
国際特許分類[G05D3/00]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 非電気的変量の制御または調整系 (4,282) | 位置または方向の制御 (841)
国際特許分類[G05D3/00]の下位に属する分類
フィードバックを用いないもの (23)
フィードバックを用いるもの (588)
国際特許分類[G05D3/00]に分類される特許
1 - 10 / 230
マスタ軸とスレーブ軸との同期制御を行うモータ制御装置
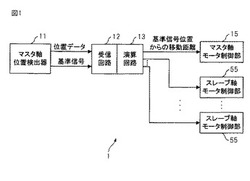
【課題】マスタ軸を駆動するマスタ軸モータとスレーブ軸を駆動するスレーブ軸モータとを正確に同期制御することができる、小型で低価格のモータ制御装置を実現する。
【解決手段】マスタ軸を駆動するマスタ軸モータ14とスレーブ軸を駆動するスレーブ軸モータ54とを同期制御するモータ制御装置1は、マスタ軸の位置データと所定一定周期の基準信号とを出力するマスタ軸位置検出器11と、マスタ軸位置検出器11が出力した位置データと基準信号とを受信するマスタ軸受信回路13と、マスタ軸受信回路13が受信した位置データと基準信号を受信した時点の位置データとの差分を、マスタ軸差分として算出するマスタ軸演算回路13と、マスタ軸差分をマスタ軸モータ14の動作と同期を取るための信号として用いてスレーブ軸モータ54の動作を制御するスレーブ軸モータ制御部55と、を備える。
(もっと読む)
ステージ機構およびその駆動方法

【課題】ステージを搭載する固定ベース表面に組み込んだマイクロヒータアレイで構成されるコンパクトなアクチュエータシステムで、XY方向、ヨー回転方向の3自由度に関する長ストローク駆動、およびZ/ピッチ/ロール方向の微細駆動を実現することができるステージ機構およびその駆動方法を提供する。
【解決手段】ステージ1に接触するベース2の表面近傍に、ベース2の表面の熱変形突出用の第一層目のヒータ3をXY方向にアレイ状に複数配置し、更にベース2の表面から深いところに、第一層目のヒータ3の前後左右を挟み込むように第二層目のヒータ4をXY方向にアレイ状に複数配置する。第二層目のヒータ4が、第一層目のヒータ3による熱変形突出部をXY方向に移動することにより、熱変形突出部に接触するステージ1をXYθ方向に駆動する。
(もっと読む)
ギア加工機の制御装置
【課題】伝達遅れを抑え且つ分岐回路無しで、一つのマスタ軸に対して一つまたは複数のスレーブ軸を同期させる。
【解決手段】ギア加工機の制御装置(1)は、工具軸コントローラ(22)とワーク軸コントローラ(12)との間を直接的に接続して通信するバス(51)を具備し、工具軸位置検出センサ(25)により検出された工具軸(40)の位置はバスを通じてワーク軸コントローラに供給され、上位コントローラ(10)は所定の同期比と、ねじれ動作を加えるための重畳指令とをワーク軸コントローラに供給するようになっており、ワーク軸コントローラは、バスを通じて供給された工具軸の位置に同期比を乗算して作成された値と重畳指令とを加算して、ワーク軸(30)の移動指令を作成するようにした。
(もっと読む)
不感帯処理部を備えた電動機の制御装置
【課題】被駆動体を電動機によって同一動作パターンの繰り返し制御を行う場合において、被駆動体を停止させるために電動機の位置指令をゼロにしたときに発生し得る被駆動体の振動を抑制することができる電動機の制御装置を実現する。
【解決手段】電動機Mの制御装置1は、被駆動体2の位置を検出する位置検出部11と、電動機Mに与えられる位置指令と位置検出部11で検出した被駆動体2の位置との位置偏差をサンプリング周期毎に取得する位置偏差取得部12と、位置偏差取得部12により取得した位置偏差が所定の不感帯範囲内に含まれる場合は当該位置偏差をゼロに置き換えて出力する不感帯処理部13と、不感帯処理部13から出力された位置偏差がゼロになるような補正量を算出する繰り返し制御部14とを備え、位置偏差取得部12により取得した位置偏差と繰り返し制御部14により算出された補正量とに基づいて、電動機Mを制御する。
(もっと読む)
モータ制御装置及び画像形成装置
【課題】停止精度の向上、停止までの所要時間の短縮化及び所要時間のばらつきの低減を、バランス良く実現可能な新しいモータ制御技術を提供する。
【解決手段】モータ制御ユニットは、モータに入力可能な電流上限値を推定し、この上限値に対応する駆動電流でモータを駆動する第一制御処理を実行すると共に(S180)、標準プロファイルに基づく第二制御処理によって駆動対象を減速・停止させるのに必要な搬送量である停止必要量Pnを算出する(S150)。標準プロファイルは、駆動対象10の駆動開始時点から停止時点までの時間が一定で、減速時の加速度ピークが、モータで実現可能な限界値−Apに設定された目標プロファイルである。そして、目標停止位置までの残り搬送量Psが停止必要量Pn以下となった時点で(S170でYes)、第一制御処理に代えて第二制御処理を実行し(S200)、駆動対象を精度よく目標停止位置で停止させる。
