
国際特許分類[G01S5/16]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 2またはそれ以上の方向線,位置線測定を座標づけすることによる位置決定;2またはそれ以上の距離測定を座標づけすることによる位置決定 (2,996) | 電波以外の電磁波を使用するもの (114)
国際特許分類[G01S5/16]に分類される特許
21 - 30 / 114
位置検出装置

【課題】低コスト且つ分解能が高い位置検出装置を提供する。
【解決手段】位置検出装置は、被検出体から放射される電磁波を感知し、且つ感知領域の一部が互いに重複するように配置された複数の電磁波感知部T1〜T9と、最も強い電磁波を感知した電磁波感知部T1〜T9と感知領域の一部が重複する他の電磁波感知部T1〜T9から出力される信号の大きさを第1の閾値と比較する第1の比較部と、最も強い電磁波を感知した電磁波感知部T1〜T9から出力される信号の大きさと、他の電磁波感知部T1〜T9から出力される信号の大きさとの差を、第2の閾値と比較する第2の比較部と、第1の比較部による比較結果と第2の比較部による比較結果とから、第1の比較部による比較結果と第2の比較部による比較結果との組合わせに応じた分割領域の表を参照して、被検出体が居る分割領域を判定する位置演算部とを備える。
(もっと読む)
光学式位置検出装置

【課題】2つの空間に位置する対象物体の各々の位置を検出することのできる光学式位置検出装置を提供すること。
【解決手段】光学式位置検出装置10には、Z軸方向の一方側Z1に向けて位置検出用光源12が配置され、Z軸方向の一方側Z1に受光部310、320を向けた第1光検出器31および第2光検出器32がZ軸方向で離間した位置に配置されている。第1光検出器31での受光結果から第2光検出器32での受光結果を差し引く等、第1光検出器31での受光結果に対して第2光検出器32での受光結果分を補正すれば、第1空間10R1に位置する対象物体Ob1で反射した検出光の強度を導出することができ、かかる強度の導出結果を利用すれば、第1空間10R1に位置する対象物体Ob1の位置を導出することができる。また、第2光検出器32での受光結果に基づいて第2空間10R2に位置する対象物体Ob2の位置を導出することができる。
(もっと読む)
光学式位置検出装置
【課題】2つの空間に位置する対象物体の各々の位置を検出することのできる光学式位置検出装置を提供すること。
【解決手段】光学式位置検出装置10には、Z軸方向の一方側Z1から他方側Z2に向けて第1検出光L1を出射する第1位置検出用光源121と、Z軸方向の他方側Z2から一方側Z1に向けて第2検出光L2を出射する第2位置検出用光源122とが配置されている。このため、第1位置検出用光源121がZ軸方向の他方側Z2に向けて第1検出光L1を出射した際、第1空間10R1に位置する対象物体Obで反射した第1検出光L1は光検出器30の第1受光素子31で受光される。また、第2位置検出用光源122がZ軸方向の一方側Z1に向けて第2検出光L2を出射した際、第2空間10R2に位置する対象物体Ob2で反射した第2検出光L2は光検出器30の第2受光素子32で受光される。
(もっと読む)
交通情報通信システム、移動端末装置、情報処理装置、アップリンク情報の生成方法及び処理方法、地図データ構造、アップリンク情報のデータ構造
【課題】 オフセット値の基準座標をアップリンク情報に含めなくても、路側で車両位置を特定できるようにする。
【解決手段】 本発明の交通情報通信システムは、光ビーコン6と、これにアップリンク情報ULを送信する車載装置2と、そのアップリンク情報ULを用いて情報処理を行う中央装置4とを備える。車載装置2と中央装置4は、光ビーコン6に対するアップリンク情報ULの送信位置と対応する基準座標Rをそれぞれ生成する。車載装置2は、自装置で生成された基準座標Rから始まるオフセット値によって1又は複数の車両位置を表現し、その値をアップリンク情報ULに含める。中央装置4は、自装置で生成された基準座標Rと、アップリンク情報ULに含まれるオフセット値とに基づいて車両位置を特定する。
(もっと読む)
領域推定装置、領域推定方法、ならびに、プログラム
【課題】コントローラの位置や向きが取りうる範囲を簡易に推定するのに好適な領域推定装置、領域推定方法、ならびに、プログラムを提供する。
