
国際特許分類[G05D1/02]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 非電気的変量の制御または調整系 (4,282) | 陸用,水用,空中用,宇宙用運行体の位置,進路,高度または姿勢の制御,例.自動操縦 (1,941) | 二次元の位置または進路の制御 (1,634)
国際特許分類[G05D1/02]の下位に属する分類
国際特許分類[G05D1/02]に分類される特許
51 - 60 / 1,633
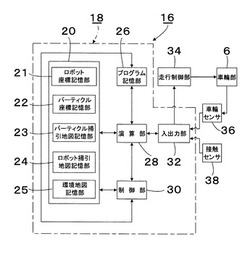
環境地図を用いた掃除ロボット
【課題】簡単に操作でき、自動的に環境内を掃除する掃除ロボットを提供する。
【解決手段】本発明は、コンピュータ18により駆動制御する走行制御部34と、車輪センサ36と、環境との接触を検出する接触センサ38を有し、環境を掃除する掃除ロボットにおいて、環境地図を保存する環境地図記憶部25と、オドメトリ情報から得られるロボット座標を保存するロボット座標記憶部21と、多数のパーティクルの座標を保存するパーティクル座標記憶部22と、前記環境地図とパーティクル軌道を保存するパーティクル掃引地図記憶部23と、前記多数のパーティクルの尤度を演算して最適軌道を導出する最適軌道導出手段と、前記最適軌道を前記掃除ロボットの軌道として保存するロボット掃引地図記憶部23と、小尤度のパーティクルを消去するリサンプリング手段と、前記掃除ロボット及び前記パーティクルを回転反射させる反射手段を有する掃除ロボットである。
(もっと読む)
リモートコントロール方法及びリモートコントロールシステム

【課題】コスト高を招くことなく、目視できない状況下でも、移動体を直感的に操縦できるリモートコントロール方法及びリモートコントロールシステムを提供する。
【解決手段】移動体20、は、常に操縦者HMの視線方向(基準方向)と平行に、その前方を向けており、よって例えば視線方向に対して右に角度δの方向に進行したい場合、それに応じた操舵量だけ進行方向を操作する操縦装置のスティックを視線方向に対して右に角度δの方向に倒せばよい。
(もっと読む)
自律移動装置
【課題】広範囲の地図情報を有し、且つ建物の窪みや行き止まりなどに進入しても脱出可能であり、目的地までの到達を保証する自律移動装置を提供する。
【解決手段】従来の自律移動装置は現時点で観測している障害物マップのみに基づいて局所経路を探索するため、建物の窪みや行き止まりなどに進入した場合、自律移動装置は次の経由点を探索できず、停止してしまう。そこで、障害物マップを保存・累積する機能を設け、累積した障害物マップから局所マップを作成する。こうすることで、前記障害物に進入した場合でも、過去の障害物マップを累積した局所マップを参照することで次の経由点に至る局所経路が探索され、前記障害物から脱出できる。局所マップは次の分岐点に到達するまで消去されないため、確実に次の分岐点に到達でき、結果として目的地までの到達が保証される。
(もっと読む)
処理設備
【課題】処理装置の制御負荷の増加を回避しながらも、処理作業効率の向上を図ることができる処理設備を提供する。
【解決手段】複数の処理装置1及び処理対象物を貯留する貯留装置Qを経由する搬送ラインに沿って走行して処理対象物を搬送する搬送車3を管理する搬送管理手段HCが、処理装置1から主管理手段JCに対して通信される処理進行情報を監視して、複数の処理装置1のうちで、処理対象物の処理が終了した又は終了間近である処理装置1を、主管理手段JCから搬送指令情報が通信されてくる以前に、事前搬送元として抽出し、その処理装置1から処理対象物を搬出するために、事前搬送元として抽出した処理装置1に対して搬送車3を走行させる事前搬送制御を実行するように構成されている。
(もっと読む)
位置・姿勢推定可能な移動体システム及び自律移動ロボットシステム
【課題】照射するレーザ光の反射光によって周囲の幾何的特徴を識別し、自装置の現在位置・姿勢を推定する際、幾何的特徴に乏しい環境においても確実に位置・姿勢を推定することが可能な移動体システムを提供する。
