
国際特許分類[G05D1/02]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 非電気的変量の制御または調整系 (4,282) | 陸用,水用,空中用,宇宙用運行体の位置,進路,高度または姿勢の制御,例.自動操縦 (1,941) | 二次元の位置または進路の制御 (1,634)
国際特許分類[G05D1/02]の下位に属する分類
国際特許分類[G05D1/02]に分類される特許
31 - 40 / 1,633
走行制御装置および車両
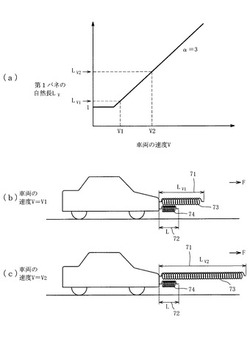
【課題】物体の衝突を回避しつつ、車両を物体に近づけることができる走行制御装置および車両を提供すること。
【解決手段】車両1の速度が大きいほど長い第1バンパー距離71を設定する。これにより、車両1が低速走行する場合には高速走行する場合に比較して、第1バンパーより71が短いので、物体80が近くまで迫った場合に第1反発力F1が仮想的に車両に加えられる。すなわち、車両1が低速走行する場合、車両1と物体とが遠い間は、第1反発力F1が車両1に加えられないか、若しくは、小さな第1反発力F1が車両1に加えられる。よって、車両1を物体80に近づけることができる。
(もっと読む)
自己位置推定装置、方法、及びプログラム

【課題】自己位置の推定精度を向上させる。
【解決手段】自己位置推定装置1は、移動体の複数の視点から取得される環境データに基づいて視点毎に二次元マップを作成するマップ作成部2と、複数の二次元マップの中から直線部が比較的多い二次元マップを抽出するマップ抽出部3と、抽出された二次元マップと、当該抽出された二次元マップと同一の視点から取得される環境データとの照合結果に基づいて、移動体の自己位置を推定する位置推定部4とを備える。
(もっと読む)
走行車両
【課題】旋回後の進入位置合わせを行える自動走行制御機能を備えた農業用の走行車両を提供すること。
【解決手段】ステアリングハンドルに連動して正転と逆転をするステアリングシャフト15の切れ角を検出する切れ角センサ49と該シャフト15に回転駆動力を伝達するための正逆転モータ20とモータ20の回転駆動力をシャフト15に伝達するための電磁クラッチ22を有する連動機構を備えた自動操舵装置25とカメラ53で圃場内の遠目標X及び/又は作業軌跡Tを検出してモニタ47に表示可能とし、自動スイッチの「入」操作時時に、前記切れ角センサ49が所定量のシャフト切れ角を検出して車両の旋回が行われたと判断されると、モニタ47で表示される旋回後の遠目標Xの位置情報及び/又は作業軌跡Tの位置情報に基づき自動操舵装置25のモータ20を作動させて圃場内で直進走行の自動操舵を行う制御構成を有する制御装置100を備えた走行車両である。
(もっと読む)
走行体制御装置、走行体制御方法、走行体制御プログラム及び記録媒体
【課題】被搬送物の損傷を防止しつつ搬送することで、被搬送物を用いた製品の生産効率等を向上させつつ、損傷した被搬送物が出荷等されることに起因する損害の発生等を抑止することが可能な走行体制御装置を提供する。
【解決手段】ガラス板Gを搬送するスタッカクレーンSを制御する場合に、ガラス板GのスタッカクレーンSへの搭載及びガラス板Gにおける振動の発生が共に検出されたとき、スタッカクレーンSを減速又は停止させる。
(もっと読む)
水中移動型検査装置及び水中検査設備
【課題】 海底構造物等の検査対象物が航走体の質量に基づく力を受けて損傷することを防止できるようにすると共に、検査対象物の検査を含む各種作業の質の向上を図ること。
【解決手段】 航走しながら海底パイプライン(検査対象物)13を検査することができる水中移動型検査装置11であって、潜水して、海底パイプライン13に対して非接触状態で検査対象物を辿りながら航走する航走体14と、この航走体14に設けられている第1可動アーム部16と、この第1可動アーム部16に設けられ、海底パイプライン13を検査するための検査用ツール部17と、航走体14が、海底パイプライン13に対して非接触状態で辿りながら航走するときに、第1可動アーム部16を作動させて、検査用ツール部17が海底パイプライン13に対して所定の目標位置関係となるように、検査用ツール部17を移動させることができる制御部とを備える。
