
国際特許分類[G05D1/02]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 非電気的変量の制御または調整系 (4,282) | 陸用,水用,空中用,宇宙用運行体の位置,進路,高度または姿勢の制御,例.自動操縦 (1,941) | 二次元の位置または進路の制御 (1,634)
国際特許分類[G05D1/02]の下位に属する分類
国際特許分類[G05D1/02]に分類される特許
81 - 90 / 1,633
搬送車システム、速度決定方法
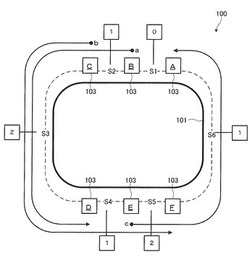
【課題】環状の軌道上を一方通行で走行する搬送車を備える搬送車システムにおいて実荷状態で走行する搬送車の状況を把握し、搬送車システムの搬送効率を向上させる。
【解決手段】環状の軌道101と、搬送車102と、ステーション103とを備え、さらに、荷物を搬送する計画を示す情報である搬送計画を取得する搬送計画取得部104と、ステーション103、および、セグメントのレイアウト情報であるマップを取得するマップ取得部105と、搬送計画とマップとからセグメント毎に荷物を積載した状態で搬送車が通過する回数である実荷通過度数を算出する度数算出部106と、周回方向において実荷通過度数が連続的に増加するセグメントの区間である増加区間を特定する増加区間特定部107と、増加区間の実荷通過度数の低いセグメントにおける搬送車102の速度を低下させる制御部108とを備える。
(もっと読む)
無人搬送車及び該無人搬送車の防護エリア制御方法

【課題】搬送自走車に搬送台車を連結した際、搬送自走車に備えたレーザスキャナにより搬送台車周りに防護エリアを形成することができる無人搬送車を提供する。
【解決手段】本無人搬送車1は、搬送自走車2と搬送台車3との間に設けた、両者の連結を検知する検知手段4と、該検知手段4による検知に基づいて、防護エリア10を搬送台車3周りに形成するためにレーザスキャナ5を移動させる移動手段6とを備えているので、搬送自走車2に搬送台車3を連結した際、搬送自走車2に備えたレーザスキャナ5により搬送台車3周りに防護エリア10を形成することができる。
(もっと読む)
地図処理方法及びプログラム、並びにロボットシステム
【課題】地図処理方法及びプログラム、並びにロボットシステムにおいて、独立して作成された複数の地図の座標系が異なる場合であっても、高精度にこれら複数の地図の座標系を統合することを目的とする。
【解決手段】ロボットの第1のセンサの計測情報に基づき予め生成された第1の地図と、ロボットの各位置での第1のセンサの計測情報とに基づいて第1の地図上の自己位置を推定し、第2のセンサの計測情報に基づき予め生成された第2の地図と、各位置での第2のセンサの計測情報とに基づいて第2の地図上の自己位置を推定し、ロボットの第1の地図上の第1の移動軌跡と第2の地図上の第2の移動軌跡とに基づいて予め算出された、前記第1の移動軌跡の第1の座標系を前記第2の移動軌跡の第2の座標系へ非線形マッピングする座標変換パラメータに基づいて、推定されたロボットの第1の地図上の自己位置を第2の地図上の自己位置に変換するように構成する。
(もっと読む)
有軌道台車システム
【課題】有軌道台車システムにおいて、接続軌道を効果的に短縮し、省スペースを実現する。
【解決手段】有軌道台車システムは、第1及び第2の本軌道(101,102)、並びに接続軌道(105)を有する軌道(100)と、台車(200)とを備える。台車は、一対の第1及び第2の分岐ローラ(610)をシフト可能に支持する分岐ローラ支持部(720)と、姿勢安定ローラ(620)をシフト不能に支持する姿勢安定ローラ支持部(710)とを有している。軌道は、第1の分岐ローラを案内する第1の分岐ガイド(110a)と、第2の分岐ローラを案内する第2の分岐ガイド(110b)と、無ガイド区間で姿勢安定ローラを案内する姿勢安定ローラガイド(120b)とを有している。
(もっと読む)
搬送車システム
【課題】各搬送車に対する搬送要求の割り当てを効率よく行うことのできる搬送車システムを提供すること。
