
国際特許分類[G09B29/10]の内容
物理学 (1,541,580) | 教育;暗号方法;表示;広告;シール (131,780) | 教育用または教示用の器具;盲人,聾者または唖者の教習,または意志を通じるための用具;模型;遊星儀;地球儀;地図;図表 (19,563) | 地図;図面;海図;線図,例.道路線図 (13,829) | 地点指示スポットまたは座標による位置指示器;地図の読取り補助具 (6,401)
国際特許分類[G09B29/10]に分類される特許
961 - 970 / 6,401
情報処理システム、地図情報表示装置、サーバ、情報処理方法、及びプログラム
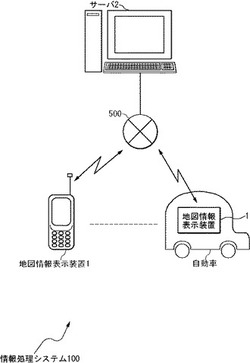
【課題】他人の訪問位置を出力できる地図情報表示装置を含む情報処理システムを提供する。
【解決手段】情報処理システム100は、2以上の地図情報表示装置1と、サーバ2とを備える。地図情報表示装置1は、訪問位置を取得してサーバ2に送信すると共に、サーバ2から送信された訪問位置を受信して出力する。サーバ2は、地図情報表示装置1から送信された訪問位置を受信し、その訪問位置の受信に応じて、受信された訪問位置を少なくとも有する訪問情報を更新する。また、サーバ2は、その訪問情報に含まれる訪問位置を取得して地図情報表示装置1に送信する。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラム

【課題】ユーザが地点に対して付与したコメントを利用して作成された地点情報に基づいて、走行ルートを適切に設定する。
【解決手段】ナビゲーション装置は、ユーザが地点に付与したコメントを含むコメント情報を取得するコメント情報取得手段と、コメント情報から固有表現を抽出する固有表現抽出手段と、地点に対して固有表現の情報を対応付けた地点情報を記憶する地点情報記憶手段と、地点情報を用いて地点の特徴度を算出する特徴度算出手段と、走行ルートの探索に関する条件を取得するユーザ条件取得手段と、ユーザが指定した条件に応じて、特徴度に基づいて走行ルート候補を順位付けする走行ルート候補順位付け手段と、を備える。これにより、ユーザが地点に対して付与したコメントにより作成された地点情報に基づいて、走行ルート候補を適切に順位付けすることができる。
(もっと読む)
ナビゲーション装置およびプログラム
【課題】駐車場の利便性に関する情報を作成可能なナビゲーション装置およびプログラムを提供する。
【解決手段】ナビゲーション装置は、設定された目的地に対応する目的地駐車場に車両2が駐車されていた駐車期間を特定し(S104)、ユーザと共に移動するGPS受信端末95における衛星からの電波の受信状態を取得する(S105)。そして、駐車期間における受信状態に基づき、目的地駐車場と目的地との間の移動が屋内を通った移動であるか否かを判断する。駐車場と目的地との間の移動が屋内を通った移動であると判断された場合(S106:YES、S109:YES)目的地駐車場が屋内移動駐車場であると特定し(S110)、屋内移動フラグをセットする(S112)。これにより、屋内移動駐車場を案内や、目的地までの移動を考慮した駐車場の案内や、地図データの作成等ができ、ユーザの利便性が向上する。
(もっと読む)
ナビゲーション装置及びプログラム
【課題】 経路案内においてヘディングアップ表示を好む運転者にとって、違和感の少ない地図表示を実現し、しかも、走行中における地図の回転を抑えた地図表示を行うナビ−ゲーション装置を提供する。
【解決手段】 目的地が設定され、経路探索が行われた後、対象経路が特定される。そして、対象経路毎に、地図表示の向きが決定される。具体的には、対象経路を複数の区間に分割され(S200)、各区間における「車両の進行方位」が取得されて(S210)、車両位置から取得された「車両の進行方位」のうちで最も多く取得された方位が画面上辺に対して垂直方向上向きと合致するように地図表示が行われる。また、経由地がある場合には、経由地で分割された経路が「対象経路」とされる。
(もっと読む)
ランドマーク識別のための自動標識付け
【課題】画像においてランドマークを識別する方法を提供する。
【解決手段】作業現場の画像を受け取り、この画像において示唆された作業現場の特徴の識別を判定するために画像を分析する。作業現場の特徴の示唆された識別を、通信ユニットを通じて送る。確認された識別を形成するために、作業現場の特徴の示唆された識別を受け取る。確認された識別、およびこの確認された識別と関連のある複数の属性を、データベースに格納する。
