
タッチセンサ及び電子機器
【課題】簡単な構成で、タッチパネルに装着された振動素子の周波数特性の変化を補償する。
【解決手段】タッチセンサ39は、タッチパネル7と、第1振動素子9A及び第2振動素子9Bと、素子駆動部37とを備えている。第1振動素子9A及び第2振動素子9Bは、タッチパネル7に装着されている。素子駆動部37は、タッチパネル7が操作されれば駆動信号を用いて第1振動素子9A及び第2振動素子9Bを振動させる。素子駆動部37は、第1振動素子9Aを振動させつつ第2振動素子9Bからの検出信号を取得することで、第1振動素子9A及び第2振動素子9Bを振動させるための共振周波数を探索して、駆動信号の周波数を決定する。
【解決手段】タッチセンサ39は、タッチパネル7と、第1振動素子9A及び第2振動素子9Bと、素子駆動部37とを備えている。第1振動素子9A及び第2振動素子9Bは、タッチパネル7に装着されている。素子駆動部37は、タッチパネル7が操作されれば駆動信号を用いて第1振動素子9A及び第2振動素子9Bを振動させる。素子駆動部37は、第1振動素子9Aを振動させつつ第2振動素子9Bからの検出信号を取得することで、第1振動素子9A及び第2振動素子9Bを振動させるための共振周波数を探索して、駆動信号の周波数を決定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、タッチセンサ及び電子機器、特に、操作者に操作感をフィードバック可能なタッチセンサ及び電子機器に関する。
【背景技術】
【0002】
タッチパネル上に液晶画面によってスイッチなどの操作部を表示して、ユーザの指での操作を可能としたユーザインタフェースが多くの分野で利用されている。
【0003】
また、ユーザに対して、タッチパネルを操作した時に実際の物理的なスイッチを動かしたような操作感を与えるために、振動又は音を発生させるインタフェースが考案されている。例えばタッチパネルの周囲に圧電アクチュエータを装着して、ユーザがタッチパネル上の操作ボタンを押した場合に振動又は音を発生させることで、実際の物理的なボタンの操作と同様の操作感を提供する(例えば、特許文献1を参照。)。
圧電アクチュエータは、チタン酸バリウム等のセラミックスからなる。セラミックスに圧力を加えると電圧が発生し、その反対に、セラミックスに電圧を印加するとセラミックスが変形を起こす。このような圧電効果を用いることで、圧電アクチュエータに振動を発生させている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2011−30290号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
振動素子の製造誤差又は取付誤差によって、タッチパネル装置における周波数特性にバラツキが生じることがある。また、使用温度によっても、振動素子の周波数特性が変化する。つまり、従来のタッチパネル装置では共振周波数がずれやすく、同じ強さの操作感をフィードバックすることが困難であった。
【0006】
本発明の課題は、簡単な構成で、タッチパネルに装着された振動素子の周波数特性の変化を補償することで、発生する操作感を均一にすることにある。
【課題を解決するための手段】
【0007】
以下に、課題を解決するための手段として複数の態様を説明する。これら態様は、必要に応じて任意に組み合せることができる。
【0008】
本発明の一見地に係るタッチセンサは、タッチパネルと、第1振動素子及び第2振動素子と、駆動制御部とを備えている。
第1振動素子及び第2振動素子は、タッチパネルに装着されている。
駆動制御部は、タッチパネルが操作されれば、駆動信号を用いて第1振動素子及び第2振動素子を振動させる。
駆動制御部は、第1振動素子を振動させつつ、第2振動素子からの検出信号を取得することで、第1振動素子及び第2振動素子を振動させるための共振周波数を探索して、駆動信号の周波数を決定する。
この装置では、第1振動素子と第2振動素子を用いて第1振動素子及び第2振動素子を振動させるための共振周波数が探索されて、その結果、駆動信号の周波数が決定される。したがって、簡単な構成によって、振動素子の周波数特性の変化を補償できる。
【0009】
駆動制御部は、第1振動素子及び第2振動素子を振動させるための共振周波数を探索して駆動信号の周波数を決定するために、スイープサイン信号を第1振動素子に与えてもよい。
例えば、電子機器の電源投入時又はhaptics機能ON時に、スイープサイン信号を用いて共振周波数を検出して、その共振周波数を駆動信号の周波数に設定できる。
【0010】
駆動制御部は、タッチパネルの所定領域が操作されれば、第1振動素子に探索用駆動信号を供給してもよい。
この装置では、タッチパネルの操作のタイミングで探索用駆動信号が第1振動素子に供給されるので、周波数特性の変化をきめ細かく補償できる。また、所定領域以外が操作されれば駆動信号が第1振動素子及び第2振動素子に供給されるので、周波数特性の補償の場合と通常の場合とを使い分けることができる。
【0011】
所定領域は、第1振動素子が単独で所定以上の強度の振動を発生可能な領域であってもよい。
この装置では、第1振動素子のみを振動させても、十分な大きさの振動が得られる。
【0012】
駆動制御部は、検出信号の強度が駆動信号を用いた場合に得られるはずの検出信号の強度より大きければ、探索用駆動信号の周波数を新たな駆動信号の周波数に設定してもよい。
この装置では、駆動信号の強度より大きな検出信号を発生する探索用駆動信号が見つかれば駆動信号の周波数が更新されるので、駆動信号の周波数を共振周波数に近づけることができる。
【0013】
駆動制御部は、検出信号の強度が前回得られた検出信号の強度より大きければ次回の探索用駆動信号の周波数を設定する高低向きを前回と反対側にし、検出信号の強度が前回得られた検出信号の強度より小さければ次回の駆動信号の周波数を設定する高低向きを前回と同じ側にしてもよい。
この装置では、検出信号の強度が大きい側に探索用駆動信号を設定していくので、探索用駆動信号の周波数が共振周波数に徐々に近づく。
【0014】
本発明の他の見地に係る電子機器は、上記のタッチセンサを有する。
電子機器は、上述の作用効果を得ることができる。
【発明の効果】
【0015】
本発明に係るタッチセンサ及び電子機器では、簡単な構成で、タッチパネルに装着された振動素子の周波数特性の変化を補償でき、その結果、発生する操作感を均一にできる。
【図面の簡単な説明】
【0016】
【図1】タブレット型コンピュータの平面図、A−A断面図、及びB−B断面図。
【図2】図1の部分拡大図。
【図3】タブレット型コンピュータの制御構成を示すブロック図
【図4】素子駆動部のハードウェア構成を示すブロック図
【図5】単一駆動領域を示すタッチパネル装置の概略平面図
【図6】haptics強度の測定方法を説明するための概略模式図
【図7】haptics機能がONになっているときの制御動作を示すフローチャート。
【図8】クリック波形を示すグラフ。
【図9】スイープサイン信号による共振検出制御のフローチャート。
【図10】リアルタイム共振検出制御動作を示すフローチャート。
【図11】一方の振動素子を駆動させて他方の振動素子の圧電信号を測定したときの周波数特性を示すグラフ。
【図12】リアルタイム共振検出の第1実施例のグラフ。
【図13】リアルタイム共振検出の第2実施例のグラフ。
【発明を実施するための形態】
【0017】
(1)タブレット型コンピュータ
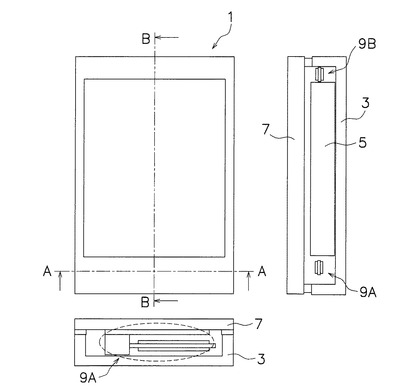
図1を用いて、本発明の一実施形態としてのタブレット型コンピュータ1(電子機器の一例)を説明する。図1は、タブレット型コンピュータの平面図、A−A断面図、及びB−B断面図である。図2は、図1の部分拡大図である。
【0018】
