
国際特許分類[G08G1/04]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 計数または制御されるべき交通量の検出 (1,848) | 光学式または超音波式検出装置を用いるもの (558)
国際特許分類[G08G1/04]に分類される特許
511 - 520 / 558
移動物体検出装置及び移動物体検出方法
【課題】 移動物体を高精度に追跡可能な移動物体検出装置及び移動物体検出方法を提供することを課題とする。
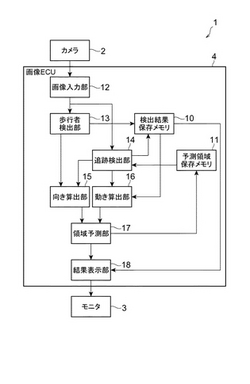
【解決手段】 撮像画像から移動物体を検出する移動物体検出装置1であって、撮像手段2と、撮像手段2で撮像した撮像画像から移動物体を検出する移動物体検出手段13と、移動物体検出手段13で検出した移動物体の向きを検出する向き検出手段15と、撮像手段2で異なる時間に撮像した各撮像画像から各々検出された移動物体の位置から移動物体の動きを検出する動き検出手段16と、向き検出手段15で検出した移動物体の向きと動き検出手段16で検出した移動物体の動きに基づいて撮像画像における移動物体の存在する領域を予測する領域予測手段17とを備え、領域予測手段17で予測した領域内から移動物体を検出することを特徴とする。
(もっと読む)
車色判定装置及び車両検索システム

【課題】高度な画像処理によらず簡便な方法でありながら、データ伝送効率と車色判定精度の向上化が可能であり、更に、実環境で使用する場合に問題となる複数色に塗装している車両の車色判定と、照度変化があった場合の車色判定を高精度に行うことが可能な車色判定装置及び車両検索システムを実現する。
【解決手段】車色認識部112は、画像データ受信部113からカラー画像4を受信し、カラー画像4のファイル名称から、ナンバープレート座標242を取得する。ナンバープレート座標242を基準位置として、この基準位置から所定距離の車色判定エリア241を設定し、車色判定エリア241の色情報から車色を判定する。
(もっと読む)
画像処理装置、画像処理方法及び車両監視システム
【課題】 車両の追跡が容易な画像処理装置、画像処理方法および車両監視システムを提供すること。
【解決手段】 画像処理装置5は、道路10の車両進行方向に沿って複数設置される監視カメラ2からの映像信号をA/D変換して変換画像を得る。その後、画像処理装置5は、変形画像について分割領域を設定し、所定のサンプリング点に基づいて分割画像を得る。画像処理装置5は、この分割画像を道路10が連続するように合成して合成画像を得て、合成画像に基づいて車両検出を行う。その後、車両の追跡処理が行われ、車両画像や背景画像の補正を経て画像処理装置5から出力された画像データは、モニタ61に表示される。
(もっと読む)
車両検知システム
【課題】 センサの取り付け角度調整を精密に行うことなく、検知精度に優れる車両検知システムを提供する。
【解決手段】 道路100上の監視範囲10を通過する車両200を検知する車両検知システム1であり、検知対象が発する赤外線を感知するセンサ2と、センサ2から得られた入力レベル値を用いて、車両の有無を判定する車両有無判定部とを具える。センサ2として、複数のサーモパイル素子を利用する。監視範囲100には、各素子に基づく感知エリア11が複数形成される。車両有無判定部は、入力レベル値のうち、車両以外の物体が発する赤外線の量に基づく値を背景レベルとし、入力レベル値と背景レベルとの差に基づく値を比較値とし、この比較値と閾値との比較を感知エリア11ごとに行い、比較値が閾値以上となる感知エリアの数に応じて車両の有無を判定する。
(もっと読む)
特定部位抽出プログラム
【課題】環境条件によらず、車両の色を判別すべき部位を正確に抽出すること。