(もっと読む)
移動ロボット
【課題】距離計測部を用いて高精度に位置決めを行う。
【解決手段】周辺物体までの距離と方向を計測する距離計測部3と、前記距離計測部が計測した周辺物体までの距離と方向を用いて目標物体の停止地点に対する当該移動ロボットの相対位置と相対方向を検出する相対姿勢検出部4と、前記相対位置と前記相対方向を用いて、前記移動機能部を制御する制御部5と、を備え、前記相対姿勢検出部は、前記目標物体を特定する線分を求めることにより、前記相対位置と前記相対方向を検出する。
(もっと読む)
計測システムおよび計測方法
【課題】距離計測センサを用いて、観測領域内の移動対象を追跡しつつ、精度よく、対象を識別して分類することが可能な計測装置を提供する。
【解決手段】計測装置100は、対象までの水平方向の距離を計測可能に配置された複数のレーザレンジファインダ10.1〜10.4と、計測結果から、対象の位置および移動速度を推定する追跡モジュール5610と、計測結果に基づいて、対象の形状を表現する特徴ベクトルを算出する特徴抽出演算部5622と、特徴ベクトルに基づいて、対象が予め定められた分類の各クラスに属する確率を事前確率として算出する事前確率計算部5624と、対象が他の対象と同期して移動している同期状態であるかを判別し、算出された事前確率と、同期状態にある対象が各クラスに対応する尤度とに基づいて、対象が属するクラスを判別するラベル割当処理部5628とを含む。
(もっと読む)
自動走行車両及び自動走行車両の制御方法
【課題】走行経路の詳細な位置データやティーチングが不要であり、走行経路を設定する手間が大幅に軽減される自動走行車両を提供する。
【解決手段】本発明に係る自動走行車両1は、車両本体2と、少なくとも車両本体2の両側方に位置するオブジェクトを検知する検知部3と、車両本体2の動作パターンを記憶する記憶部と、車両本体2の動作を制御するコントローラであって、少なくとも、車両本体2の一の側方に位置するオブジェクトを中心とした弧を描くように車両本体2を走行させ、車両本体2の他の側方を通過するオブジェクトの個数をカウントし、カウントされた前記オブジェクトの個数に基づいて、前記動作パターンにしたがって車両本体2の動作を変更するコントローラと、を有する。
(もっと読む)
飛行経路特定方法およびプログラム
【課題】複数の航空機が衝突を回避しつつ、迅速かつ効率的にそれぞれの目標位置に移動する。
【解決手段】飛行経路特定方法では、複数の航空機のうち任意の1の航空機が、他の航空機の目標位置と飛行経路とを受信し(S200)、他の航空機の目標位置を除く複数の目標位置から、到達までの時間が最短となる、または、到達に要するエネルギーが最小となる目標位置を選択し(S202)、自機の飛行状態に基づいて現地点から目標位置までの飛行経路を導出し(S204)、導出された飛行経路と他の航空機の飛行経路とを比較して、自機と他の航空機とが衝突するか否か判定し(S206)、衝突すると判定した場合、衝突しない飛行経路となるまで、飛行速度または飛行経路自体を変更する。
(もっと読む)
物品処理設備
【課題】物品の搬送を停滞なく適切に行えるようにしながらも、装備する無人搬送車の台数を減少させて設備の設置コストの低下を図ることができる物品処理設備を提供する。
【解決手段】外部搬出入部Bに位置する物品Pを自動倉庫Aの物品入出庫部2に搬送する物品搬入処理、及び、自動倉庫Aの物品入出庫部2に位置する物品Pを外部搬出入部Bに搬送する物品搬出処理を行うべく、無人搬送車担当経路における自動倉庫側に位置する倉庫側物品移載部F及び外部搬出入部側に位置する外部側物品移載部Gとの間での搬送作業を無人搬送車10に割り付ける搬送管理手段が、割込み要求が指令されたときには、倉庫側物品移載部Fと外部側物品移載部Gとの間での搬送作業の一部の搬送作業を、作業者によって運転される有人搬送車Mに割り付けるように構成されている。
(もっと読む)
31 - 40 / 1,633
[ Back to top ]