タブレット型コンピュータ1は、主に、ケース3と、ディスプレイ5と、タッチパネル7とを有している。ケース3は例えばプラスチック製の箱形部材である。ディスプレイ5は、例えば、液晶ディスプレイであり、ケース3内に配置されている。タッチパネル7は、例えば、静電容量方式のタッチパネルであり、ケース3に装着されている。
【0019】
図3に示すように、タブレット型コンピュータ1は、制御部31を有している。制御部31は、タッチパネル7に信号が入力されると、それに基づいて情報処理を行い、さらにディスプレイ5に各種表示を行わせる。制御部31は、CPU、RAM、ROM等からなりプログラムを実行するコンピュータである。
【0020】
(2)振動素子
タブレット型コンピュータ1は、さらに、第1振動素子9A及び第2振動素子9Bを有している。第1振動素子9A及び第2振動素子9Bは、圧電効果を実現するための部材である。第1振動素子9A及び第2振動素子9Bは、タッチパネル7の裏面に装着されている。第1振動素子9A及び第2振動素子9Bは、タッチパネル7の両端に離れて装着されている。
【0021】
図2を用いて、第1振動素子9Aの構造を詳細に説明する。第1振動素子9Aは、DMA(Distributed Mode Actuator)であり、2枚の圧電素子を貼り合わせた構造であり、2枚の圧電素子のそれぞれに差動的な電圧を加えると伸縮方向が反対になるため反りが生ずる現象を利用している。第1振動素子9Aは、主に、第1金属板11と、ピエゾ素子13,15とを有している。ピエゾ素子13,15は、第1金属板11の両面に貼りつけられている。これら部材は、一方向に長く延びる短冊状の部材である。第1振動素子9Aは、さらに、樹脂成型物17と、第2金属板19とを有している。樹脂成型物17はブロック状の部材であり、第1金属板11の一端が固定されている。また、樹脂成型物17は、第2金属板19の一端側の平面に固定されている。第2金属板19は、第1金属板11と同様に一方向に長く延びる短冊状の部材である。第2金属板19は、両面テープ21によって、タッチパネル7の裏面に固定されている。
【0022】
以上のようにして、第1金属板11及びピエゾ素子13,15からなる振動体が片持ち状態でタッチパネル7の裏面に固定されている。電圧が加えられるとピエゾ素子13,15は画面内方向に延伸することで、第1金属板11に撓み振動が発生する。この振動は、樹脂成型物17及び第2金属板19を介して、タッチパネル7に伝達される。
なお、第2振動素子9Bの構造は第1振動素子9Aの構造と同じであるので、ここでは説明を省略する。
【0023】
(3)制御部
図3を用いて、制御部31の構成を説明する。図3は、タブレット型コンピュータの制御構成を示すブロック図である。図に示すように、制御部31は、入力位置判定部33と、表示制御部35と、素子駆動部37とを有する。これら機能は、ソフトウェア及びハードウェアで実現される。入力位置判定部33は、タッチパネル7に人間の指が触れると、タッチパネル7からの検出信号に基づいて指が触れた位置を判定する。この判定情報を用いて、制御部31はタブレット型コンピュータ1としての機能を実行する。表示制御部35は、ディスプレイ5に各種情報を表示する。素子駆動部37は、第1振動素子9A及び第2振動素子9Bに駆動信号を送信して、それらを振動させる。また、素子駆動部37は、後述するように、第2振動素子9Bで検出された検出信号を受信する機能を有している。
上述のタッチパネル7と、第1振動素子9A及び第2振動素子9Bと、素子駆動部37とによって、タッチセンサ39が構成されている。
【0024】
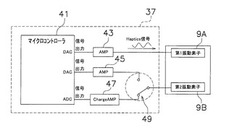
図4を用いて、素子駆動部37を詳細に説明する。図4は、素子駆動部のハードウェア構成を示すブロック図である。素子駆動部37は、マイクロコントローラ41を有している。マイクロコントローラ41は、第1振動素子9A及び第2振動素子9Bにhaptics信号を送信することができ、さらに第2振動素子9Bから検出信号を受信可能である。より具体的には、マイクロコントローラ41は、第1振動素子9A及び第2振動素子9Bにhaptics信号を送信する一対のDAコンバータ(DAC)と、第2振動素子9Bから検出信号を受信可能なADコンバータ(ADC)とを有している。
素子駆動部37は、さらに、第1アンプ43、第2アンプ45、チャージアンプ47と、スイッチ49とを有している。第1アンプ43は、第1振動素子9Aに接続されている。第2アンプ45及びチャージアンプ47は、第2振動素子9Bに対してスイッチ49を介して接続されている。スイッチ49は、第2振動素子9Bの接続先を、第2アンプ45とチャージアンプ47との間で切り替えることができる。
【0025】
第2アンプ45と第2振動素子9Bが接続されている状態では、マイクロコントローラ41からhaptics信号が第1振動素子9A及び第2振動素子9Bに供給可能である。チャージアンプ47と第2振動素子9Bが接続されている状態では、マイクロコントローラ41からhaptics信号が第1振動素子9Aにのみ供給され、第2振動素子9Bが振動を電圧に変換することで検出信号を得て、その検出信号がマイクロコントローラ41に供給されることが可能である。
【0026】
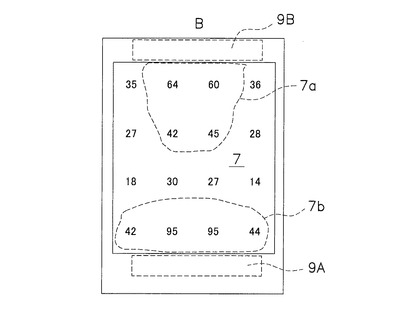
図5を用いて、タッチパネル7における単一駆動領域7a、7bを説明する。図5は、単一駆動領域を示すタッチパネル装置の概略平面図である。
単一駆動領域7a、7bは、第1振動素子9Aのみを振動させたときに操作者の指に対して十分な大きさの触感を与える振動を発生できる領域である。言い換えると、単一駆動領域7a、7b以外の領域は、十分な大きさの触感を与えるためには第1振動素子9A及び第2振動素子9Bの両方を振動させることが必要又は望ましいことになる。
【0027】
図5に示すタッチパネル7上の数字は、第1振動素子9Aのみを共振周波数で振動させたときのタッチパネル面内のhaptics強度のバラツキの一例を示している(単位はmN)。このバラツキは、タッチパネルの厚み、材質、タッチパネルとケースの間の空気による空気バネ、ケースに対するタッチパネルの固定状態によって決まる。したがって、図5に示す単一駆動領域の設定は各機種で異なることがある。なお、発明者からの経験から40mN程度であれば指に十分に強い触感を与えることができるので、それらの領域を単一駆動領域としている。
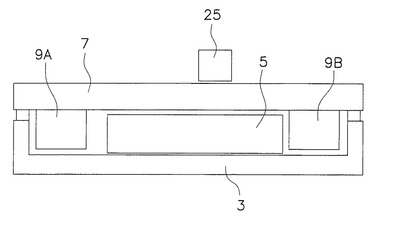
図6を用いて、haptics強度の測定方法を説明する。図6は、haptics強度の測定方法を説明するための概略模式図である。図に示すように、フォースセンサ25をタッチパネル7の表面に押し当てて振動を検出し、その強度をhaptics強度とする。haptics強度は制御部31に取り込まれ、制御部31が単一駆動領域7a、7bを決定する。
【0028】
(4)haptics機能
図7を用いて、タブレット型コンピュータ1のhaptics制御動作を説明する。図7は、haptics機能がONになっているときの制御動作を示すフローチャートである。
【0029】
電源投入又はhaptics機能ON操作によって、haptics機能がON状態になれば、図7の制御動作が開始される。
ステップS1では、スイープサイン信号による共振検出が実行される(後述)。つまり、電源投入又はhaptics機能ON操作時に、スイープサイン信号による共振検出が実行される
【0030】
ステップS2では、マイクロコントローラ41は、haptics機能がOFFになっているか否かを判断する。「Yes」であればプロセスは終了し、「No」であればプロセスをステップS3に移行する。
ステップS3では、マイクロコントローラ41は、入力位置判定部33からの判定結果に基づいて、入力が検出された否かを判断する。「Yes」であればプロセスはステップS4に移行し、「No」であればプロセスはステップS2に戻って、次の入力を待つ。
