
国際特許分類[G01S5/16]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 2またはそれ以上の方向線,位置線測定を座標づけすることによる位置決定;2またはそれ以上の距離測定を座標づけすることによる位置決定 (2,996) | 電波以外の電磁波を使用するもの (114)
国際特許分類[G01S5/16]に分類される特許
51 - 60 / 114
移動体配置計測システム及び移動体搭載システム
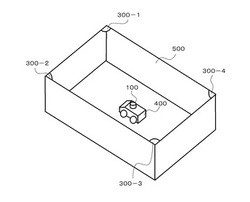
【課題】簡易に移動体の配置を計測することが可能な移動体配置計測システム及び移動体搭載システムを提供する。
【解決手段】自律走行ロボット400に配置された通信装置100が全外周にわたって問い合わせ信号に対応する光を発光すると、当該光を受光した信号発生装置300は、自身の固体番号を含んだ識別信号に対応する光を発光する。そして、この光は、通信装置100によって受光され、当該通信装置100に接続された計測装置200は、問い合わせ信号に対応する光と、識別信号に対応する光のそれぞれの初受光の時間と、識別信号に対応する光の到来方向とに基づいて、自律走行ロボット400の位置及び方位や、自律走行ロボット400からの信号発生装置300の方向を計測する。
(もっと読む)
自律移動体,自律移動体制御システムおよび自律移動体の自己位置推定方法

【課題】周囲の環境に対する自己位置の相対的な位置情報が十分得られない環境においても、簡単に自己位置を精度よく認識することができる自律移動体、自律移動体制御システム、および自律移動体の自己位置推定方法を提供すること。
【解決手段】自律移動体において、移動体本体の自己位置候補を算出する自己位置候補算出部と、前記算出された自己位置候補に基づいて推定自己位置を認識する自己位置認識部と、固有のID信号を含む赤外線を照射する赤外線照射部から照射された赤外線を検出する検出部とを設けるとともに、自己位置認識部において、検出部で検出した赤外線に関する情報に基づいて自己位置候補算出部により算出した自己位置候補を修正し、修正後の自己位置候補を推定自己位置として予め記憶した移動マップ上において認識する。
(もっと読む)
位置検出装置、車両及び位置検出方法
【課題】送信部から発せられた赤外線について、道路上における光強度の分布が不均一であっても、この送信部との相対位置を精度良く求めることのできる位置検出装置を提供する。
【解決手段】位置検出装置は、送信部から発せられる赤外線を受光する受光素子7a,7bを複数有している。これら受光素子7a,7bでの赤外線の到達光の光強度が同一である場合に、その到達光の入射角度に応じて検出レベルに差が生じるように、受光素子7a,7bは設けられている。これら受光素子7a,7bがそれぞれ赤外線を受光する位置における到達光の光強度の比を求める。受光素子7a,7bの検出レベルを用いて入射角度を前記光強度の比によって補正して求める。この入射角度、並びに、受光素子及び送信部の高さ情報に基づいて送信部との相対位置を求める。
(もっと読む)
路車間通信システム及び路車間通信方法とこれに用いる車載機及び車両
【課題】 車両にピッチ方向の傾きが生じていても、ドライバに対する安全運転支援を精度よく行うことができる路車間通信システムを提供する
【解決手段】 本発明の路車間通信システムは、道路Rを走行する車両の車載機2と、道路Rの所定範囲に通信領域Aが設定された投受光器8を有する光ビーコン4とを備え、通信領域Aにおいて車載機2と光ビーコン4の投受光器8との間で光信号による双方向通信を行うシステムである。光ビーコン4は、アップリンク情報35の送信時における車両Cの走行位置と対応する始点位置P1〜P4から、その下流側の所定位置P0までの距離L1〜L4に関する距離情報を含むダウンリンク情報36を、投受光器8に送信させる通信制御部7を有する。また、車載機2は、アップリンク情報35の送信時における車両Cのピッチ方向の傾きを検出する傾き検出手段33と、検出された傾きに基づいて距離情報を補正して距離L1〜L4を求める距離認識部30とを有する。
(もっと読む)
方向特定システム
【課題】端末装置の現在地及び方向を特定する。
