
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
841 - 850 / 7,349
車両の前方障害物検出装置
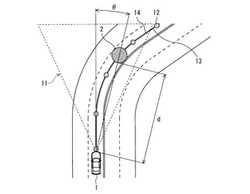
【課題】車両の前方障害物検出装置に関し、自車両の前方のカーブ路に存在する障害物を検出できるようにする。
【解決手段】自車両1の前方の物体を検出する前方検出手段と、前記自車両の走行する前方の道路形状に対応した前方道路領域13を算出する前方道路領域算出手段28と、前記前方検出手段により検出された前記前方の物体の前記自車両に対する位置と、前記前方道路領域算出手段により算出された前記前方道路領域13とに基づいて、前記前方道路領域13の範囲内に前記前方の物体がある場合に、前記前方の物体が前記自車両の走行する道路又は車線の前方に存在する障害物であると判定する前方障害物判定手段とを有する。
(もっと読む)
車両用画像処理装置および車両用画像処理方法

【課題】自車の曲進および振動による影響を考慮して対象物との衝突可能性を判定する車両用画像処理装置および車両用画像処理方法を提供する。
【解決手段】車両用画像処理装置において、カメラ11は、車両の周辺を撮像する。動きベクトル算出部21は、カメラ11により撮像された複数の画像間の動きベクトルを求める。スケールファクタ付き並進成分算出部23は、画像に含まれる対象物に対応する動きベクトルと車両の回転成分とにもとづいて、スケールファクタ付き並進成分を算出する。z位置取得部26は、カメラ座標系における対象物の光軸方向座標値を取得する。衝突判定部25は、カメラ11の中心から対象物までの距離を時間の関数としてあらわした式にもとづいて、カメラ11の中心から対象物までの最近接距離が所定の距離以下であるか否かを判定する。衝突危険度判定部28は、最近接距離が所定の距離以下であると、車両と対象物が衝突すると判定する。
(もっと読む)
データ記録装置、及び、データ記録方法
【課題】事故に繋がる可能性のある位置を特定する。
【解決手段】データ記録装置1においては、各種の情報取得装置42〜48を用いて車両のドライバの生体情報を取得し、その生体情報に基づいてドライバの緊張感が高まる心理状態の変化を生体イベントとしてイベント検出部23が検出する。一方で、車両の現時点の位置を特定可能な位置情報として車外画像及び経緯度情報も取得される。そして、生体イベントが発生した場合は、記録制御部24が、イベントの発生時点において取得された位置情報をメモリカード9に記録する。したがって、運転中のドライバの緊張感が高まった位置を事後的に把握することができ、事故に繋がる可能性のある位置を特定することができる。
(もっと読む)
車両制御装置
【課題】見通しの悪いブラインドコーナーにおいて、適切な低燃費速度パターンを生成する車両制御装置を提供する。
【解決手段】本発明に係る車両制御ECU2(車両制御装置)は、車両1がこれから走行する走行経路に関する情報である目標走行経路情報を取得する目標走行経路情報取得部21と、目標走行経路情報に基づいて進行方向の見通し距離を算出する見通し距離算出部22と、見通し距離に基づいて上限速度を設定する上限速度設定部23と、上限速度に基づいて速度パターンを生成する速度パターン生成部24と、を備える。
(もっと読む)
接触可能性検知装置、接触可能性検知方法、及びプログラム
【課題】対象車両の自車両への接触の可能性の有無の判定精度を向上させる。
【解決手段】測距部11は、自車両と対象車両との間の距離の計測を行う。方位角変化率算出部12は、自車両に搭載されている車載カメラ2が対象車両を撮像して得た時系列の撮像画像に基づいて、当該対象車両の水平線方向の端部を当該自車両から見たときの方位角の時間変化率を算出する。そして、判定部13は、測距部11により計測された距離と、方位角変化率算出部12により算出された、前述の方位角の時間変化率とに基づいて、対象車両の自車両への接触の可能性の有無を判定する。