【0031】
ステップS4では、マイクロコントローラ41は、入力位置判定部33からの位置座標に基づいて、入力位置が単一駆動領域7a、7bであるか否かを判断する。「Yes」であればプロセスはステップS5に移行し、「No」であればプロセスはステップS6に移行する。
ステップS5では、リアルタイム共振検出が実行される。つまり、haptics機能ON時に単一駆動領域に入力がされれば、リアルタイム共振検出が実行される(後述)。
【0032】
ステップS6では、マイクロコントローラ41は、スイッチ49によって第2振動素子9Bを第2アンプ45に接続した状態とした上で、第1振動素子9A及び第2振動素子9Bに駆動信号での周波数のサイン波で駆動させる。その結果、振動によるクリックが発生する。
なお、クリック波形としては、図8に示すように、図8上側の駆動周波数にエンベロープをかけて得られた図8下側のものが用いられる。
【0033】
ステップS5及びステップS6が終了すると、プロセスはステップS2に戻って次の入力を待つ。
【0034】
(5)スイープサイン信号による共振検出(図7のステップS1)
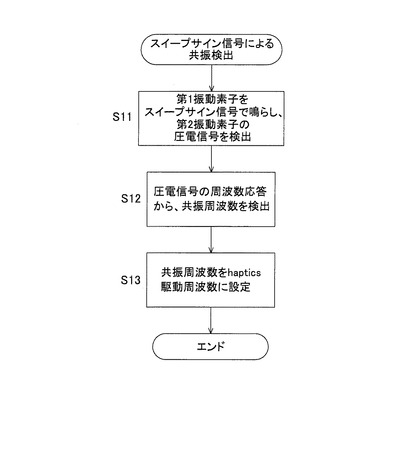
図9を用いて、スイープサイン信号による共振検出制御を説明する。図9は、スイープサイン信号による共振検出制御のフローチャートである。
【0035】
ステップS11では、マイクロコントローラ41は、スイッチ49を操作して第2振動素子9Bをチャージアンプ47に接続しておき、その状態でスイープサイン信号を第1振動素子9Aに供給する。スイープサイン信号は、周波数を連続的に変化させたサイン波である。さらに、マイクロコントローラ41は、第2振動素子9Bで発生した圧電信号を、検出する。
【0036】
ステップS12では、マイクロコントローラ41は、圧電信号をFFT解析して、各周波数の信号強度を算出する。つまり、圧電信号の周波数応答から共振周波数が検出される。
ステップS13では、マイクロコントローラ41は、共振周波数を駆動周波数に設定する。
【0037】
なお、スイープサイン信号の代わりに、様々な周波数が一定の割合で含まれたノイズ信号が用いられてもよい。ただし、上記の駆動信号の周波数の設定は、タッチパネルの操作中には行われないことが好ましい。スイープサイン信号又はノイズ信号で生じる振動又は音が、タッチパネル操作の邪魔となるからである。
【0038】
(6)リアルタイム共振検出
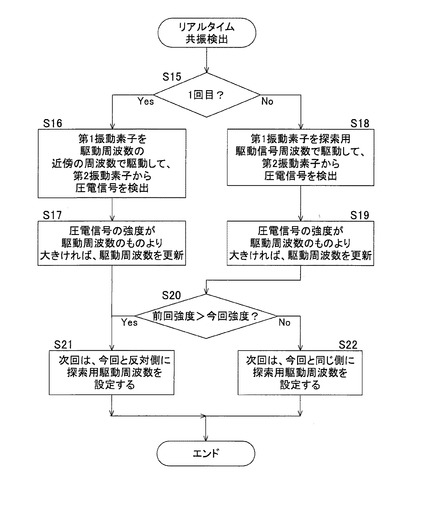
図10を用いて、リアルタイム共振検出を説明する。図10は、リアルタイム共振検出制御動作を示すフローチャートである。
ステップS15では、マイクロコントローラ41は、駆動信号が図8のステップS1で設定された後での第1回目のリアルタイム共振検出であるか否かを判断する。「Yes」であればプロセスはステップS16に移行し、「No」であればプロセスはステップS18に移行する。
【0039】
ステップS16では、マイクロコントローラ41は、スイッチ49を操作して第2振動素子9Bをチャージアンプ47に接続しておき、その状態で駆動信号の周波数の高い側又は低い側にわずかにずれた周波数の信号を第1振動素子9Aに供給する。さらに、マイクロコントローラ41は、第2振動素子9Bで発生した圧電信号をADCで検出する。
【0040】
ステップS17では、マイクロコントローラ41は、圧電信号の強度が駆動信号の周波数で駆動されたときの圧電信号の強度より大きければ、駆動信号の周波数を更新する。つまり、この場合はすでに駆動信号の共振周波数がずれていることが分かるので、より大きな信号強度をもたらす周波数を仮の共振周波数として選択する。ステップS17が終了すると、プロセスは終了する。
【0041】
ステップS18では、マイクロコントローラ41は、スイッチ49を操作して第2振動素子9Bをチャージアンプ47に接続しておき、先の探索用駆動周波数から更新されて得られた探索用駆動周波数の探索用駆動信号を第1振動素子9Aに供給する。さらに、マイクロコントローラ41は、第2振動素子9Bで発生した圧電信号をADCで検出する。
【0042】
ステップS19では、マイクロコントローラ41は、圧電信号の強度が駆動信号の周波数で駆動されたときの圧電信号の強度より大きければ、駆動信号の周波数を更新する。つまり、この場合はすでに駆動信号の共振周波数がずれていることが分かるので、より大きな信号強度をもたらす周波数を仮の共振周波数として選択する。ステップS19が終了すると、プロセスはステップS20に移行する。
【0043】
ステップS20では、マイクロコントローラ41は、前回の探索用駆動信号の強度が今回の探索用駆動信号の強度より大きいか否かを判断する。「Yes」の場合はプロセスはステップS21に移行し「No」の場合はプロセスはステップS22に移行する。
ステップS21では、マイクロコントローラ41は、前回から今回へとシフトされた探索用駆動信号の周波数シフト方向と反対側に、次回の探索用駆動信号の周波数を設定する。
【0044】
ステップS22では、マイクロコントローラ41は、前回から今回へとシフトされた探索用駆動信号の周波数シフト方向と同じ側に、次回の探索用駆動信号の周波数を設定する。
ステップS21又はステップS22が終了すれば、プロセスは終了する。
【0045】
(7)リアルタイム共振の第1実施例
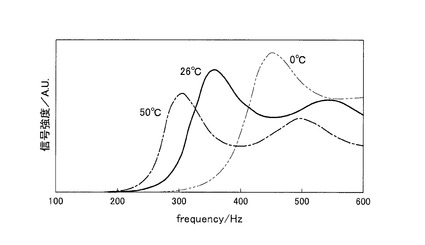
図11〜図13を用いて、リアルタイム共振を説明する。なお、以下の説明は動作の原理を説明するためのものであり、実際の動作より単純化されていることに注意されたい。図11は、一方の振動素子を駆動させて他方の振動素子の圧電信号を測定したときの周波数特性を示すグラフである。
【0046】
図11には、周辺温度によって周波数特性が大きく異なることが分かる。また、この場合、各スペクトルのピーク値が、各温度の共振周波数に対応していることが分かっている。つまり、上記の測定によるピーク値を把握することで、2つの振動素子を駆動させて例えばタッチパネルの中心の振動を測定した場合の共振周波数が分かる。
【0047】
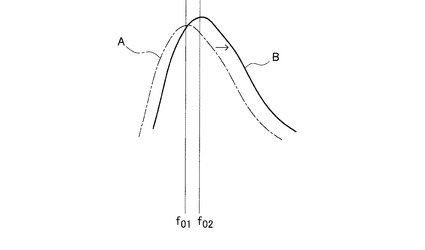
図12を用いて、リアルタイム共振検出の第1実施例を説明する。この実施例は、周波数特性がわずかに変化した場合の一実施例である。
図12に示すように、温度変化によって周波数特性Aが周波数特性Bに変化した場合を考える。この場合、共振周波数がf01(Hz)からf02(Hz)にシフトしている。
【0048】
例えば、図10に示すリアルタイム共振検出において1回目の場合は(ステップS15のYes)、第1振動素子9Aの共振周波数f01(Hz)近傍の高低いずれかにわずかにずれた周波数で駆動して、第2振動素子9Bから圧電振動を検出する(ステップS16)。
この周波数がf02(Hz)又はその近傍であれば、圧電信号の強度が共振周波数f01(Hz)の場合の強度より大きいので、駆動周波数をf02(Hz)又はその近傍に変更する(ステップS17)。
【0049】
この周波数がf01(Hz)に対してf02(Hz)と反対側であれば、圧電信号の強度が共振周波数f01(Hz)の場合の強度より小さいので、駆動周波数はf01(Hz)のまま維持される(ステップS17)。そして、次のリアルタイム検出時には、反対側つまりf02(Hz)側の探索用駆動周波数が用いられ、上記と同等の結果が得られる(ステップS19)。
【0050】
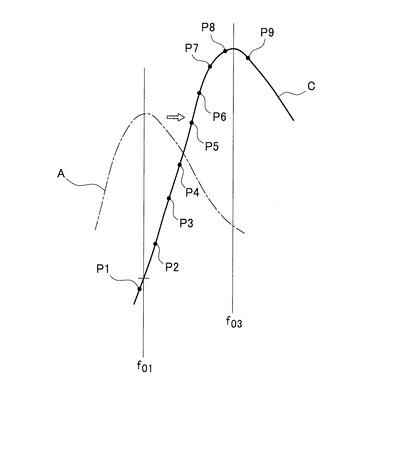
図13を用いて、リアルタイム共振の第2実施例を説明する。この実施例は、周波数特性が大きく変化した場合の一実施例である。
図13に示すように、温度変化によって周波数特性Aが周波数特性Cに変化した場合を考える。この場合、共振周波数がf01(Hz)からf03(Hz)にシフトしている。