【解決手段】各照明器具3では、光源を点灯させて位置情報を含む可視光信号を一定間隔で送信する。端末装置1は、第1の照明器具3aの可視光送信範囲6に入ると、照明器具3aの可視光信号から位置情報を特定する。その後、位置情報及び目的地情報を含む赤外線信号が送信される。第2の照明器具3bでは、4台の赤外線受信部のうち、第1の照明器具3a側に赤外線受信範囲5aを持つ赤外線受信部が赤外線信号を受信する。その後、端末装置1からの位置情報及び目的地情報、並びに上記赤外線信号を受信した赤外線受信部の情報を含む通信信号が制御装置4に送信される。制御装置4では、位置情報と地図情報から端末装置1の現在地を特定し、赤外線信号を受信した赤外線受信部の情報から、端末装置1が第2の照明器具3bの方向を向いていることや、端末装置1の現在地から目的地までのルートも特定する。
(もっと読む)
位置検知装置および位置検知プログラム
【目的】この発明は、周期的に切替えられる複数のアンテナから発信される高周波信号を携帯端末により受信して相対位相を算出し携帯端末の位置あるいは相互間の距離あるいは相互間の方向を高精度で検知するための装置およびプログラムに関するものである。
【構成】基地局1において、複数の指向性アンテナ11a〜11dの間隔を1波長以下として周期的に切替えながら高周波信号を発信し、前記指向性アンテナ11a〜11dの指向性の方向を斜め下方に向けて角度を持たせて設置し、携帯端末2により受信される高周波信号の位相差を測定して携帯端末2の相対的な位置関係を高精度で検知するための計算式を開示する。
(もっと読む)
可視光通信システムを利用した位置測定システム、位置測定装置及び位置測定方法
【課題】可視光通信システムを利用し、容易に実用化を図ることが可能な位置測定システムを提供することにある。
【解決手段】位置情報を可視光信号で発信する可視光通信ビーコンと、1台のカメラにより撮像した画像情報とを使用して、車両1の現在位置を測定する位置測定システムである。可視光通信ビーコンは、道路照明柱3に設けられた道路照明灯30及び可視光通信装置31からなる。車両1は、1台のカメラを搭載し、可視光信号310から可視光通信ビーコンの位置情報を復調して、現在位置を算出する車両位置計測装置10を有する。
(もっと読む)
位置検出装置及び撮影装置
【課題】地下などであっても正確に位置を特定することができる位置検出装置と、その位置検出装置を用いた撮影装置を提供する。
【解決手段】複数の発光源2は、それぞれが設置されている位置を示す位置情報により変調された光が放出されている。その光を光学系11を介してラインセンサ12で受光し、時系列的に得られる1次元のイメージから、位置情報取得部13は発光源2から送られてくる位置情報を復調して取得する。また、各発光源2の光の像が存在するラインセンサ12上の位置も取得する。測定位置特定部14は、各発光源2に対応する位置情報及びラインセンサ12上の位置をもとに、測定位置を特定する。
(もっと読む)
位置情報システム
【課題】 より広い範囲で位置を得ることができる位置情報システムを提供する。
【解決手段】 使用者によって携行される携帯端末1は、複数個の照明器具2からそれぞれ送信されて送信元の照明器具2の位置を示す光信号SLを受信する光受信部11と、GPS衛星からのGPS信号を受信して測位を行うGPS測位部12とをそれぞれ備える。また、表示部13を制御し、光受信部11に受信された光信号SLから得られた位置と、GPS測位部12で得られた位置との一方を表示させる制御部14を備える。携帯端末1が光受信部11とGPS測位部12との一方のみを有する場合に比べ、より広い範囲で位置を得ることができる。
(もっと読む)
構造内の対象物の位置を決定する方法
本発明は、構造内の対象物の位置を決定する方法に関する。対象物は、構造内に配される複数の光源から変調光波を受け取る。変調は個別に符号化され、構造内の光源の位置は既知である。変調信号は同期され、これにより各受け取った変調光波の位相と比較位相との間の位相差の測定に基づいて対象物の位置を決定することが可能である。前記位相差は、距離計算のために用いられ、次に対象物の位置を与える。  (もっと読む)
(もっと読む)
51 - 60 / 114
[ Back to top ]