(もっと読む)
覚醒度判定装置、覚醒度判定方法及びプログラム
【課題】ドライバーの覚醒度の低下を正確に検出する。
【解決手段】車両を運転するドライバーの顔が写る画像に基づいて、ドライバーの両眼の視線によって規定される輻輳角を順次算出する(ステップS206)。そして、算出した輻輳角の標準偏差に基づいて、車両を運転するドライバーの覚醒度が低下した状態であるか否かを判定する(ステップS208)。このため、ドライバーの眼の開度と覚醒度との間に相関がない場合であっても、ドライバーの覚醒度の低下を正確に検出することができる。これにより、正確に、ドライバーに警報を発令することが可能となる。
(もっと読む)
通信装置
【課題】ユーザが安心・安全に信号機が設置された交差点を通過・通行できるように支援する通信装置を提供する。
【解決手段】他の通信装置と通信を行う通信装置であって、少なくとも信号機の現在の信号表示情報及び信号機の信号表示方向の方位角を含む信号機情報を受信する通信部と、前記通信装置の進行方向の方位角と、前記信号機の信号表示方向の方位角と、に基づいて方位角差を算出し、前記方位角差に基づいて報知設定すると共に、前記信号機の現在の信号表示情報に基づいて報知部を制御して前記報知設定に基づく報知を行う制御部と、を備える。
(もっと読む)
車両表示装置及び視線誘導装置
【課題】運転上の安全性を確保しつつ、運転者の注視を適切に案内する。
【解決手段】インストルメントディスプレイ2上に表示されている複数の画像のうち、特に運転者に対して安全上注視させるべき注視映像を選択し、運転者の視線を注視映像に誘導するようマーカ107を移動表示させる。計器画像101を基点として注視映像の表示領域までの移動ライン108に沿って、マーカ107が流れ星のように移動させて表示される。いずれの車両周囲映像103〜106が注視映像に選択された場合でも、上記移動ライン108は、運転状態にある運転者の集中視野21の周辺に位置する周辺視野22の範囲内に描画される。
(もっと読む)
分岐路進入判定装置
【課題】 分岐路が存在することを的確に検出し、自車両が検出した分岐路に進入することを的確に判定可能な分岐路進入判定装置を提供する。
【解決手段】分岐路進入判定装置1は、自車両MCの左側および右側の車線Ll、Lrを検出する車線検出手段2と、検出された車線の自車両の進行方向の実空間上の長さと幅とを検出する長さ幅検出手段3と、長さ幅検出手段3による検出結果に基づいて車線の線種を判定するとともに自車両が走行している走行レーンの区分を判定する走行区分判定手段4と、実線であった車線が所定の長さおよび所定の幅の破線BLに変化した場合に変化した車線の側に分岐路Bが存在することを検出する分岐路検出手段5と、分岐路が検出されている間に自車両が分岐路に向かう移動または分岐路方向にウィンカ操作が行われた場合に自車両が分岐路に進入すると判定する分岐路進入判定手段6と、を備える。
(もっと読む)
運転負荷予測システム、装置、方法およびプログラム
【課題】 運転負荷のパターンの比較(パターンマッチング)を利用することにより、少ない演算処理量で運転負荷を予測することのできる運転負荷予測システムを提供する。
【解決手段】 運転負荷予測装置1は、履歴蓄積部6と区間決定部9とパターン比較部10とパターン予測部11を備える。履歴蓄積部6には、所定の走行経路を過去に走行したときに取得された運転負荷パターン(運転負荷パターン履歴)が蓄積される。区間決定部9は、運転負荷の予測を行う対象経路区間と、その予測の基準として用いられる基準経路区間を決定する。パターン比較部10は、新たに走行経路を走行するときの運転負荷のパターン(参照運転負荷パターン)を運転負荷パターン履歴と比較する。パターン予測部は11、基準経路区間の参照運転負荷パターンと最もパターンが類似する運転負荷パターン履歴に基づいて、対象経路区間の運転負荷のパターンを予測する。
(もっと読む)
841 - 850 / 7,349
[ Back to top ]