
国際特許分類[G05D1/02]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 非電気的変量の制御または調整系 (4,282) | 陸用,水用,空中用,宇宙用運行体の位置,進路,高度または姿勢の制御,例.自動操縦 (1,941) | 二次元の位置または進路の制御 (1,634)
国際特許分類[G05D1/02]の下位に属する分類
国際特許分類[G05D1/02]に分類される特許
41 - 50 / 1,633
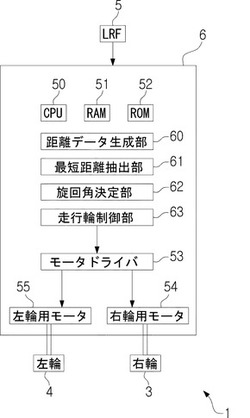
移動体の走行制御装置、走行制御方法、走行制御プログラム
【課題】移動体が外部環境との衝突を回避しながら走行するのに必要となる計算コストを抑制する技術を提供する。
【解決手段】自立走行ロボット1の走行を制御する走行制御部6は、進行方向側に存在する外部環境と、基準点Aと、の間の距離を計測して複数の距離データを生成する距離データ生成部60と、複数の距離データのうち、基準点Aから見て進行方向右側に分類されるものであって、最も小さい距離データを右側最短距離データDminRとして抽出し、複数の距離データのうち、基準点Aから見て進行方向左側に分類されるものであって、最も小さい距離データを左側最短距離データDminLとして抽出する、最短距離抽出部61と、自立走行ロボット1が外部環境との衝突を回避するのに必要となる旋回角θRAを決定する旋回角決定部62と、を備える。
(もっと読む)
対象物との相対位置計測方法と装置

【課題】向きの変更と移動の少なくとも一方を行う動作体から、対象物との相対位置を高精度に計測できる手段を提供する。
【解決手段】動作体3に設置したレーザ距離センサにより、各被計測点の位置を動作体座標系で表わされた座標値を取得する。動作体3に設置した撮像装置により、対象物5が含まれる領域を撮像して画像を生成する。画像において、対象物5に取り付けられた指標の位置を特定し、この位置に基づいて、撮像時において対象物5の方向を特定する。距離計測時の動作体3の向きと位置に対する撮像時の動作体3の相対的な向きθと位置Δx,Δyに従って、各被計測点の座標値を、距離計測時の動作体座標系の座標値から撮像時の動作体座標系の座標値に変換する。画像内の指標の位置に対応する、変換後の座標値を特定し、この座標値に基づいて、撮像時における動作体3から対象物5までの距離を求める。
(もっと読む)
搬送車、搬送車の制御方法及びプログラム
【課題】搬送サイクルタイムを短縮することができる搬送車、搬送車の制御方法及びプログラムを提供する。
【解決手段】搬送車は、第一誘導線に対応する方向と異なる方向に対応する第二誘導線を検出した場合、車体に配設された複数の駆動輪の駆動を停止する。搬送車は、複数の駆動輪を第一誘導線に対応する方向から第二誘導線に対応する方向に旋回する。搬送車は、第一誘導線に対する側方向の別と、走行方向前後の複数の位置における第一又は第二誘導線に対する車体の各位置偏差とに基づいて、駆動停止を継続する一つの駆動輪及び駆動を開始する他の駆動輪を決定する。
(もっと読む)
自動追尾式自走台車
【課題】差動式キャスタを備えた自走台車において、自動追尾機能を有する自動追尾式自動台車を提供する。
【解決手段】自動追尾式自走台車1は、差動式キャスタ(31,32,33)と、自動追尾装置と、を備える。差動式キャスタ(例えば、31)は、互いに独立して回転駆動する第1および第2の駆動輪(30e,30f)を有し、台車本体2に対して駆動方向を自在に可変することができる。そして、自動追尾装置は、被追尾体Pに対する台車1の距離および角度に関する情報を検出する検出手段(11,12)と、検出手段(11,12)により検出された情報に基づき台車1が走行すべき方向、および走行または停止を決定するとともに、決定された情報に基づき差動式キャスタ(31,32,33)に制御電流を供給する制御装置20と、を備える。
(もっと読む)
搬送車システムのシミュレーションシステムとシミュレーション方法
【課題】
共通のシミュレーション結果に対し、複数の端末で各々の観点から解析を行う。
【構成】