(もっと読む)
ステージ移動装置及び無接点充電器
【課題】可及的に安価で、モータ制御が簡単なステージ移動装置を提供する。
【解決手段】ステージ移動装置1を、1個の正・逆回転可能なモータ100と、互いに直角に交差して配置され、交差部分にステージ600を保持するX軸方向キャリッジ400X及びX軸方向キャリッジ400Xと、モータ100の回転力をX軸方向キャリッジ400XをX軸方向に移動させる経路に伝達するか、Y軸方向キャリッジ400YをY軸方向に移動させる経路に伝達するかをステージ600の移動目標に応じて切り替える動力伝達経路切替手段と、モータ100の回転軸の回転運動をX軸方向キャリッジ400Xの直線往復運動又はY軸方向キャリッジ400Yの直線往復運動に変換する運動方向変換手段と、X軸方向キャリッジ案内手段及びY軸方向キャリッジ案内手段と、ステージ600の移動目標に応じてモータ100の回転方向及び回転角度を制御するモータ制御装置とで構成した。
(もっと読む)
同期制御装置
【課題】容易かつ遅れなしにカム曲線の切替が可能な同期制御装置を提供する。
【解決手段】カム曲線記憶部64は、第1のカム曲線および第2のカム曲線を記憶する。制御部66は、カム曲線の切替え前は、各制御タイミングで、第1のカム曲線上の値に基づいて、従動側部材への位置指令値を求め、カム曲線の切替え後は、各制御タイミングで、第2のカム曲線上の値に基づいて位置指令値を求め、カム曲線の切替期間は、各制御タイミングで、第1のカム曲線または従動軸の位置に基づく第1のデータと、第2のカム曲線に基づく第2のデータとを加重平均した値に基づいて従動側部材への位置指令値を求める。
(もっと読む)
一つの被駆動体を二つの電動機で駆動させる制御装置
【課題】二つの電動機間の機動力が互いに干渉することによって生じうる振動を抑制するために、二つのプロセッサで二つの電動機を制御することができる制御装置を提供する。
【解決手段】DSP11aは、取得した回転サーボモータ3aの速度値をDSP11bに送信するとともに回転サーボモータ3bの速度値をDSP11bから受信し、回転サーボモータ3aへのトルク指令に対する補正量を、回転サーボモータ3aの速度値と回転サーボモータ3bの速度値との速度値差に基づいて計算する。DSP11bは、取得した回転サーボモータ3bの速度値をDSP11aに送信するとともに回転サーボモータ3aの速度値をDSP11aから受信し、回転サーボモータ3bへのトルク指令に対する補正量を、回転サーボモータ3aの速度値と回転サーボモータ3bの速度値との速度値差に基づいて計算する。
(もっと読む)
追尾装置
【課題】大きな角速度を必要とせず、全天に渡り目標の自動追尾を可能とする。
【解決手段】追尾装置は、球状胴体と、第1から第3ジンバルと、可動体と、球体駆動部と、駆動保持部と、目標位置認識部と、第1から第4角度センサと、回転バネ駆動部と、制御部と、を備えている。駆動保持部は、第3ジンバルと可動体とを接続し、球体駆動部を球状胴体に押圧した状態に保持する。目標位置認識部は、可動体に支持され、目標の位置データを出力する。第1から第3角度センサはそれぞれ、第1から第3ジンバルの第1から第3回転角度を検出する。第4角度センサは、第3ジンバルに対する可動体の第4回転角度を検出する。回転バネ駆動部は、第3ジンバルを回転中心に戻す。制御部は、位置データ、及び第1回転角度から第4回転角度までを使用して、目標を追尾するように球体駆動部を制御する。
(もっと読む)
機器移動システム
【課題】機器移動システムにおいて、所定の移動面に沿って任意の機器を任意方向に自律的に移動可能とする。
【解決手段】機器移動システム1は、所定の移動面Sに沿って移動することができる移動ユニット2を備える。移動ユニット2は、任意の機器10が搭載される移動体11と、移動体11に一体的に設けられたアクチュエータ3と、移動体11を移動面Sに拘束する拘束装置13とを備える。アクチュエータ3は、電磁力に基づく衝撃を発生し、移動体11を衝撃力の方向に移動させる。拘束装置13は、移動ユニット2を移動面Sに対して移動自在かつ摩擦力が発生するように機械力または電磁気力により拘束する。機器10が受電機器に給電する給電用1次コイルであり、受電機器が移動面Sの上方の任意位置に載置されると、移動ユニット2が受電機器の下部に移動し、給電用1次コイルを受電機器の位置に移動して給電でき、給電場所に融通性を持たせることができる。
(もっと読む)
1 - 10 / 230
[ Back to top ]