
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
811 - 820 / 7,349
移動体衝突防止装置及び該装置を搭載した移動体
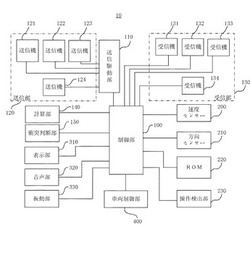
【課題】移動体の衝突を防止する移動体衝突防止装置に関する。
【解決手段】移動体に配置され、他の移動体との間で信号を送受信する移動体衝突防止装置10であって、測定波を送信する送信部120と、前記送信部に接続され、該送信部を駆動する駆動信号を生成し該送信部を駆動する送信駆動部110と、前記他の移動体から送信された測定波を受信する受信部130と、前記受信部が受信した測定波の強度により、前記移動体と前記他の移動体の間の相対位置を計算する計算部140と、前記計算部によって計算された結果に基づいて前記移動体が前記他の移動体と衝突するか否かを判断する衝突判断部150とを備える。
(もっと読む)
車両用画像処理装置および車両用画像処理方法

【課題】カメラにより取得された画像から路面の位置を求める。
【解決手段】車両用画像処理装置10は、記憶部13、路面検出部27、近似平面作成部31および路面データ更新部32を備える。記憶部13は、設定路面上の点についてカメラ座標系における画像上の座標値と光軸方向座標値とを関連付けた路面データを記憶する。路面検出部27は、スケールファクタつき相対並進成分と自車の並進成分とを用いてカメラ座標系における対象物の光軸方向座標値を算出するとともに、路面データにおいて対象物の画像上の座標値と関連付けられた光軸方向座標値を記憶部13から取得し、これらの光軸方向座標値の差が所定の路面閾値以下であると対象物を路面と判定する。近似平面作成部31は、複数の対象物のなす近似平面を表す式を立て、この近似平面上の点について近似平面データを求める。路面データ更新部32は、記憶部13の路面データを近似平面データで更新する。
(もっと読む)
走行支援装置
【課題】走行支援のための走行経路の演算を容易にし、計算コストを抑制する。
【解決手段】車両進行方向の周辺環境を認識し、認識した周辺環境に対する自車位置と自車姿勢を検出し、これら周辺環境、自車位置、及び自車姿勢を対応付けた情報を予め蓄積しておく。そして、蓄積された情報を自車位置に基づいて参照することで、自車両にとって走行可能な複数の走行経路を参照経路として設定すると共に、自車位置と自車姿勢に基づいて、自車位置から各参照経路に至るまでの導入経路を算出する。そして、導入経路の算出結果に応じて、複数の参照経路のうちの一つを選択し、選択した一つの参照経路と、この参照経路に至るまでの導入経路とを合わせて最終的な自車両の走行経路を設定する。
(もっと読む)
車両の制御装置
【課題】運転者に煩わしさを与える接触回避処理がなされることを抑制した車両の制御装置を提供する。
【解決手段】接触回避制御部17は、物体認識部11により認識された物体2の移動速度がVthを超えているときは、自車両1と物体2との距離がL以下になったときに、接触回避処理を実行し、物体2の移動速度がVth以下であって自車両1と物体2との距離がL以下になったときには、自車両1の将来進路60,61と物体2との間隔が所定間隔以上であるか否かを判断し、該間隔が該所定間隔以上であるときは、接触回避処理を実行しない。
(もっと読む)
可動物の目標状態決定装置及びプログラム
【課題】規範となる可動物状態を精度良く決定することができるようにする。
【解決手段】環境運動検出部40によって、自車両の車速を検出すると共に、周辺の可動物を検出する。衝突確率予測部41によって、自車両と、検出された周辺の可動物との将来的な衝突確率を予測する。移動規範学習部44によって、規範的な移動に関して求めた、進入速度、衝突確率、及び他の可動物の側方を通過するときの側方通過速度に基づいて、進入速度、衝突確率、及び側方通過速度の関係を学習する。軌道特徴点生成部48によって、移動規範学習部44の学習結果に基づいて、検出された進入速度及び予測された衝突確率に対する、周辺の可動物の側方を通過するときの規範となる側方通過速度を決定する。