【0051】
例えば、図10に示すリアルタイム共振検出において1回目の場合は(ステップS15のYes)、第1振動素子9Aの共振周波数f01(Hz)近傍のわずかにずれた周波数で駆動して、第2振動素子9Bから圧電振動を検出する(ステップS16)。
【0052】
この周波数がf01(Hz)に対してf03(Hz)と反対側のP1点に対応する周波数であれば、圧電信号の強度が共振周波数f01(Hz)の場合の強度より小さいので、駆動周波数はf01(Hz)のまま維持される(ステップS17)。そして、次のリアルタイム検出時には、反対側つまりf03(Hz)側の探索用駆動周波数が用いられる。図13の実施例では、ステップS20において連続して「No」となるので、探索用駆動信号はf03側に順番にP2点,P3点,P4点、P5点に対応する周波数に設定されていく(ステップS22)。
【0053】
そして、P6点に対応する探索用駆動信号では、圧電信号の強度がf01(Hz)の場合の強度より大きくなるので、駆動周波数は更新される。(ステップS17)。つまり、P6点に対応する周波数が新たな駆動周波数になる。
以後、P7点、P8点と駆動周波数は更新される。
【0054】
P9点では、今回の圧電信号の強度が前回の圧電信号の強度より小さくなるので(ステップS20のYes)、次はf03(Hz)の反対側に探索用駆動周波数が設定される(ステップS21)。したがって、周波数f03の両側で探索用駆動周波数の探索が続けられる。なお、探索の往復は無制限に行われてもよいし、複数回実行された後に打ち切られてもよい。また、探索の往復は回数が増えると探索の幅を小さくしてもよい。
【0055】
(8)実施形態の作用効果
上記実施形態は、下記のように表現可能である。
(A)タッチセンサ39(タッチセンサの一例)は、タッチパネル7(タッチパネルの一例)と、第1振動素子9A(第1振動素子の一例)及び第2振動素子9B(第2振動素子の一例)と、素子駆動部37(駆動制御部の一例)とを備えている。
第1振動素子9A及び第2振動素子9Bは、タッチパネル7に装着されている。
素子駆動部37は、タッチパネル7が操作されれば駆動信号を用いて第1振動素子9A及び第2振動素子9Bを振動させる。
素子駆動部37は、第1振動素子9Aを振動させつつ第2振動素子9Bからの検出信号を取得することで、第1振動素子9A及び第2振動素子9Bを振動させるための共振周波数を探索して、駆動信号の周波数を決定する。
この装置では、第1振動素子9Aと第2振動素子9Bを用いて第1振動素子9A及び第2振動素子9Bを振動させるための共振周波数が探索されて、その結果駆動信号の周波数が決定される。したがって、簡単な構成によって、振動素子の周波数特性の変化を補償することができる。つまり、タッチパネルにおける振動の強度均一化が実現される。
【0056】
(B)素子駆動部37は、スイープサイン信号を第1振動素子9Aに与えてもよい。
例えば、電子機器の電源投入時又はhaptics機能ON時に、スイープサイン信号を用いて共振周波数を検出して、その共振周波数を駆動信号の周波数に設定できる。
【0057】
(C)素子駆動部37は、タッチパネル7の第1単一駆動領域7a又は第2単一駆動領域7b(所定領域の一例)が操作されれば、第1振動素子9Aに探索用駆動信号を供給してもよい。
この装置では、タッチパネル7の操作のタイミングで探索用駆動信号が第1振動素子9Aに供給されるので、周波数特性の変化をきめ細かく補償できる。また、所定領域以外が操作されれば駆動信号が第1振動素子9A及び第2振動素子9Bに供給されるので、周波数特性の補償の場合と通常の場合とを使い分けることができる。
【0058】
(D)第1単一駆動領域7a又は第2単一駆動領域7bは、第1振動素子9Aが単独で所定以上の強度の振動を発生可能な領域であってもよい。
この装置では、第1振動素子9Aのみを振動させても十分な大きさの振動が得られる。
【0059】
(E)素子駆動部37は、検出信号の強度が駆動信号を用いた場合に得られるはずの検出信号の強度より大きければ、探索用駆動信号の周波数を新たな駆動信号の周波数に設定してもよい。
この装置では、駆動信号の強度より大きな検出信号を発生する探索用駆動信号が見つかれば駆動信号の周波数が更新されるので、駆動信号の周波数を共振周波数に近づけることができる。
【0060】
(F)素子駆動部37は、検出信号の強度が前回得られた検出信号の強度より大きければ次回の探索用駆動信号の周波数を設定する高低向きを前回と反対側にし、検出信号の強度が前回得られた検出信号の強度より小さければ次回の駆動信号の周波数を設定する高低向きを前回と同じ側にしてもよい。
この装置では、検出信号の強度が大きい側に探索用駆動信号を設定していくので、探索用駆動信号の周波数が共振周波数に徐々に近づくことができる。
【0061】
(G)タブレット型コンピュータ1(電子機器の一例)は、上記のタッチセンサを有する。
タブレット型コンピュータ1は、上述の作用効果を得ることができる。
【0062】
(9)他の実施形態
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、発明の要旨を逸脱しない範囲で種々の変更が可能である。特に、本明細書に書かれた複数の実施形態及び変形例は必要に応じて任意に組み合わせ可能である。
(a)前記実施形態ではタッチパネル装置としてタブレット型コンピュータを採用したが、本発明は他のコンピュータにも適用できる。
(b)前記実施形態では振動素子は2個であったが、3個以上であってもよい。その場合、振動させられる素子の数と、振動を検出する素子の数の組み合わせは任意である。
(c)前記実施形態ではバイモルフ型圧電素子が用いられたが、振動素子の種類は前記実施形態のものに限定されない。また、振動素子の形状、取り付け位置、取り付け手段も前記実施形態に限定されない。
(d)図10のステップS21及びステップS22において設定される探索用駆動周波数の設定幅は一定であってもよいし、変化させてもよい。
【産業上の利用可能性】
【0063】
本発明は、操作者に操作感をフィードバック可能なタッチセンサ及び電子機器に広く適用できる。
【符号の説明】
【0064】
1 タブレット型コンピュータ
3 ケース
5 ディスプレイ
7 タッチパネル
7a 第1単一駆動領域
7b 第2単一駆動領域
9A 第1振動素子
9B 第2振動素子
11 第1金属板
13 ピエゾ素子
17 樹脂成型物
19 第2金属板
21 両面テープ
25 フォースセンサ
31 制御部
33 入力位置判定部
35 表示制御部
37 素子駆動部
39 タッチセンサ
41 マイクロコントローラ
43 第1アンプ
45 第2アンプ
47 チャージアンプ
49 スイッチ
【技術分野】
【0001】
本発明は、タッチセンサ及び電子機器、特に、操作者に操作感をフィードバック可能なタッチセンサ及び電子機器に関する。
【背景技術】
【0002】
タッチパネル上に液晶画面によってスイッチなどの操作部を表示して、ユーザの指での操作を可能としたユーザインタフェースが多くの分野で利用されている。
【0003】
また、ユーザに対して、タッチパネルを操作した時に実際の物理的なスイッチを動かしたような操作感を与えるために、振動又は音を発生させるインタフェースが考案されている。例えばタッチパネルの周囲に圧電アクチュエータを装着して、ユーザがタッチパネル上の操作ボタンを押した場合に振動又は音を発生させることで、実際の物理的なボタンの操作と同様の操作感を提供する(例えば、特許文献1を参照。)。
圧電アクチュエータは、チタン酸バリウム等のセラミックスからなる。セラミックスに圧力を加えると電圧が発生し、その反対に、セラミックスに電圧を印加するとセラミックスが変形を起こす。このような圧電効果を用いることで、圧電アクチュエータに振動を発生させている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2011−30290号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