【解決手段】複数のステーション120に沿って設けられた一方通行の経路105と、複数の台車140と、コントローラ110とを備える搬送車システムであって、コントローラ110は、数の搬送要求を複数の台車140に通知する要求通知部112を有し、複数の台車140のそれぞれは、複数の搬送要求を受信する要求取得部142と、先行搬送車から、複数の搬送要求のうちの、先行搬送車が実行を予定する搬送要求を示す先行車情報を受信する受信部144と、先行車情報を参照することで特定される、複数の搬送要求のうちの当該搬送車が実行可能な1以上の搬送要求の中から、当該搬送車が実行する搬送要求である実行要求を決定する決定部146と、実行要求を示す情報を、後続搬送車に送信する送信部148とを有する。
(もっと読む)
経路探索機能付き移動体
【課題】地図データ上で自己位置と最終目標点が特定されたときに、自己位置から移動可能範囲内を伸びて最終目標点に至る大域経路を計算する技術が知られている。障害物を検出したときに、障害物を回避しながら最終目標点に至る経路を計算する技術も知られている。しかしながら両者を融合する技術が未解決であり、障害物を回避してから大域経路に復帰する経路がうまく計算できない。
【解決手段】障害物回避経路計算手段で用いる最終目標点に代えて中間目標点を用いる。障害物よりも遠方にある大域経路上の点を中間目標点とすると、障害物を回避してから大域経路に復帰する経路を計算できる。
(もっと読む)
制御方法、プログラム、記録媒体、及び、制御装置
【課題】複数の固有振動数が生じる場合において、運ばれる物体に移動装置の振動に伴う揺れを全く生じさせないことによって安定して確実且つ迅速に物体を運ぶことができる制御方法等を提供する。
【解決手段】物体を運ぶ移動装置の速度関数を三角関数の級数で表し(S1)、三角関数の級数においてサイドローブが発生しない係数a1等を求め(S2)、物体の重量と移動装置における重心位置とから生じる複数の固有振動数を求めて最低固有振動数fminを求め(S3)、最低固有振動数fminがメインローブとサイドローブとの境界周波数fc1よりも大きな値の帯域となるように加減速時間tcを設定し(S4)、係数a1等と加減速時間tcが決まって得られた速度関数により物体を運ぶ移動装置の速度を制御して物体を運ぶ(S5)。
(もっと読む)
清掃ロボットの制御システムおよび制御方法
【課題】標示体を特定の領域に固定する必要がない掃除ロボットの制御システムおよび制御方法を提供する。
【解決手段】少なくとも1つの標示体と、当該標示体の位置を検出および記録して記録結果を生成し、かつ当該生成された記録結果をロック(lock)するロック機能を備える清掃ロボットとを含む清掃ロボットの制御システムであって、当該ロック機能が起動されると、当該清掃ロボットは当該記録結果に基づいて清掃動作を実行し、当該ロック機能が起動され、かつ当該標示体が取り除かれたとき、当該清掃ロボットは、当該標示体の取り除かれる前の位置に基づいて当該清掃動作を実行する。
(もっと読む)
自律走行装置及び自律走行方法並びにそのプログラム
【課題】分岐路のある道路でも白線などのガイド線を用いずに自律走行が可能となる自律走行装置を提供する。
【解決手段】周囲の検出範囲の接地面に仮想的に設けた点範囲それぞれの高さを検出し、近傍の点範囲との高さの差が路肩検出基準値以上となる場合の点範囲を、路肩点を示す点範囲と検出する。そして、検出範囲内における基準経路の左右両側それぞれにおいて検出した路肩点を左右両側ごとにそれぞれ結んだ左右両側それぞれの路肩線を特定し、当該左右両側それぞれの路肩線に基づいて道路形状を認識する。また、検出範囲内の左右の路肩線の間に仮想的に設けた複数の経路候補が示す点範囲を特定し、当該経路候補が示す各点範囲の高さと、当該経路候補が示す点範囲隣接する他の点範囲の高さとの変化量の小さい経路候補を走行経路と特定する。
(もっと読む)
無人搬送システム
【課題】マーカーを設けることなく無人搬送車の走行速度を制御することができる無人搬送システムを提供する。
【解決手段】誘導ライン2Dと、無人搬送車とを備えた無人搬送システムであって、誘導ライン2Dは、異なる3つの色が順繰りに現れるように着色された3種類の着色領域2a、2b、2cを有し、無人搬送車は、撮像手段と、着色領域2a、2b、2cの色に基づいて目標速度を設定する目標速度設定部と、走行制御部と、3種類の着色領域2a、2b、2cの色の順番に基づいて走行方向を特定する走行方向特定部と、着色領域2a、2b、2cの色と走行速度との関係および3種類の着色領域2a、2b、2cの色の順番と走行方向との関係があらかじめ格納されており、かつ着色領域の色の履歴が格納される記憶部と、を有することを特徴とする。
(もっと読む)
81 - 90 / 1,633
[ Back to top ]