
国際特許分類[G05B11/36]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 制御系または調整系一般;このような系の機能要素;このような系または要素の監視または試験装置 (12,533) | 自動制御装置 (494) | 電気式 (493) | 特別な特性,例.比例,微分,積分,を得るための装置をもつもの (345)
国際特許分類[G05B11/36]の下位に属する分類
比例特性を得るためのもの
積分特性を得るためのもの (2)
比例と時間依存特性の両方,例.P.I.,P.I.D,を得るためのもの (26)
国際特許分類[G05B11/36]に分類される特許
101 - 110 / 317
道路トンネル換気制御装置及び道路トンネル換気制御方法
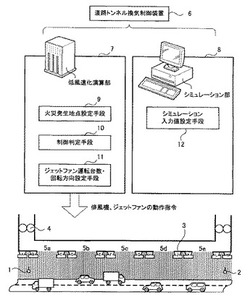
【課題】対面通行型トンネルまたは一方通行型トンネルにおいて、火災発生地点からの煙の拡散効果を短時間で確実に抑えることができ、より安全なトンネル環境を維持できるようにする。
【解決手段】トンネル本線上で、火災発生時にトンネル内の風速を低風速化する低風速化演算部と、トンネル本線において、施工後の換気システムの性能評価を行うための性能評価手段と、を備える。この低風速化演算部は、火災発生地点から両坑口に設置された風向風速計の内、どちらを使用するかを判定する制御判定手段と、風向、風速からジェットファンの運転台数及び回転方向を設定するための演算手段からなるジェットファン運転台数・回転方向設定手段とを含み、これら両坑口に設置された風向風速計とトンネル内に設置されたジェットファンを用いて、火災発生地点の風速を制御する。
(もっと読む)
除振システム、除振方法及びプログラム

【課題】多入力多出力を扱え、かつ非振動的な除振制御が可能であり、システム変動に頑強な制御を実現する。
【解決手段】搭載物が載置される定盤1を駆動する複数の駆動部3bに対応して配置された複数のセンサ3aにより、定盤1の状態量を計測する。次に、定盤1についての複数の状態量及び定盤1の運動方程式に基づいて、スライディングモード制御により、該当する駆動部3bに対する制御量を作成し、出力する。
またカルマンフィルタ9をさらに備え、制御部は、複数のセンサ3aのうち一部のセンサから取得した状態量をカルマンフィルタ9に入力し、カルマンフィルタ9で推定された他の状態量と一部のセンサから取得した状態量及び定盤1の運動方程式に基づいて、該当する駆動部に対する制御量を算出することが好適である。
(もっと読む)
プロセス制御システムにおいて電空コントローラを位置トランスミッタに連結する方法および装置
プロセス制御システムにおいて電空コントローラを位置トランスミッタに連結する例示の方法および装置が開示される。開示された例示の装置は、第1の接続部および電源に連結された第2の接続部を有する位置トランスミッタと、位置トランスミッタの第1の接続部に連結された少なくとも第1の接続部を含む電空コントローラと、電空コントローラの第1の接続部と第2の接続部とを連結するレジスタとを含む。 (もっと読む)
PID制御装置
【課題】 制御量が周期的な変動を呈している積分プロセスにおいて、制御対象に同定用信号を与えることなく、PID制御器のチューニングを可能とする。
【解決手段】 制御対象12に操作端14から加える操作量と、検出器15で検出される制御量から、周期解析手段31で周期を求める。積分特性算出手段である簡易積分器32で積分ゲインが求められ、プロセスモデル30が生成される。制御モデル20、制御モデルのPIDパラメータを調整する評価器21と併せて制御シミュレータ16を構成し、シミュレーションによって最適なPIDパラメータを算出する。算出した制御モデルのPIDパラメータを、プロセスの要求に合わせて微調整し、制御器13の制御パラメータとして設定することができる。
(もっと読む)
電空コントローラにおいて駆動値の変更を制限する方法および装置