振動素子の製造誤差又は取付誤差によって、タッチパネル装置における周波数特性にバラツキが生じることがある。また、使用温度によっても、振動素子の周波数特性が変化する。つまり、従来のタッチパネル装置では共振周波数がずれやすく、同じ強さの操作感をフィードバックすることが困難であった。
【0006】
本発明の課題は、簡単な構成で、タッチパネルに装着された振動素子の周波数特性の変化を補償することで、発生する操作感を均一にすることにある。
【課題を解決するための手段】
【0007】
以下に、課題を解決するための手段として複数の態様を説明する。これら態様は、必要に応じて任意に組み合せることができる。
【0008】
本発明の一見地に係るタッチセンサは、タッチパネルと、第1振動素子及び第2振動素子と、駆動制御部とを備えている。
第1振動素子及び第2振動素子は、タッチパネルに装着されている。
駆動制御部は、タッチパネルが操作されれば、駆動信号を用いて第1振動素子及び第2振動素子を振動させる。
駆動制御部は、第1振動素子を振動させつつ、第2振動素子からの検出信号を取得することで、第1振動素子及び第2振動素子を振動させるための共振周波数を探索して、駆動信号の周波数を決定する。
この装置では、第1振動素子と第2振動素子を用いて第1振動素子及び第2振動素子を振動させるための共振周波数が探索されて、その結果、駆動信号の周波数が決定される。したがって、簡単な構成によって、振動素子の周波数特性の変化を補償できる。
【0009】
駆動制御部は、第1振動素子及び第2振動素子を振動させるための共振周波数を探索して駆動信号の周波数を決定するために、スイープサイン信号を第1振動素子に与えてもよい。
例えば、電子機器の電源投入時又はhaptics機能ON時に、スイープサイン信号を用いて共振周波数を検出して、その共振周波数を駆動信号の周波数に設定できる。
【0010】
駆動制御部は、タッチパネルの所定領域が操作されれば、第1振動素子に探索用駆動信号を供給してもよい。
この装置では、タッチパネルの操作のタイミングで探索用駆動信号が第1振動素子に供給されるので、周波数特性の変化をきめ細かく補償できる。また、所定領域以外が操作されれば駆動信号が第1振動素子及び第2振動素子に供給されるので、周波数特性の補償の場合と通常の場合とを使い分けることができる。
【0011】
所定領域は、第1振動素子が単独で所定以上の強度の振動を発生可能な領域であってもよい。
この装置では、第1振動素子のみを振動させても、十分な大きさの振動が得られる。
【0012】
駆動制御部は、検出信号の強度が駆動信号を用いた場合に得られるはずの検出信号の強度より大きければ、探索用駆動信号の周波数を新たな駆動信号の周波数に設定してもよい。
この装置では、駆動信号の強度より大きな検出信号を発生する探索用駆動信号が見つかれば駆動信号の周波数が更新されるので、駆動信号の周波数を共振周波数に近づけることができる。
【0013】
駆動制御部は、検出信号の強度が前回得られた検出信号の強度より大きければ次回の探索用駆動信号の周波数を設定する高低向きを前回と反対側にし、検出信号の強度が前回得られた検出信号の強度より小さければ次回の駆動信号の周波数を設定する高低向きを前回と同じ側にしてもよい。
この装置では、検出信号の強度が大きい側に探索用駆動信号を設定していくので、探索用駆動信号の周波数が共振周波数に徐々に近づく。
【0014】
本発明の他の見地に係る電子機器は、上記のタッチセンサを有する。
電子機器は、上述の作用効果を得ることができる。
【発明の効果】
【0015】
本発明に係るタッチセンサ及び電子機器では、簡単な構成で、タッチパネルに装着された振動素子の周波数特性の変化を補償でき、その結果、発生する操作感を均一にできる。
【図面の簡単な説明】
【0016】
【図1】タブレット型コンピュータの平面図、A−A断面図、及びB−B断面図。
【図2】図1の部分拡大図。
【図3】タブレット型コンピュータの制御構成を示すブロック図
【図4】素子駆動部のハードウェア構成を示すブロック図
【図5】単一駆動領域を示すタッチパネル装置の概略平面図
【図6】haptics強度の測定方法を説明するための概略模式図
【図7】haptics機能がONになっているときの制御動作を示すフローチャート。
【図8】クリック波形を示すグラフ。
【図9】スイープサイン信号による共振検出制御のフローチャート。
【図10】リアルタイム共振検出制御動作を示すフローチャート。
【図11】一方の振動素子を駆動させて他方の振動素子の圧電信号を測定したときの周波数特性を示すグラフ。
【図12】リアルタイム共振検出の第1実施例のグラフ。
【図13】リアルタイム共振検出の第2実施例のグラフ。
【発明を実施するための形態】
【0017】
(1)タブレット型コンピュータ
図1を用いて、本発明の一実施形態としてのタブレット型コンピュータ1(電子機器の一例)を説明する。図1は、タブレット型コンピュータの平面図、A−A断面図、及びB−B断面図である。図2は、図1の部分拡大図である。
【0018】
タブレット型コンピュータ1は、主に、ケース3と、ディスプレイ5と、タッチパネル7とを有している。ケース3は例えばプラスチック製の箱形部材である。ディスプレイ5は、例えば、液晶ディスプレイであり、ケース3内に配置されている。タッチパネル7は、例えば、静電容量方式のタッチパネルであり、ケース3に装着されている。
【0019】
図3に示すように、タブレット型コンピュータ1は、制御部31を有している。制御部31は、タッチパネル7に信号が入力されると、それに基づいて情報処理を行い、さらにディスプレイ5に各種表示を行わせる。制御部31は、CPU、RAM、ROM等からなりプログラムを実行するコンピュータである。
【0020】
(2)振動素子
タブレット型コンピュータ1は、さらに、第1振動素子9A及び第2振動素子9Bを有している。第1振動素子9A及び第2振動素子9Bは、圧電効果を実現するための部材である。第1振動素子9A及び第2振動素子9Bは、タッチパネル7の裏面に装着されている。第1振動素子9A及び第2振動素子9Bは、タッチパネル7の両端に離れて装着されている。
【0021】
図2を用いて、第1振動素子9Aの構造を詳細に説明する。第1振動素子9Aは、DMA(Distributed Mode Actuator)であり、2枚の圧電素子を貼り合わせた構造であり、2枚の圧電素子のそれぞれに差動的な電圧を加えると伸縮方向が反対になるため反りが生ずる現象を利用している。第1振動素子9Aは、主に、第1金属板11と、ピエゾ素子13,15とを有している。ピエゾ素子13,15は、第1金属板11の両面に貼りつけられている。これら部材は、一方向に長く延びる短冊状の部材である。第1振動素子9Aは、さらに、樹脂成型物17と、第2金属板19とを有している。樹脂成型物17はブロック状の部材であり、第1金属板11の一端が固定されている。また、樹脂成型物17は、第2金属板19の一端側の平面に固定されている。第2金属板19は、第1金属板11と同様に一方向に長く延びる短冊状の部材である。第2金属板19は、両面テープ21によって、タッチパネル7の裏面に固定されている。
【0022】
以上のようにして、第1金属板11及びピエゾ素子13,15からなる振動体が片持ち状態でタッチパネル7の裏面に固定されている。電圧が加えられるとピエゾ素子13,15は画面内方向に延伸することで、第1金属板11に撓み振動が発生する。この振動は、樹脂成型物17及び第2金属板19を介して、タッチパネル7に伝達される。
なお、第2振動素子9Bの構造は第1振動素子9Aの構造と同じであるので、ここでは説明を省略する。
【0023】
(3)制御部