【解決手段】光学作用部材35を移動経路の棚や壁面等の障害物32に任意な位置と間隔にて取り付け固定する。これにより、移動体10から照射されるレーザ光は、障害物32から距離センサ部12に向けて反射するが、光学作用部材35からは反射光が到達しないため、反射光によって得られる幾何形状データ34に新たな幾何的特徴を生成することができ、移動体10は容易に自装置の現在位置及び姿勢を推定することができる。
(もっと読む)
無人搬送車および走行制御方法
【課題】運用が容易な無人搬送車および走行制御方法を提供する。
【解決手段】自身が走行する経路の情報である経路データ133に沿って走行する無人搬送車であって、自身の目的地に関する情報を取得し、現在位置を始点とし、目的地を終点として有する基本経路データ134がメモリデータ130に存在するか否かを判定し、存在しない場合、現在位置を始点として有する基本経路データ134をデータメモリ130から取得する取得処理と、取得した基本経路データ34の終点を新たな始点とする別の基本経路データ134をデータメモリ130から新たに取得して、終点を目的地に向けて、順に伸ばしていくつなぎ処理を、新たに取得した別の基本経路データ134の終点が、目的地に一致するまで実行し、取得した各基本経路データ134を経路データ133とするつなぎ処理部120を有することを特徴とする。
(もっと読む)
自動走行車および自動走行システム
【課題】走行位置検出におけるノイズの影響を受けにくく、トラブル発生時の再発車等も容易な自動走行車を用いた自動走行システムを提供する。
【解決手段】自動走行車1は、走路上の走行が可能な車台部10と、走路上に設けられた誘導線21を検出する誘導線センサ2と、誘導線センサにより検出された誘導線に沿って車台部を走行させるとともに、誘導線に設けられた制御情報24,25を読み取る情報読み取り部を備えたコントローラ4と、走路上に誘導線とは別に設けられた色ガイド31,32の色を検出する色センサとを有する。コントローラは、色センサにより検出された色ガイドの色と情報読み取り部により読み取った制御情報とに応じて車台部の制御を行う。
(もっと読む)
移動体システムと移動体の走行制御方法
【課題】
カーブ区間で移動体の位置を正確に求め、移動体を高い精度で移動させる。
【構成】
移動体の走行への制御中心から、移動体の走行方向とは異なる方向にシフトした位置で、走行方向に沿った移動体の位置を検出する検出器を設ける。移動体の走行経路中の少なくともカーブ区間に対して、検出器の出力に対する制御中心の走行方向に沿った位置を記憶部に記憶し、記憶部から読み出した制御中心の位置に基づき、移動体の走行を制御部により制御する。
(もっと読む)
自己位置推定装置、自己位置推定方法およびプログラム
【課題】自己位置を正確に推定することが可能な自己位置推定装置、自己位置推定方法およびプログラムを提供する。
【解決手段】自己位置推定装置は、撮影部、距離算出部、ランドマーク位置取得部、自己位置推定部、移動位置予測部、観測尤度計算部、視野内ランドマーク抽出部、撮影角度変更部、撮影制御部を有している。ランドマーク位置取得部は、各ランドマークの位置を取得する。自己位置推定部は、取得された画像、算出された距離、および上記位置に基づき自己位置を推定する。移動位置予測部は、推定された自己位置に基づき予測位置を算出する。撮影角度変更部は、視野内ランドマーク抽出部が抽出した視野内ランドマークについて観測尤度計算部が計算した観測尤度と、視野内ランドマークの観測角度とに応じて撮影角度を変更する。撮影制御部は、変更後の撮影角度で撮影した画像に基づき自己位置を更新する。
(もっと読む)
ロボット
【課題】人間との生活空間で使用出来るよう、設備の構造が極めて簡単であり、製造コストを極めて安価にすることが出来、障害物の存在する空間においても転倒することなく当該障害物を傷つけずに乗り越えることが出来るロボットを提供する。
【解決手段】ロボットに移動するための推進力を付与する推進力発生手段と、当該ロボットに浮揚力を付与する浮揚力発生手段とを備えることを特徴とし、当該浮揚力発生手段は、当該ロボットに働く重力をMg、当該浮揚力発生手段により発生される浮揚力をFとした場合に、Mg≧Fの関係を満足するよう設定されるロボットを採用する。
(もっと読む)
51 - 60 / 1,633
[ Back to top ]