【解決手段】センサーバーは、無指向に赤外線を発光する少なくとも2つの無指向性発光部201を所定の間隔で備え、その外側に所定の距離だけ離れた位置に、指向性を持って赤外線を発光する指向性発光部204を少なくとも1つずつ備える。コントローラ202は、赤外線を検知するセンサを備え、検知された赤外線の光源と、検知された赤外線の位置とから、センサーバーに対するコントローラ202の配置される位置を推定する。
(もっと読む)
光学式位置検出装置および位置検出機能付き表示装置
【課題】パワーが比較的小さな光源を少ない数、用いた場合でも、対象物体の少なくとも二次元座標を検出することのできる光学式位置検出装置、および当該光学式位置検出装置を備えた位置検出機能付き表示装置を提供すること。
【解決手段】光学式位置検出装置10において、検出領域10R内の対象物体Obで反射した検出光を受光して対象物体Obの位置を検出するにあたって、検出領域10Rの辺に沿って延在する第1乃至第4線状光源体L1〜L4と、検出領域10Rを分割した領域R11、R12、R21、R22を受光対象領域とする第1乃至第4受光素子D1〜D4と用いる。このため、線状光源体は、検出領域10R全体に光強度分布を形成しなくてもよい。
(もっと読む)
光学式位置検出装置および位置検出機能付き表示装置
【課題】対象物体で反射した検出光を検出して対象物体の位置を検出するにあたって、検出光の出射強度を適正に設定することのできる光学式位置検出装置、および位置検出機能付き表示装置を提供すること。
【解決手段】光学式位置検出装置10では、光強度分布形成用の発光素子12A〜12Dによって検出領域10Rに検出光L2の強度分布を形成し、対象物体Obで反射した検出光L2を光検出器30で検出した結果に基づいて、対象物体Obの位置を検出する。また、光学式位置検出装置10は、検出領域10Rを経由せずに光検出器30に入射する参照光を出射する参照用発光素子12E〜12Gが設けられている。このため、駆動条件を設定する際、発光素子12A〜12Dから出射された検出光L2が光検出器30に入射しない場合でも、光強度分布のバランスをモニターでき、かかる光強度分布のバランスを最適化するような駆動条件を設定することができる。
(もっと読む)
ハンド装置
【課題】比較的簡素な構成でワークとハンド部との相対位置を検出することにより、ワーク把持動作の高速化を実現することのできるハンド装置を提供すること。
【解決手段】ロボットアーム200のハンド450に位置検出装置10を付加して位置検出機能付きのハンド装置400を構成する。位置検出装置10は、検出領域10Rに向けて位置検出光L2を出射する複数の発光素子12を備えた位置検出用光源部11を有しており、検出領域10Rに位置検出光L2の強度分布を形成する。また、検出領域10Rで反射した位置検出光L3は光検出器30で受光され、その受光結果に基づいて、位置検出部50は、ワークObとハンド450との相対位置を検出する。
(もっと読む)
測位装置、及びこれを用いたセンサ情報の統合解析による見守りシステム
【課題】無線ビーコン装置からのビーコン信号に基づき、人・動物・物等の位置を、高い測位精度及び外部ノイズや信号欠落への頑健性を持ちつつ推定することができる測位装置、及びこれを用いた見守りシステムを提供する。
【解決手段】確率的遷移による遷移後のパーティクルpi’{座標値i’,重みi}、及びそのビーコンパタンBP(pi’)を計算し、得られたビーコンパタンBP(pi’)と実際の受信ビーコンパタンBP(Receiver)とを用いた尤度計算による遷移後のパーティクルpi’{座標値i’,重みi}のパーティクルフィルタリングを行い、前記尤度を用いた遷移後のパーティクルpi’{座標値i’,重みi}の重みiの更新による新しいパーティクルpi’’{座標値i’,重みi’}を計算し、これら各処理のループを繰り返す。
(もっと読む)
2次元及び3次元位置検出システム、及びそのセンサ
2次元及び3次元の位置検出システム、ならびにそのシステムで使用されるセンサが開示される。センサは、線形アレイセンサ、及び、光又は他の放射線がセンサの大部分の素子に到達するのを遮るための開口プレートを内包する。相対的な放射線源の方向が、各センサの内の放射されたセンサ素子に基づいて、決定される。センサは、放射線源の位置を推定可能とするために、システム内に組み合わされる。 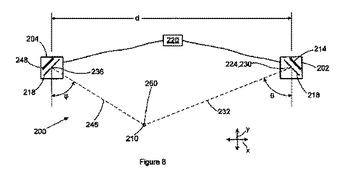 (もっと読む)
(もっと読む)
21 - 30 / 114
[ Back to top ]