
国際特許分類[G05D1/02]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 非電気的変量の制御または調整系 (4,282) | 陸用,水用,空中用,宇宙用運行体の位置,進路,高度または姿勢の制御,例.自動操縦 (1,941) | 二次元の位置または進路の制御 (1,634)
国際特許分類[G05D1/02]の下位に属する分類
国際特許分類[G05D1/02]に分類される特許
101 - 110 / 1,633
無人搬送システム
【課題】マーカーを設けることなく無人搬送車の走行速度を制御することができる無人搬送システムを提供する。
【解決手段】路面に敷設された誘導ライン2と、該誘導ライン2に沿って所定の走行速度で走行する無人搬送車3とを備えた無人搬送システム1であって、誘導ライン2は、区間によって異なるライン幅を有し、無人搬送車3は、誘導ライン2を含む領域の画像データを生成する撮像手段4a、4bと、生成された画像データにおけるライン幅に基づいて目標速度を設定する目標速度設定部5と、目標速度に一致するように走行速度をフィードバック制御する走行制御部6と、を有することを特徴とする。
(もっと読む)
車両および車両制御プログラム

【課題】搭乗者の進行したい方向を正確に汲み取りながら走行予定軌道を選択して自動走行を行うことができる車両および車両制御プログラムを提供すること。
【解決手段】第3車両位置予測処理(S107)によって、ステアリングホイール13の回転角速度Δδを取得してステアリングホイール13の操舵角を算出し、そのステアリングホイール13の操舵角から前輪2FL,2FRへ付与される操舵角を算出して、その前輪2FL,2FRへ付与される操舵角と車両速度とに基づいて車両1のヨーレートを推定し、その推定したヨーレートから所定時間後の車両位置を予測する。これにより、搭乗者の進行したい方向を、所定時間後の車両位置まで特定して把握しているので、予測された車両位置に基づいて走行軌道を選択することによって、搭乗者の進行した方向を正確に汲み取りながら走行予定軌道を選択して、自動走行を行うことができる。
(もっと読む)
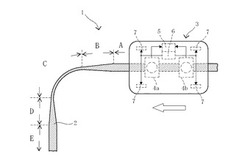
無人車両および無人搬送システム
【課題】撮像手段が2つだけであっても姿勢角を修正しながら全方向に走行可能な無人車両および該無人車両を備えた無人搬送システムを提供する。
【解決手段】無人車両10は、それぞれ領域A1、A2の画像データを出力する2つの撮像手段11a、11bと、画像データに基づいて姿勢角を算出する姿勢角算出部と、姿勢角がゼロになるように車輪15の操舵角を制御する操舵制御部とを備える。姿勢角算出部は、第1方向に走行する際は、2つの撮像手段11a、11bから出力される2つの画像データにおける誘導ラインの位置に基づいて姿勢角を算出し、第2方向に走行する際は、1つの撮像手段11aから出力される1つの画像データにおける誘導ラインの位置に基づいて姿勢角を算出するか、または2つの撮像手段11a、11bから出力される2つの画像データにおけるマーカの位置に基づいて姿勢角を算出する。
(もっと読む)
歩行ロボット装置及びその制御プログラム
【課題】環境地図の作成と自己位置推定を、求められる精度を確保しつつ、安価に実現することのできる歩行ロボット装置及びその制御プログラムを提供する。
【解決手段】環境地図を作成する機能は、2ヶ所において撮影した地図作成用環境画像から撮影対象物を示す代表点を抽出し、代表点の位置と撮影した位置座標とから撮影対象物の位置座標を求め、撮影した地図作成用環境画像、代表点の位置及び前記撮影対象物の位置座標とを関連付けた環境地図を作成する。自己位置を推定する機能は、任意の位置座標において撮影した位置推定用環境画像中の撮影対象物の代表点に、対応する地図作成用環境画像中の撮影対象物の位置座標を対応させ、交会法によって前記歩行ロボット装置の自己位置を算出する。
(もっと読む)
干渉回避制御装置
【課題】干渉チェックの見落としによる機器同士の干渉発生をより確実に防ぐことのできる干渉回避制御装置を得ること。