図3を用いて、制御部31の構成を説明する。図3は、タブレット型コンピュータの制御構成を示すブロック図である。図に示すように、制御部31は、入力位置判定部33と、表示制御部35と、素子駆動部37とを有する。これら機能は、ソフトウェア及びハードウェアで実現される。入力位置判定部33は、タッチパネル7に人間の指が触れると、タッチパネル7からの検出信号に基づいて指が触れた位置を判定する。この判定情報を用いて、制御部31はタブレット型コンピュータ1としての機能を実行する。表示制御部35は、ディスプレイ5に各種情報を表示する。素子駆動部37は、第1振動素子9A及び第2振動素子9Bに駆動信号を送信して、それらを振動させる。また、素子駆動部37は、後述するように、第2振動素子9Bで検出された検出信号を受信する機能を有している。
上述のタッチパネル7と、第1振動素子9A及び第2振動素子9Bと、素子駆動部37とによって、タッチセンサ39が構成されている。
【0024】
図4を用いて、素子駆動部37を詳細に説明する。図4は、素子駆動部のハードウェア構成を示すブロック図である。素子駆動部37は、マイクロコントローラ41を有している。マイクロコントローラ41は、第1振動素子9A及び第2振動素子9Bにhaptics信号を送信することができ、さらに第2振動素子9Bから検出信号を受信可能である。より具体的には、マイクロコントローラ41は、第1振動素子9A及び第2振動素子9Bにhaptics信号を送信する一対のDAコンバータ(DAC)と、第2振動素子9Bから検出信号を受信可能なADコンバータ(ADC)とを有している。
素子駆動部37は、さらに、第1アンプ43、第2アンプ45、チャージアンプ47と、スイッチ49とを有している。第1アンプ43は、第1振動素子9Aに接続されている。第2アンプ45及びチャージアンプ47は、第2振動素子9Bに対してスイッチ49を介して接続されている。スイッチ49は、第2振動素子9Bの接続先を、第2アンプ45とチャージアンプ47との間で切り替えることができる。
【0025】
第2アンプ45と第2振動素子9Bが接続されている状態では、マイクロコントローラ41からhaptics信号が第1振動素子9A及び第2振動素子9Bに供給可能である。チャージアンプ47と第2振動素子9Bが接続されている状態では、マイクロコントローラ41からhaptics信号が第1振動素子9Aにのみ供給され、第2振動素子9Bが振動を電圧に変換することで検出信号を得て、その検出信号がマイクロコントローラ41に供給されることが可能である。
【0026】
図5を用いて、タッチパネル7における単一駆動領域7a、7bを説明する。図5は、単一駆動領域を示すタッチパネル装置の概略平面図である。
単一駆動領域7a、7bは、第1振動素子9Aのみを振動させたときに操作者の指に対して十分な大きさの触感を与える振動を発生できる領域である。言い換えると、単一駆動領域7a、7b以外の領域は、十分な大きさの触感を与えるためには第1振動素子9A及び第2振動素子9Bの両方を振動させることが必要又は望ましいことになる。
【0027】
図5に示すタッチパネル7上の数字は、第1振動素子9Aのみを共振周波数で振動させたときのタッチパネル面内のhaptics強度のバラツキの一例を示している(単位はmN)。このバラツキは、タッチパネルの厚み、材質、タッチパネルとケースの間の空気による空気バネ、ケースに対するタッチパネルの固定状態によって決まる。したがって、図5に示す単一駆動領域の設定は各機種で異なることがある。なお、発明者からの経験から40mN程度であれば指に十分に強い触感を与えることができるので、それらの領域を単一駆動領域としている。
図6を用いて、haptics強度の測定方法を説明する。図6は、haptics強度の測定方法を説明するための概略模式図である。図に示すように、フォースセンサ25をタッチパネル7の表面に押し当てて振動を検出し、その強度をhaptics強度とする。haptics強度は制御部31に取り込まれ、制御部31が単一駆動領域7a、7bを決定する。
【0028】
(4)haptics機能
図7を用いて、タブレット型コンピュータ1のhaptics制御動作を説明する。図7は、haptics機能がONになっているときの制御動作を示すフローチャートである。
【0029】
電源投入又はhaptics機能ON操作によって、haptics機能がON状態になれば、図7の制御動作が開始される。
ステップS1では、スイープサイン信号による共振検出が実行される(後述)。つまり、電源投入又はhaptics機能ON操作時に、スイープサイン信号による共振検出が実行される
【0030】
ステップS2では、マイクロコントローラ41は、haptics機能がOFFになっているか否かを判断する。「Yes」であればプロセスは終了し、「No」であればプロセスをステップS3に移行する。
ステップS3では、マイクロコントローラ41は、入力位置判定部33からの判定結果に基づいて、入力が検出された否かを判断する。「Yes」であればプロセスはステップS4に移行し、「No」であればプロセスはステップS2に戻って、次の入力を待つ。
【0031】
ステップS4では、マイクロコントローラ41は、入力位置判定部33からの位置座標に基づいて、入力位置が単一駆動領域7a、7bであるか否かを判断する。「Yes」であればプロセスはステップS5に移行し、「No」であればプロセスはステップS6に移行する。
ステップS5では、リアルタイム共振検出が実行される。つまり、haptics機能ON時に単一駆動領域に入力がされれば、リアルタイム共振検出が実行される(後述)。
【0032】
ステップS6では、マイクロコントローラ41は、スイッチ49によって第2振動素子9Bを第2アンプ45に接続した状態とした上で、第1振動素子9A及び第2振動素子9Bに駆動信号での周波数のサイン波で駆動させる。その結果、振動によるクリックが発生する。
なお、クリック波形としては、図8に示すように、図8上側の駆動周波数にエンベロープをかけて得られた図8下側のものが用いられる。
【0033】
ステップS5及びステップS6が終了すると、プロセスはステップS2に戻って次の入力を待つ。
【0034】
(5)スイープサイン信号による共振検出(図7のステップS1)
図9を用いて、スイープサイン信号による共振検出制御を説明する。図9は、スイープサイン信号による共振検出制御のフローチャートである。
【0035】
ステップS11では、マイクロコントローラ41は、スイッチ49を操作して第2振動素子9Bをチャージアンプ47に接続しておき、その状態でスイープサイン信号を第1振動素子9Aに供給する。スイープサイン信号は、周波数を連続的に変化させたサイン波である。さらに、マイクロコントローラ41は、第2振動素子9Bで発生した圧電信号を、検出する。
【0036】
ステップS12では、マイクロコントローラ41は、圧電信号をFFT解析して、各周波数の信号強度を算出する。つまり、圧電信号の周波数応答から共振周波数が検出される。
ステップS13では、マイクロコントローラ41は、共振周波数を駆動周波数に設定する。
【0037】
なお、スイープサイン信号の代わりに、様々な周波数が一定の割合で含まれたノイズ信号が用いられてもよい。ただし、上記の駆動信号の周波数の設定は、タッチパネルの操作中には行われないことが好ましい。スイープサイン信号又はノイズ信号で生じる振動又は音が、タッチパネル操作の邪魔となるからである。
【0038】
(6)リアルタイム共振検出
図10を用いて、リアルタイム共振検出を説明する。図10は、リアルタイム共振検出制御動作を示すフローチャートである。
ステップS15では、マイクロコントローラ41は、駆動信号が図8のステップS1で設定された後での第1回目のリアルタイム共振検出であるか否かを判断する。「Yes」であればプロセスはステップS16に移行し、「No」であればプロセスはステップS18に移行する。
【0039】
