
国際特許分類[G05D1/02]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 非電気的変量の制御または調整系 (4,282) | 陸用,水用,空中用,宇宙用運行体の位置,進路,高度または姿勢の制御,例.自動操縦 (1,941) | 二次元の位置または進路の制御 (1,634)
国際特許分類[G05D1/02]の下位に属する分類
国際特許分類[G05D1/02]に分類される特許
21 - 30 / 1,633
重症心身障害者の自立的移動支援装置
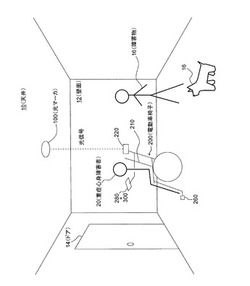
【課題】床にテープやガイドライン等を配置する必要が無く、レイアウト変更に対応可能な、重症心身障害者の自立的移動支援装置を提供する。
【解決手段】重症心身障害者の自立的移動支援装置において、移動空間の天井10や壁面12に配設された、該移動空間や移動装置200の進行方向に関する情報を発信するためのマーカ100と、移動装置200に配設された、前記マーカ100からの信号を受信するための受信手段220、周囲の壁面12や障害物16までの距離と方位を検出するための測位手段240、移動先を重症心身障害者20が指定可能な入力手段280、前記測位手段240の測定結果や前記マーカ100からの信号に基づき移動方向を判断して、前記入力手段280で指定された移動先まで移動装置200を移動するよう制御するための制御手段320、及び、該制御手段320の出力により移動装置200を駆動する駆動手段340と、を備える。
(もっと読む)
搬送車システム

【課題】経路上に進入禁止区間が設けられた場合であっても、効率的な搬送作業を可能とする搬送車システムを提供すること。
【解決手段】経路140と、複数の搬送車300と、複数の搬送車300の制御を行うコントローラ120とを備える搬送車システム100であって、MCS120は、搬送要求を受信する通信部121と、進入禁止区間を示す区間情報および予備期間を示す予備期間情報を記憶する記憶部122と、搬送要求が、予備期間内において実行の開始が予定され、かつ、目的地が進入禁止区間に含まれている特定搬送要求であるか否かを判定する判定部125と、当該搬送要求が特定搬送要求であると判定された場合、目的地の代わりとなる代替目的地を決定する代替目的地決定部126と、決定された代替目的地に、複数の搬送車200のうちのいずれかの搬送車200を向かわせるための搬送指令を送出する指令送出部127とを備える。
(もっと読む)
掃除ロボット
【課題】ユーザーが所望する任意の位置まで容易に誘導することができ、効率がより高い掃除運転を遂行することが可能な掃除ロボットを提供する。
【解決手段】掃除ロボット1は吸込口6と排気口7とを開口して床面上を自走する本体筐体2と、本体筐体2内に配置した電動送風機22と、電動送風機22の駆動によって吸込口6から吸い込まれた気流の塵埃を集塵する集塵部30と、赤外線を発することにより本体筐体2の設置空間の任意の位置を指定する赤外線リモコン60と、赤外線リモコン60によって指定された指示位置を検知する赤外線センサー18と、を備え、赤外線センサー18が検知した指示位置まで移動して及び/または指示位置までの移動中に掃除運転を実行する。
(もっと読む)
ロボット掃除機及びその制御方法
【課題】補助掃除ユニットの誤作動を検出し、該検出結果に基づいてロボット掃除機の走行を制御し、補助掃除ユニットに誤作動が発生した場合にも隅部分を効率的に掃除できるロボット掃除機及びその制御方法を提供する。
【解決手段】このロボット掃除機は、前記ロボット掃除機の下部に突出及び収納可能に装着される補助掃除ユニット100と、前記補助掃除ユニットの突出、収納または回転状態を感知する感知部300と、前記感知部の感知結果に基づいて前記補助掃除ユニットが正常に動作するか否かを判断し、前記判断結果に基づいて前記ロボット掃除機の走行を制御する制御部200と、を備える。
(もっと読む)
ロボット清掃機及びその制御方法
【課題】走行経路上で障害物が感知されても、それがロボット掃除機システムを構成する付加装置領域である場合は、補助掃除ユニットが突出しないように制御するロボット掃除機及びその制御方法を提供すること。
