算出を行うとき、撮像対象に対して撮像装置が斜めを向いていても位置関係の算出を可能とする位置算出装置、位置算出プログラム、ゲーム装置、およびゲームプログラムを提供する。
【解決手段】位置算出装置は、第1および第2の撮像対象を撮像するための撮像装置と、その撮像対象との位置関係を算出する。位置算出装置は、撮像装置の撮像画像において第1の撮像対象を示す対象画像の大きさを示す第1のサイズと、その撮像画像において第2の撮像対象を示す対象画像の大きさを示す第2のサイズとを取得する。そして、位置算出装置は、第1および第2のサイズに基づいて、撮像装置と撮像対象との位置関係を算出する。
(もっと読む)
移動ロボットの位置計測方法及び位置計測システム
【課題】光信号発信機に異常が発生しても適切に位置計測しながら移動することか可能な移動ロボットの位置計測方法及び位置計測システムを提供すること。
【解決手段】複数の光信号発信機から位置計測用の光信号が発信され、移動ロボットがその光信号を受信して自己の位置を計測しながら移動するものであって、複数の光信号発信機から発信された光信号を所定の固定位置で受信し、所定数の光信号発信機の組み合わせを変更しながら各組み合わせの光信号に基づいて当該固定位置の位置計測を行い、その位置計測によって得られた各組み合わせによる固定位置の位置座標を予め記憶された当該固定位置の原座標と比較して移動ロボットの位置計測に利用する光信号発信機を選択し、その選択された光信号発信機から発信された光信号を利用して移動ロボットが自己の位置計測を行うようにした移動ロボットの位置計測方法。
(もっと読む)
71 - 80 / 114
[ Back to top ]