(もっと読む)
ナビゲーション装置、車載表示システム及び地図表示方法
【課題】実際の運転に即して走行上注意すべき位置を案内することができるナビゲーション装置を提供する。
【解決手段】ドライブレコーダは、車両に搭載されて事故などの所定のイベントの発生を検知し、そのイベントが発生した時点の車両の位置である「イベント発生位置」を記録する。ナビゲーション装置は、ドライブレコーダで記録された「イベント発生位置」を取得し、ディスプレイ13に表示する地図の範囲内に「イベント発生位置」があれば、その位置に警告マーク42を重畳する。これにより、実際にイベントが発生した位置が地図上に示されるため、実際の運転に即して走行上注意すべき位置を案内することができる。その結果、ユーザはその位置を意識した運転を行うことができ、安全性が向上する。
(もっと読む)
自律移動装置
【課題】障害物が存在しなくても進入を回避すべき領域を自律的に回避して移動することが可能な自律移動装置を提供する。
【解決手段】自律移動装置は、周囲の障害物情報を取得するレーザレンジファインダ13と、障害物が存在する障害物領域を示す環境地図211、及び、進入を禁止する進入禁止領域を示す進入禁止領域地図212を記憶する記憶部21と、レーザレンジファインダ13によって取得された障害物情報と環境地図211とを用いて自己位置を推定する自己位置推定部25と、推定された自己位置、環境地図211、及び進入禁止領域地図212に基づいて、障害物領域及び進入禁止領域を回避して目的地まで自律移動するように制御する移動制御部28とを備える。
(もっと読む)
目的地予測装置、目的地予測方法、交差点進行方向推定装置および交差点進行方向推定方法、三次元地図表示システム、三次元地図表示方法
【課題】ユーザが向かおうとする目的地を簡易かつ的確に予測する目的地予測装置、交差点におけるユーザの進行方向を簡易かつ的確に推定する交差点進行方向推定装置、上記推定結果を反映した三次元地図を表示する三次元地図表示システムを実現する。
【解決手段】クライアント100はサーバ200からユーザが選択的に設定した進行方向の視野に該当する三次元地図表示用データの供給を受けて、その表示部150にその三次元地図を表示する三次元地図表示システムであって、サーバ200はクライアント100側の目的地算出部170で算出した目的地の予測データの供給を受け、更に自己が保有するエリア、パス、交差点の地図情報を勘案して、その交差点進行方向推定部270で、ユーザの操作を待たずに交差点における進行方向を予測してその方向の三次元地図表示のためのデータを生成し、該生成したデータをクライアント100に供給する。
(もっと読む)
公図取得支援方法
【課題】必要な公図を効率よく取得する。
【解決手段】公図取得支援装置1は、基準地点を、起点SPから起点終点角度の方向へ移動単位距離の位置に移動し、緯度と経度を求める。基準地点を中心とする公図範囲内で、直線上の住所をチェックする。直線上に字境(例えば、字Aと、字Bとの間の境界線)があれば、その交点(例えば、地点P3)に基準地点を移動し、緯度と経度を求め、その先の住所(例えば、字B)を取得し、取得住所データとして記憶し、基準地点をさらに公図範囲サイズの1/2の位置(例えば、地点P4)に移動し、緯度と経度を求める。一方、直線上に字境がなければ、基準地点(例えば、地点P4)をさらに移動単位距離の位置(例えば、地点P5)に移動し、緯度と経度を求める。基準地点が終点EPを越えていなければ、公図範囲内の住所チェックを行う。終点EPを超えていれば、取得した住所を取得住所データから読み出し、出力する。
(もっと読む)
車載用電子機器
【課題】メニュー画面等の操作画面が表示され、現在地マークが表示されていない場合であっても、車両が現在走行している地域を把握することが可能な車載用電子機器を提供する。
【解決手段】現在地を検出する現在地検出装置19と、出発地から目的地に至る経路を探索する経路探索部11aと、経路に従って経路案内を行う経路案内部11bと、現在地に基づいて地図画像を作成する地図画面作成部11cと、現在地を表す現在地画像を作成する現在地画像作成部11dと、現在地画像を含み、所定の操作を受け付けるための操作画像を作成する操作画面作成部11eと、地図画像と操作画像とを選択的に表示する液晶モニタ17と、を備えるナビゲーション装置1。
(もっと読む)
961 - 970 / 6,401
[ Back to top ]