【解決手段】ロボット掃除機は、床を走行する本体、前記本体に近接する障害物を感知する障害物感知部、前記本体の下部に突出及び収納可能に装着された補助掃除ユニット、及び、前記障害物が感知されると、前記補助掃除ユニットが突出または収納されるように制御し、充電器領域を認知し、前記充電器領域では前記補助掃除ユニットが突出しないように制御する制御部を備える。
(もっと読む)
移動体の自己位置判別装置
【課題】位置判別演算開始点における移動体の進行方向角度(方位)を実際に移動するエリヤに設定した角度(方位)に対して誤差が少なく簡単に合わせることのできる移動体の自己位置判別装置を得る。
【解決手段】移動体10の両側面に移動体10の進行方向に直角に光電センサ12、13を取り付け、光電センサ12、13の光を反射するための反射板14、15を、移動エリヤの倉庫入口1の両側に、光電センサ12、13の光軸と対向するように設置する。倉庫入口1を移動車10が通過するときの光電センサ12、13の動作時間差を利用して通過時の角度を算出する。
(もっと読む)
走行制御装置および車両
【課題】物体の衝突を回避しつつ、車両を物体に近づけることができる走行制御装置および車両を提供すること。
【解決手段】車両1の速度が大きいほど長い第1バンパー距離71を設定する。これにより、車両1が低速走行する場合には高速走行する場合に比較して、第1バンパーより71が短いので、物体80が近くまで迫った場合に第1反発力F1が仮想的に車両に加えられる。すなわち、車両1が低速走行する場合、車両1と物体とが遠い間は、第1反発力F1が車両1に加えられないか、若しくは、小さな第1反発力F1が車両1に加えられる。よって、車両1を物体80に近づけることができる。
(もっと読む)
走行制御装置および車両
【課題】衝突回避対象の物体の種別に応じて、安全に物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】対象物の種別に応じて、その対象物に接触されているバネ73のバネ定数を設定し、そのバネ定数を使用して、収縮したバネ73から車両に加えられる反発力を算出する。これにより、対象物の種別に応じて適宜バネ定数を定義することにより、対象物の存在によって車両に加えられる反発力Frを、対象物の種別に合わせて大きくしたり、逆に、小さくしたりすることができる。よって、優先的に衝突を回避しなければならない物体については、より強い反発力が車両に加えられるようにすることができるので、衝突回避対象の対象物の種別に応じて、安全に物体の衝突回避を行うことができる。
(もっと読む)
情報取得装置、情報取得方法、情報取得プログラム、及び、情報取得システム
【課題】移動可能なノードが複数存在する空間において、位置認識の確実性を向上させる。
【解決手段】作業空間内の各ロボット100は、3つの他のロボット100からの光を受けて、当該他のロボット100の絶対位置の情報を取得することにより、自己の絶対位置を判別する。また、作業空間内の各ロボット100は、2つの他のロボット100からの光を受けて、当該他のロボット100の絶対位置の情報と、当該他のロボット100の位置から自ノードであるロボット100への絶対方位の情報とを取得することにより、自己の絶対位置を判別する。
(もっと読む)
走行制御装置および車両
【課題】車両の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】車両1の進路方向における仮想バンパー領域71を広く設定する。これにより、車両1の進行先にある物体80との衝突回避を確実に行うことができる。一方、車両1の進行方向とは異なる方向においては、仮想バンパー領域71が車両1の進行方向と比して相対的に狭く設定されるので、車両1の進行方向とは関係のない場所にある物体との衝突回避動作を抑制できる。よって、車両1の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体80の衝突回避を行うことができる。
(もっと読む)
21 - 30 / 1,633
[ Back to top ]