ステップS16では、マイクロコントローラ41は、スイッチ49を操作して第2振動素子9Bをチャージアンプ47に接続しておき、その状態で駆動信号の周波数の高い側又は低い側にわずかにずれた周波数の信号を第1振動素子9Aに供給する。さらに、マイクロコントローラ41は、第2振動素子9Bで発生した圧電信号をADCで検出する。
【0040】
ステップS17では、マイクロコントローラ41は、圧電信号の強度が駆動信号の周波数で駆動されたときの圧電信号の強度より大きければ、駆動信号の周波数を更新する。つまり、この場合はすでに駆動信号の共振周波数がずれていることが分かるので、より大きな信号強度をもたらす周波数を仮の共振周波数として選択する。ステップS17が終了すると、プロセスは終了する。
【0041】
ステップS18では、マイクロコントローラ41は、スイッチ49を操作して第2振動素子9Bをチャージアンプ47に接続しておき、先の探索用駆動周波数から更新されて得られた探索用駆動周波数の探索用駆動信号を第1振動素子9Aに供給する。さらに、マイクロコントローラ41は、第2振動素子9Bで発生した圧電信号をADCで検出する。
【0042】
ステップS19では、マイクロコントローラ41は、圧電信号の強度が駆動信号の周波数で駆動されたときの圧電信号の強度より大きければ、駆動信号の周波数を更新する。つまり、この場合はすでに駆動信号の共振周波数がずれていることが分かるので、より大きな信号強度をもたらす周波数を仮の共振周波数として選択する。ステップS19が終了すると、プロセスはステップS20に移行する。
【0043】
ステップS20では、マイクロコントローラ41は、前回の探索用駆動信号の強度が今回の探索用駆動信号の強度より大きいか否かを判断する。「Yes」の場合はプロセスはステップS21に移行し「No」の場合はプロセスはステップS22に移行する。
ステップS21では、マイクロコントローラ41は、前回から今回へとシフトされた探索用駆動信号の周波数シフト方向と反対側に、次回の探索用駆動信号の周波数を設定する。
【0044】
ステップS22では、マイクロコントローラ41は、前回から今回へとシフトされた探索用駆動信号の周波数シフト方向と同じ側に、次回の探索用駆動信号の周波数を設定する。
ステップS21又はステップS22が終了すれば、プロセスは終了する。
【0045】
(7)リアルタイム共振の第1実施例
図11〜図13を用いて、リアルタイム共振を説明する。なお、以下の説明は動作の原理を説明するためのものであり、実際の動作より単純化されていることに注意されたい。図11は、一方の振動素子を駆動させて他方の振動素子の圧電信号を測定したときの周波数特性を示すグラフである。
【0046】
図11には、周辺温度によって周波数特性が大きく異なることが分かる。また、この場合、各スペクトルのピーク値が、各温度の共振周波数に対応していることが分かっている。つまり、上記の測定によるピーク値を把握することで、2つの振動素子を駆動させて例えばタッチパネルの中心の振動を測定した場合の共振周波数が分かる。
【0047】
図12を用いて、リアルタイム共振検出の第1実施例を説明する。この実施例は、周波数特性がわずかに変化した場合の一実施例である。
図12に示すように、温度変化によって周波数特性Aが周波数特性Bに変化した場合を考える。この場合、共振周波数がf01(Hz)からf02(Hz)にシフトしている。
【0048】
例えば、図10に示すリアルタイム共振検出において1回目の場合は(ステップS15のYes)、第1振動素子9Aの共振周波数f01(Hz)近傍の高低いずれかにわずかにずれた周波数で駆動して、第2振動素子9Bから圧電振動を検出する(ステップS16)。
この周波数がf02(Hz)又はその近傍であれば、圧電信号の強度が共振周波数f01(Hz)の場合の強度より大きいので、駆動周波数をf02(Hz)又はその近傍に変更する(ステップS17)。
【0049】
この周波数がf01(Hz)に対してf02(Hz)と反対側であれば、圧電信号の強度が共振周波数f01(Hz)の場合の強度より小さいので、駆動周波数はf01(Hz)のまま維持される(ステップS17)。そして、次のリアルタイム検出時には、反対側つまりf02(Hz)側の探索用駆動周波数が用いられ、上記と同等の結果が得られる(ステップS19)。
【0050】
図13を用いて、リアルタイム共振の第2実施例を説明する。この実施例は、周波数特性が大きく変化した場合の一実施例である。
図13に示すように、温度変化によって周波数特性Aが周波数特性Cに変化した場合を考える。この場合、共振周波数がf01(Hz)からf03(Hz)にシフトしている。
【0051】
例えば、図10に示すリアルタイム共振検出において1回目の場合は(ステップS15のYes)、第1振動素子9Aの共振周波数f01(Hz)近傍のわずかにずれた周波数で駆動して、第2振動素子9Bから圧電振動を検出する(ステップS16)。
【0052】
この周波数がf01(Hz)に対してf03(Hz)と反対側のP1点に対応する周波数であれば、圧電信号の強度が共振周波数f01(Hz)の場合の強度より小さいので、駆動周波数はf01(Hz)のまま維持される(ステップS17)。そして、次のリアルタイム検出時には、反対側つまりf03(Hz)側の探索用駆動周波数が用いられる。図13の実施例では、ステップS20において連続して「No」となるので、探索用駆動信号はf03側に順番にP2点,P3点,P4点、P5点に対応する周波数に設定されていく(ステップS22)。
【0053】
そして、P6点に対応する探索用駆動信号では、圧電信号の強度がf01(Hz)の場合の強度より大きくなるので、駆動周波数は更新される。(ステップS17)。つまり、P6点に対応する周波数が新たな駆動周波数になる。
以後、P7点、P8点と駆動周波数は更新される。
【0054】
P9点では、今回の圧電信号の強度が前回の圧電信号の強度より小さくなるので(ステップS20のYes)、次はf03(Hz)の反対側に探索用駆動周波数が設定される(ステップS21)。したがって、周波数f03の両側で探索用駆動周波数の探索が続けられる。なお、探索の往復は無制限に行われてもよいし、複数回実行された後に打ち切られてもよい。また、探索の往復は回数が増えると探索の幅を小さくしてもよい。
【0055】
(8)実施形態の作用効果
上記実施形態は、下記のように表現可能である。
(A)タッチセンサ39(タッチセンサの一例)は、タッチパネル7(タッチパネルの一例)と、第1振動素子9A(第1振動素子の一例)及び第2振動素子9B(第2振動素子の一例)と、素子駆動部37(駆動制御部の一例)とを備えている。
第1振動素子9A及び第2振動素子9Bは、タッチパネル7に装着されている。
素子駆動部37は、タッチパネル7が操作されれば駆動信号を用いて第1振動素子9A及び第2振動素子9Bを振動させる。
素子駆動部37は、第1振動素子9Aを振動させつつ第2振動素子9Bからの検出信号を取得することで、第1振動素子9A及び第2振動素子9Bを振動させるための共振周波数を探索して、駆動信号の周波数を決定する。
この装置では、第1振動素子9Aと第2振動素子9Bを用いて第1振動素子9A及び第2振動素子9Bを振動させるための共振周波数が探索されて、その結果駆動信号の周波数が決定される。したがって、簡単な構成によって、振動素子の周波数特性の変化を補償することができる。つまり、タッチパネルにおける振動の強度均一化が実現される。
【0056】
(B)素子駆動部37は、スイープサイン信号を第1振動素子9Aに与えてもよい。
例えば、電子機器の電源投入時又はhaptics機能ON時に、スイープサイン信号を用いて共振周波数を検出して、その共振周波数を駆動信号の周波数に設定できる。
【0057】
(C)素子駆動部37は、タッチパネル7の第1単一駆動領域7a又は第2単一駆動領域7b(所定領域の一例)が操作されれば、第1振動素子9Aに探索用駆動信号を供給してもよい。