電空コントローラにおいて駆動値の変更を制限する例示の方法および装置が開示される。開示する例示の方法は、制御信号およびフィードバック信号を受信することと、制御信号およびフィードバック信号から駆動値を算出することと、駆動値と以前の駆動値との差異が電空コントローラのスルー限界よりも大きいか否かを決定することと、スルー限界に基づいて算出された駆動値を変更することとを含む。 (もっと読む)
サーボ制御回路、アクチュエータの制御装置、および撮像装置
【課題】周波数が高い領域においても良好な制御特性を維持するとともに、集積回路化が容易なPID制御によるサーボ制御回路を提供する。
【解決手段】サーボ制御回路100において、差分演算部10は、制御対象から検出された検出信号xに比例した量と第1の信号fに比例した量との差uを出力する。A/D変換部21は、差分演算部10の出力uをデジタル変換する。積分部22は、A/D変換部21の出力Uをデジタル積分する。D/A変換部23は、積分部22の出力に比例した量Fをアナログ変換して、第1の信号fとして出力する。加算演算部15は、A/D変換部21の出力Uに比例した量と積分部22の出力Fに比例した量との和Dを出力する。デジタルPI制御部40は、加算演算部15の出力Dと目標値Rとの偏差Eに基づいて比例演算および積分演算を行なうことによって、制御対象を制御する制御信号Yを生成する。
(もっと読む)
外乱推定装置、制御対象モデル推定装置、フィードフォワード量推定装置および制御装置
【課題】運転条件が異なる毎に、外乱波形や制御対象モデルを同定するための計測を行うことなく、外乱波形および制御対象モデルのパラメータを推定できるようにする。
【解決手段】設定温度100℃で計測した外乱波形と設定温度300℃で計測した外乱波形とから、設定温度200℃の外乱波形を補間によって推定するようにしており、これによって、設定温度200℃での外乱波形の計測を不要としている。また、この補間した外乱波形を用いて設定温度200℃のフィードフォワード補正量を推定するようにしている。
(もっと読む)
むだ時間補償制御装置
【課題】制御対象だけでなく、制御装置内のむだ時間を補償することにより、制御系の安定性向上を図ったむだ時間補償制御装置を得る。
【解決手段】出力Y(s)のフィードバック値と目標値U(s)との偏差は制御装置1に入力されると同時に、制御装置むだ時間補償器6に入力され、制御装置むだ時間補償器6で求められた補償信号Pc(s)がむだ時間を経た制御量にフィードフォワード制御される。この結果得られる制御装置むだ時間e−Lc・sを補償後の制御量は、制御対象2に入力されると同時にスミス補償器4に入力され、求められた補償信号Pp(s)が制御装置1の前段にフィードバックされる。
(もっと読む)
可変構造制御装置
【課題】可変構造制御装置を用いたサーボ制御における、制御器の切り換え時の過渡特性の良化を図る。
【解決手段】互いに切り換え可能な複数の制御器C1、C2を具備し、プラントPの制御出力yを目標値rに追従させるサーボ制御を行う可変構造制御装置において、プラントPを制御する制御器をC2に切り換える際、当該制御器C2による制御入力に切り換え時のプラントPの初期状態に対する過渡特性を補償する付加入力upa及び目標値rに対する過渡特性を補償する付加入力uraを重畳した入力uをプラントPに与えることとした。
(もっと読む)
XYステージ
【課題】負荷の質量や、負荷とX軸駆動部との距離が変化した場合でも、安定して機械共振および反共振を吸収できるXYステージを実現する。
【解決手段】X軸方向に移動制御される第1部材と、この第1部材上に直交して結合しY軸方向に移動制御されると共に、前記第1部材との結合位置より所定距離を隔てて負荷が搭載された第2部材よりなるXYステージにおいて、
X軸指令値に基づいて前記第1部材を移動制御するX軸制御系と、
Y軸指令値に基づいて前記第2部材を移動制御するY軸制御系と、
前記X軸フィードバック制御系に挿入され、この制御系で発生する機械共振および反共振を吸収するようにパラメータが設定されているフィルタ手段と、
を具備し、
前記フィルタ手段は、前記Y軸制御系における前記負荷の情報を取得し、前記パラメータの設定値を更新する動的パラメータ設定部を備える。
(もっと読む)
101 - 110 / 317
[ Back to top ]