処理装置間でワークを搬送する搬送車システムをシミュレーションする。搬送車システムでの複数の仮想的な搬送車の走行をシミュレーションし、シミュレーションにより得られたデータと搬送車システムの背景画像とを複数の端末へ送信する。各端末は、データを画像として表示する搬送車システム内のエリアと時間の範囲とを端末毎にユーザが指定し、指定された範囲内のデータを画像化すると共に搬送車システムの背景画像と合成し、合成された画像をモニタに表示する。
(もっと読む)
特徴の配置のための位置制御システム
【課題】 作業位置の間を自発的に往来することが可能な作業機械の位置を決定する作業機械に使用するシステムを提供する。
【解決手段】 本体を備える作業機械と、本体に連結されるコンピューティングシステムと、本体から延びる器具であって、作業機械が位置する作業場所の地面を変更するために構成される、器具と、本体に連結されコンピューティングシステムと通信する測位システムであって、コンピューティングシステムが作業機械の位置および作業機械の配向を決定するようにコンピューティングシステムに渡されるデータを提供する、測位システムと、コンピューティングシステムに電気的に連結されてメモリに格納されるソフトウェアと、を含む。
(もっと読む)
無人搬送車
【課題】SLAM技術を用いた無人搬送車であっても、古典的な誘導方法で走行する無人搬送車と同様に簡単な方法で走行制御の破綻を監視することができる無人搬送車を提供すること。
【解決手段】SLAM技術を用いて現在位置を求め、求められた現在位置を基に、予め設定されている経路データ123に沿って走行し、経路データ123と無人搬送車1の現在位置とのずれを補正するための旋回角θ及び無人搬送車1の進路方向が目標位置に向くための操舵角ρを無人搬送車1が経路データ123に沿って走行するように補正しながら制御する制御手段10と、制御手段10による補正量の変動を監視するとともに、補正量が外乱によって制御可能な範囲を逸脱したときに走行を停止する監視手段11とを備える。
(もっと読む)
ロボット掃除機及びその制御方法
【課題】掃除領域の床面の材質または状態に応じて効率よく掃除作業を行うことができるように改善された構造を有するロボット掃除機及びその制御方法を提供する。
【解決手段】ロボット掃除機は、本体と、本体を駆動する駆動輪と、駆動輪を有する駆動輪組立体と、制御部と、を備える。制御部は、被感知体を感知して、基準位置に対する駆動輪の変位を検出し、駆動輪の変位によって床面の材質または状態を判断し、判断された床面の材質または状態によってロボット掃除機の走行を制御する。
(もっと読む)
自律移動体
【課題】自律移動体が移動する障害物を避けながら移動する際に、障害物に接近しすぎることがなく、障害物が移動する流れに沿って移動しながら目的地に到達する経路を探索する自律移動体を提供する。
【解決手段】自律移動体と移動障害物の間に仮想粘性力と仮想斥力が作用するとし、経路探索技術で用いる移動コストに仮想粘性力と仮想斥力を含める。また、分岐点を仮に選択して移動コストを計算する際には、その分岐点を通過する時点における移動障害物の位置と速度を予測して仮想粘性力と仮想斥力を計算する。移動障害物に接近しすぎると移動コストが増大し、移動障害物の流れに沿って移動すると移動コストが低下することから、移動障害物に接近しすぎることがなく、しかも移動障害物の流れに沿って移動する経路が探索される。
(もっと読む)
自動搬送車及びそれを用いた自動搬送車システム
【課題】自動搬送車や移動ロボットを用いる搬送システムにおける搬送の効率を向上するために、システム中の自動搬送車や移動ロボットに被搬送物として台車を連結し、牽引させた場合、自動搬送車ないし移動ロボットの本体と台車が接触するなどの干渉をおこし、従来よりも搬送の効率を低下させる場合がある、という問題がある。本発明では、上記の問題を解決することを課題とする。
【解決手段】上記課題を解決するために、本発明の自動搬送車100は、自機を移動させる移動機構101と、台車200と連結および切り離しができる連結機構106と、台車200が連結されているか否かを検出する連結検出センサ107と、自機の周囲の情報を取得する外界センサ104と、上記移動機構101の制御を行う制御装置105と、を備え、台車200が連結されている場合には、台車200が連結されていない場合と異なる走行経路を走行することを特徴としている。
(もっと読む)
41 - 50 / 1,633
[ Back to top ]