【解決手段】干渉回避制御装置は、補間制御周期での停止予定位置に基づく干渉チェックに見落としが生じうるか否かを判定する第1判定手段11と、干渉チェックに見落としが生じうると判定された見落とし区間において、1補間制御周期を整数で割った周期で停止指令を出した場合の停止予定位置を算出する第1計算手段1と、停止予定位置に基づいて動作機器と他の機器との機器間距離を算出する第2計算手段2と、3点以上の機器間距離に基づいて近似曲線を算出する第3計算手段3と、近似曲線に基づいて見落とし区間における機器間距離の最小値を算出する第1最小値算出手段4と、動作機器と他の機器とが近接した場合の近接距離と最小値とを比較して干渉の有無を判定する第2判定手段5と、を備える。
(もっと読む)
車両および車両制御プログラム
【課題】自車両の走行を自動で制御しつつ、搭乗者の意思に沿って走行経路を決定できる車両および車両制御プログラムを提供すること。
【解決手段】車両1が、予め設定された走行軌道に沿って自動走行を行っている場合に、搭乗者がジョイスティック13を傾斜操作すると、走行制御装置100は、その傾斜方向(操作角度δ)に基づいて進行すべき道路を選択し、その道路へ進入するための走行軌道を走行軌道メモリ93bに格納する。これにより、搭乗者の意思に基づいて指示された車両1の進行すべき方向に基づいて走行軌道が設定され、その走行軌道に沿って車両1の走行を制御できる。よって、自車両の走行を自動で制御しつつ、搭乗者の意思に沿って走行軌道を決定できる。
(もっと読む)
汚れ検出手段を組み込んだ清掃走行経路ガイド方法
【課題】汚れ検出手段を組み込んだ清掃走行経路ガイド方法を提供することを課題とする。
【解決手段】汚れ検出手段を組み込んだ清掃走行経路ガイド方法であって、自動清掃装置で実行され、清掃経路を生成して自動清掃装置に未清掃領域の清掃をガイドするために用いられ、未清掃領域内で複数の格子を定義できる。該方法は、まず未清掃領域において自動清掃装置を移動させて汚れを清掃し、また、掃除したゴミ量を継続して検出することで、現位置格子の汚れ具合を取得する。現位置格子の汚れ具合が閾値を超えた時、格子を汚れ格子としてマークする。アルゴリズムを実行し、マークした汚れ格子に基づき、全ての汚れ格子を通過できる最短経路を探索して清掃経路とする。最後に、清掃経路に基づき自動清掃装置が移動して各汚れ格子を通過させ、順番通り各汚れ格子を清掃することである。
(もっと読む)
車両用情報処理装置
【課題】簡易な構成で現在位置よりも先の車両位置における車両の旋回曲率を推定する。また、望ましくは推定された旋回曲率を車両挙動の安定化に利用する。
【解決手段】車両(1)に搭載される車両用情報処理装置(100)は、操舵入力に対応する操舵入力情報、旋回状態を規定する車両状態量及び車速に基づいて、前記車両の将来位置を算出する将来位置算出手段と、前記算出された将来位置を少なくとも一つ含み、且つ前記車両の現在位置に対応する車両位置を含む、前記車両に係る三以上の車両位置に基づいて、前記現在位置よりも先の暫定走行位置における前記車両の旋回曲率を推定する推定手段とを具備する。
(もっと読む)
無人搬送システム
【課題】停止マークの汚れや欠けに強い無人搬送システムを提供する。
【解決手段】本発明に係る無人搬送システムは、路面に敷設された誘導ライン2と、誘導ライン2上に設けられた停止マーク3と、誘導ライン2に沿って走行するとともに、停止マーク3を目印にして停止する無人搬送車とを備えたシステムである。停止マーク3は、誘導ライン2とは異なった色で着色された部分(3b、3d)を有し、色の違いにより交差する2本の線X、Yを認識させ得るようになっている。また、無人搬送車は、該2本の線X、Yの交点を目印にして停止するよう構成されている。
(もっと読む)
移動予測装置、ロボット制御装置、移動予測プログラムおよび移動予測方法
【構成】移動予測装置10は複数のLRF12およびロボット14を備える。また、予測移動装置10は、複数のLRF12によって人々の移動軌跡を記録し、分析することで短期的な移動の目標となる経由点vを空間に設定する。人の移動は複数の経由点を含む経由点系列によって表すことができ、この経由点系列は、そのときの移動時間tおよびその経由点系列の移動遷移確率pが関連付けられて、経由点リストLに記録される。そして、移動予測装置10は、経由点リストLを利用して、予測移動時間T後において、人が各経由点vへ到達する到達確率Pを算出する。
【効果】移動予測装置10は、各経由点vへの到達確率Pに基づいて、人が到達する位置を予測することができる。また、予測された到達位置または設定された各経由点vに基づいて、ロボット14の行動を決めることができる。
(もっと読む)
101 - 110 / 1,633
[ Back to top ]