(もっと読む)
車両の制御装置
【課題】路上物の誤検知により、運転者に違和感や煩わしさを感じさせる接触回避処理がなされることを抑制した車両の制御装置を提供する。
【解決手段】物体認識部11により認識された物体と車両1との距離が、判定距離Dth以下になったときに、物体と車両1との接触を回避するための接触回避処理を実行する接触回避制御部17を備えた車両の制御装置であって、車両1の先行車両2の通過軌跡60を認識する先行車両軌跡認識部13と、物体認識部11により認識されたパイロン4が通過軌跡60上にあるか否かを判断する物体位置判断部14と、パイロン4が通過軌跡60上にあるときの判定距離Dthを、パイロンが通過軌跡60上にないときの判定距離よりも短く設定する判定距離設定部15とを備える。
(もっと読む)
車両のアイドルストップ制御装置
【課題】実際の運転シーンに即して、不要なアイドルストップのみを適切に抑制してアイドルストップによる燃費の低減や、排気ガスの低減の効果を十分に得る。
【解決手段】通常、予め設定しておいたアイドルストップ実行条件が成立した場合に、エンジン制御装置50に信号を出力して、エンジン2のアイドル運転を停止してエンジン2を自動停止させるアイドルストップを行わせるが、自車両1の前方環境情報と障害物情報と停止するまでの自車両1の運転状態の少なくとも一つに応じて自車両1が障害物に対して危険回避のための車両停止を実行したか否かを判断し、自車両1が障害物に対して危険回避のための車両停止を実行したと判断した場合は、エンジンの自動停止を禁止する。
(もっと読む)
歩行者認識装置
【課題】照合するパターン数が少なくコストを削減した構成により、精度よく歩行者を認識する。
【解決手段】画像認識処理部4の部位特定手段により、測距レーダ2、単眼カメラ3で検出された自車両1の周辺の障害物が歩行者6であるとした場合の部位を特定し、画像認識処理部4の姿勢判定手段により、特定した部位の姿勢変化を予測して記憶部5から読み出した歩行者6の当該部位の予測された姿勢と、部位特定手段が特定した部位の姿勢との照合から、特定した部位の動きが歩行者の動きに合致するか否かを判定し、画像認識処理部4の認識手段により、姿勢判定手段の判定結果に基づいて障害物が歩行者であるか否かを判定して歩行者を認識する。
(もっと読む)
画像認識装置
【課題】車載式の画像認識装置において画像認識処理に係るトータル処理時間を短縮可能な技術を提供する。
【解決手段】車載されたカメラにより撮像された画像データへの画像認識処理の結果に基づき運転者に対して情報提供を行う画像認識装置であって、画像認識処理は、画像データに含まれる特定のターゲットを認識するターゲット認識処理と、ターゲット認識処理によるターゲットの認識を補助するためにターゲット認識処理に先行して行われる前段処理とを含んでいる。また、カメラは少なくとも、画像データを生成する画像センサと、画像センサが生成した画像データであって前段処理が施される前の元画像データに対して前段処理を施す前段処理部とを有する。
(もっと読む)
運転支援装置
【課題】自車両が合流車線を走行している場合に、自車両に対して割込みを許容する意思表示をしている本線走行中の他車両の位置を運転者に対して通知することができる運転支援装置を、提供する。
【解決手段】制御ECU1は、ナビゲーションシステム18から自車両の現在位置及び当該現在位置近傍の道路レイアウトを示す地図を取得して、表示部17上に当該地図を表示するとともに自車両の現在位置を示す指標をスーパーインポーズする。また、制御ECU1は、後方ミリ波レーダ15及び後方画像センサ16から入力された信号を解析することで、本線上の車両の位置を検出して、表示部17上に表示される地図上に本線上の車両の位置を示す指標をスーパーインポーズするとともに、本線上の車両のうちパッシングを行った車両を検出し、当該車両の指標の表示を変更する。
(もっと読む)
811 - 820 / 7,349
[ Back to top ]