【解決手段】画像蓄積サーバ100は、画像データ管理部110が、白黒画像データおよびカラー画像データを取得し、取得した各画像データを特定部位抽出処理部120に渡し、特定部位抽出処理部120が、カラー画像上の車両の特徴的な部分(ナンバープレート、サイドミラー、フロントミラー、ヘッドランプ等)を検出し、検出した部分を基にして車両の特定の部位(ボンネット領域、ルーフ領域、車両側面とドア領域、トランク領域等)を検出する。
(もっと読む)
車両番号認識装置
【課題】コントラストが低い画像や、斜めに撮影され幾何歪のある画像からも確実に車両番号を認識できる車両番号認識装置を提供することにある。
【解決手段】 ナンバープレート画像から、大文字列と小文字列に挟まれる隙間領域を直線として抽出し、抽出した直線からナンバープレートの画像上での傾き角を算出し、算出された傾き角により、前記ナンバープレート画像の傾き補正を行った後、前記ナンバープレート画像に含まれる文字列領域の切り出しを行うことを特徴とする。
(もっと読む)
交通撮像装置および交通監視システム
【課題】 撮影の対象となる道路上の歩行者や運転手に不快感を与えることのない、交通撮像装置および交通監視システムを提供する。
【解決手段】 信号機1は、その外郭を外装部1Xに覆われ、そして、外装部1Xの前面には、左から、青,黄,赤の各色の光を発するための窓1A,1B,1Cを形成されている。具体的には、信号機1では、青,黄,赤の各色の光を発するダイオードが、それぞれ、窓1A,1B,1Cから光を点灯するように構成されている。外装部1Xの内部には、3台のカメラ11〜13が、レンズ11A〜13Aを窓1A〜1Cにそれぞれ対向するように、設置されている。
(もっと読む)
車両撮影方法およびその装置
【課題】 輝度値の異なる運転席の運転者とナンバープレートを同時に撮影するためには、ナンバープレートの輝度値が上がり過ぎないようにして車両全体を明るく照明するか運転席用の専用照明が必要になるといった問題があった。
【解決手段】 撮影した原画像からナンバープレートを抽出した画像を予め記憶し、原画像を所定のγ値でγ補正した画像を取得し、該γ補正画像と前記記憶されているナンバープレートの原画像とを合成することでナンバープレートのナンバーと運転席の運転者の顔を明瞭とした画像を抽出することを特徴とする車両撮影方法である。
(もっと読む)
道路利用料課金用データを収集し処理するための方法、コンピュータプログラム、システム、情報処理装置、および車両(道路利用料課金用データを収集し処理するための方法およびシステム)
【課題】 複数の車両からデータを収集し処理する方法、システム、およびコンピュータプログラム製品を提供する。
【解決手段】 各車両は、それ自体およびその位置を示すデータを送信し、他の車両からの他の送信を検出する。各交信は履歴に記録され、道路利用料課金機関にアップロードされる。課金機関200は、記録を受信すると、交信記録がアップロードされた前記車両の道路利用料金を計算して、アップロードしている前記車両が交信したと主張する前記車両の旅程情報を蓄積し、アップロードされた記録内の異常を検出する。
(もっと読む)
移動軌跡解析方法
【課題】 多くの人手間を要することなく、車両や人その他の移動体の移動軌跡に関する詳細なデータを、簡易な操作で得ることができる移動軌跡解析方法を提供する。
【解決手段】 まず、トランシット、レベル等の機材により、ターゲット(標定点)Aの基準点測量を行う。次に、3Dスキャナー22により、道路2部分について、道路構造をスキャニングし、点群データ(3次元座標)を取得する。その後、ビデオカメラ21により、車両11や歩行者等の移動体をビデオ撮影する。3Dスキャナー22により得られた点群データから、障害物あるいは不要なデータを除去し、この点群データとビデオ映像をマッチングさせる。ビデオ映像の各フレーム画像の解析から車両11等の移動軌跡を抽出する。
(もっと読む)
511 - 520 / 558
[ Back to top ]