この装置では、タッチパネル7の操作のタイミングで探索用駆動信号が第1振動素子9Aに供給されるので、周波数特性の変化をきめ細かく補償できる。また、所定領域以外が操作されれば駆動信号が第1振動素子9A及び第2振動素子9Bに供給されるので、周波数特性の補償の場合と通常の場合とを使い分けることができる。
【0058】
(D)第1単一駆動領域7a又は第2単一駆動領域7bは、第1振動素子9Aが単独で所定以上の強度の振動を発生可能な領域であってもよい。
この装置では、第1振動素子9Aのみを振動させても十分な大きさの振動が得られる。
【0059】
(E)素子駆動部37は、検出信号の強度が駆動信号を用いた場合に得られるはずの検出信号の強度より大きければ、探索用駆動信号の周波数を新たな駆動信号の周波数に設定してもよい。
この装置では、駆動信号の強度より大きな検出信号を発生する探索用駆動信号が見つかれば駆動信号の周波数が更新されるので、駆動信号の周波数を共振周波数に近づけることができる。
【0060】
(F)素子駆動部37は、検出信号の強度が前回得られた検出信号の強度より大きければ次回の探索用駆動信号の周波数を設定する高低向きを前回と反対側にし、検出信号の強度が前回得られた検出信号の強度より小さければ次回の駆動信号の周波数を設定する高低向きを前回と同じ側にしてもよい。
この装置では、検出信号の強度が大きい側に探索用駆動信号を設定していくので、探索用駆動信号の周波数が共振周波数に徐々に近づくことができる。
【0061】
(G)タブレット型コンピュータ1(電子機器の一例)は、上記のタッチセンサを有する。
タブレット型コンピュータ1は、上述の作用効果を得ることができる。
【0062】
(9)他の実施形態
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、発明の要旨を逸脱しない範囲で種々の変更が可能である。特に、本明細書に書かれた複数の実施形態及び変形例は必要に応じて任意に組み合わせ可能である。
(a)前記実施形態ではタッチパネル装置としてタブレット型コンピュータを採用したが、本発明は他のコンピュータにも適用できる。
(b)前記実施形態では振動素子は2個であったが、3個以上であってもよい。その場合、振動させられる素子の数と、振動を検出する素子の数の組み合わせは任意である。
(c)前記実施形態ではバイモルフ型圧電素子が用いられたが、振動素子の種類は前記実施形態のものに限定されない。また、振動素子の形状、取り付け位置、取り付け手段も前記実施形態に限定されない。
(d)図10のステップS21及びステップS22において設定される探索用駆動周波数の設定幅は一定であってもよいし、変化させてもよい。
【産業上の利用可能性】
【0063】
本発明は、操作者に操作感をフィードバック可能なタッチセンサ及び電子機器に広く適用できる。
【符号の説明】
【0064】
1 タブレット型コンピュータ
3 ケース
5 ディスプレイ
7 タッチパネル
7a 第1単一駆動領域
7b 第2単一駆動領域
9A 第1振動素子
9B 第2振動素子
11 第1金属板
13 ピエゾ素子
17 樹脂成型物
19 第2金属板
21 両面テープ
25 フォースセンサ
31 制御部
33 入力位置判定部
35 表示制御部
37 素子駆動部
39 タッチセンサ
41 マイクロコントローラ
43 第1アンプ
45 第2アンプ
47 チャージアンプ
49 スイッチ
【特許請求の範囲】
【請求項1】
タッチパネルと、
前記タッチパネルに装着された第1振動素子及び第2振動素子と、
前記タッチパネルが操作されれば、駆動信号を用いて前記第1振動素子及び前記第2振動素子を振動させる駆動制御部と、を備え、
前記駆動制御部は、前記第1振動素子を振動させつつ前記第1振動素子からの検出信号を取得することで、前記第1振動素子及び前記第2振動素子を振動させるための共振周波数を探索して、前記駆動信号の周波数を決定する、
タッチセンサ。
【請求項2】
前記駆動制御部は、前記第1振動素子及び前記第2振動素子を振動させるための共振周波数を探索して、前記駆動信号の周波数を決定するために、スイープサイン信号を前記第1振動素子に与える、請求項1に記載のタッチセンサ。
【請求項3】
前記駆動制御部は、前記タッチパネルの所定領域が操作されれば、前記第1振動素子に探索用駆動信号を供給する、請求項1又は2に記載のタッチセンサ。
【請求項4】
前記所定領域は、前記第1振動素子が単独で所定以上の強度の振動を発生可能な領域である、請求項3に記載のタッチセンサ。
【請求項5】
前記駆動制御部は、前記検出信号の強度が駆動周波数を用いた場合に得られるはずの検出信号の強度より大きければ、前記探索用駆動信号の周波数を新たな駆動信号の周波数に設定する、請求項3又は4に記載のタッチセンサ。
【請求項6】
前記駆動制御部は、前記検出信号の強度が前回得られた検出信号の強度より大きければ次回の探索用駆動信号の駆動周波数を設定する高低向きを前回と反対側にし、前記検出信号の強度が前回得られた検出信号の強度より小さければ次回の探索用駆動信号の駆動周波数を設定する高低向きを前回と同じ側にする、請求項3〜5のいずれかに記載のタッチセンサ。
【請求項7】
請求項1〜6のいずれかに記載のタッチセンサを有する、電子機器。
【請求項1】
タッチパネルと、
前記タッチパネルに装着された第1振動素子及び第2振動素子と、
前記タッチパネルが操作されれば、駆動信号を用いて前記第1振動素子及び前記第2振動素子を振動させる駆動制御部と、を備え、
前記駆動制御部は、前記第1振動素子を振動させつつ前記第1振動素子からの検出信号を取得することで、前記第1振動素子及び前記第2振動素子を振動させるための共振周波数を探索して、前記駆動信号の周波数を決定する、
タッチセンサ。
【請求項2】
前記駆動制御部は、前記第1振動素子及び前記第2振動素子を振動させるための共振周波数を探索して、前記駆動信号の周波数を決定するために、スイープサイン信号を前記第1振動素子に与える、請求項1に記載のタッチセンサ。
【請求項3】
前記駆動制御部は、前記タッチパネルの所定領域が操作されれば、前記第1振動素子に探索用駆動信号を供給する、請求項1又は2に記載のタッチセンサ。
【請求項4】
前記所定領域は、前記第1振動素子が単独で所定以上の強度の振動を発生可能な領域である、請求項3に記載のタッチセンサ。
【請求項5】
前記駆動制御部は、前記検出信号の強度が駆動周波数を用いた場合に得られるはずの検出信号の強度より大きければ、前記探索用駆動信号の周波数を新たな駆動信号の周波数に設定する、請求項3又は4に記載のタッチセンサ。
【請求項6】
前記駆動制御部は、前記検出信号の強度が前回得られた検出信号の強度より大きければ次回の探索用駆動信号の駆動周波数を設定する高低向きを前回と反対側にし、前記検出信号の強度が前回得られた検出信号の強度より小さければ次回の探索用駆動信号の駆動周波数を設定する高低向きを前回と同じ側にする、請求項3〜5のいずれかに記載のタッチセンサ。
【請求項7】
請求項1〜6のいずれかに記載のタッチセンサを有する、電子機器。
【図1】


【図2】

【図3】

【図4】

【図5】
【図6】
【図7】

【図8】

【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−109429(P2013−109429A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−252127(P2011−252127)
【出願日】平成23年11月18日(2011.11.18)
【出願人】(000231361)日本写真印刷株式会社 (477)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月18日(2011.11.18)
【出願人】(000231361)日本写真印刷株式会社 (477)
【Fターム(参考)】
[ Back to top ]