
ノイズ検知装置、再生装置、およびノイズ検知プログラム

【課題】 動画像において、不適切なフィールドの混入によるノイズを、的確に自動で検知すること。
【解決手段】 複数のフレームからなる動画像を検知対象として、任意のフレームを構成するトップフィールドおよびボトムフィールドの少なくとも一方に、不適切なフィールドが混入しているか否かを検知するノイズ検知装置であって、処理の対象となる動画像を取得する取得部と、動画像のうち、任意のフレームのトップフィールドと、任意のフレームと連続する少なくとも1つのフレームのトップフィールドとの間の相関を第1の相関として検出するとともに、任意のフレームのボトムフィールドと、任意のフレームと連続する少なくとも1つのフレームのボトムフィールドとの間の相関を第2の相関として検出する検出部と、検出部による検出結果に基づいて第1の相関と第2の相関とを比較し、比較結果に基づいて、任意のフレームに不適切なフィールドが混入しているか否かの判定を行う判定部とを備える。
【解決手段】 複数のフレームからなる動画像を検知対象として、任意のフレームを構成するトップフィールドおよびボトムフィールドの少なくとも一方に、不適切なフィールドが混入しているか否かを検知するノイズ検知装置であって、処理の対象となる動画像を取得する取得部と、動画像のうち、任意のフレームのトップフィールドと、任意のフレームと連続する少なくとも1つのフレームのトップフィールドとの間の相関を第1の相関として検出するとともに、任意のフレームのボトムフィールドと、任意のフレームと連続する少なくとも1つのフレームのボトムフィールドとの間の相関を第2の相関として検出する検出部と、検出部による検出結果に基づいて第1の相関と第2の相関とを比較し、比較結果に基づいて、任意のフレームに不適切なフィールドが混入しているか否かの判定を行う判定部とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ノイズ検知装置、再生装置、およびノイズ検知プログラムに関する。
【背景技術】
【0002】
画像においては、様々なノイズが発生することが知られている。例えば、動画像において、あるフレームのトップフィールドとボトムフィールドとの一方、あるいは、両方に不適切なフィールドが混入する現象が知られている。このようなノイズは、カット代わりの部分で意図しないフレームやフィールドが混入してしまうものであり、要因としては、動画像の編集する際の操作ミスや、動画像を複数の機材間で複製する際の機械的な要因、ソフトウェア上の要因などが考えられる。何れの場合であっても、このようなノイズは、目視により検知せざるを得ず、検知に時間や手間を要するという問題がある。また、上述したノイズは瞬間的に(例えば数フレームのみ)発生する場合が多く、慎重に確認を行わないと見逃しが発生する場合もある。
【0003】
そこで、このようなノイズの検知を自動化することが考えられている。例えば、特許文献1の発明では、映像信号自身より映像情報成分の異常を自動的に検知する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平9−46733号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、特許文献1の発明は、映像のフリーズ状態およびシーンチェンジを検出するものに過ぎず、上述した不適切なフィールドの混入によるノイズの検知のような細かい検出を行うことはできない。
【0006】
本発明の目的は、動画像において、不適切なフィールドの混入によるノイズを、的確に自動で検知するための手段を提供することにある。
【課題を解決するための手段】
【0007】
一の態様のノイズ検知装置は、複数のフレームからなる動画像を検知対象として、任意のフレームを構成するトップフィールドおよびボトムフィールドの少なくとも一方に、不適切なフィールドが混入しているか否かを検知するノイズ検知装置であって、処理の対象となる前記動画像を取得する取得部と、前記動画像のうち、任意のフレームの前記トップフィールドと、前記任意のフレームと連続する少なくとも1つのフレームの前記トップフィールドとの間の相関を第1の相関として検出するとともに、前記任意のフレームの前記ボトムフィールドと、前記任意のフレームと連続する少なくとも1つのフレームの前記ボトムフィールドとの間の相関を第2の相関として検出する検出部と、前記検出部による検出結果に基づいて前記第1の相関と前記第2の相関とを比較し、比較結果に基づいて、前記任意のフレームに前記不適切なフィールドが混入しているか否かの判定を行う判定部とを備える。
【0008】
なお、前記任意のフレームを第nフレームとすると、前記検出部は、前記第nフレームと第(n−1)フレームとの間の前記第1の相関および前記第2の相関と、前記第(n−1)フレームと第(n−2)フレームとの間の前記第1の相関および前記第2の相関と、前記第nフレームと前記第(n+1)フレームとの間の前記第1の相関および前記第2の相関と、前記第(n+1)フレームと第(n+2)フレームとの間の前記第1の相関および前記第2の相関とを検出し、前記判定部は、前記第nフレームと前記第(n−1)フレームとの間で検出した前記第1の相関および前記第2の相関の比較と、前記第(n−1)フレームと前記第(n−2)フレームとの間で検出した前記第1の相関および前記第2の相関の比較と、前記第nフレームと前記第(n+1)フレームとの間で検出した前記第1の相関および前記第2の相関の比較と、前記第(n+1)フレームと前記第(n+2)フレームとの間で検出した前記第1の相関および前記第2の相関の比較とを行い、それぞれの比較結果に基づいて前記判定を行っても良い。
【0009】
また、前記判定部は、各比較結果に基づいて2つのフレームの類似度を求め、前記第nフレームおよび前記第(n−1)フレームの間の類似度と、前記第nフレームおよび前記第(n+1)フレームの間の類似度とが所定の第1の閾値より低く、前記第(n−1)フレームおよび前記第(n−2)フレームの間の類似度と、前記第(n+1)フレームおよび前記第(n+2)フレームの間の類似度とが所定の第2の閾値よりも高い場合に、前記第nフレームに前記不適切なフィールドが混入していると判定しても良い。
【0010】
また、前記検出部は、前記第1の相関および前記第2の相関を求める際に、2つのフィールドに含まれる画素の画素値の差分値を求め、求めた前記差分値に基づいてヒストグラムを作成し、作成した前記ヒストグラムに基づいて、前記第1の相関および前記第2の相関を検出しても良い。
【0011】
また、別の態様のノイズ検知装置は、複数のフレームからなる動画像を検知対象として、任意のフレームを構成するトップフィールドおよびボトムフィールドの何れかに、不適切なフィールドが混入しているか否かを検知するノイズ検知装置であって、処理の対象となる前記動画像を取得する取得部と、前記動画像のうち、任意のフレームの前記トップフィールドおよび前記ボトムフィールドの何れかを第nフィールドとし、前記第nフィールドと読み出し順が前後にそれぞれ連続するフィールドを第(n−1)フィールドおよび第(n+1)フィールドとして、前記第nフィールドと前記第(n−1)フィールドとの間の相関と、前記第(n−1)フィールドと第(n−2)フィールドとの間の相関と、前記第nフィールドと前記第(n+1)フィールドとの間の相関と、前記第(n+1)フィールドと第(n+2)フィールドとの間の相関とを検出する検出部と、前記検出部による検出結果に基づいて4つの相関を相互に比較し、比較結果に基づいて、前記第nフィールドに前記不適切なフィールドが混入しているか否かの判定を行う判定部とを備える。
【0012】
一の態様の再生装置は、動画像を記録する記録部と、前記動画像を再生する再生部と、上述した何れかのノイズ検知装置とを備え、前記取得部は、処理の対象となる前記動画像を前記記録部から取得する。
【0013】
一の態様のノイズ検知プログラムは、複数のフレームからなる動画像を検知対象として、任意のフレームを構成するトップフィールドおよびボトムフィールドの少なくとも一方に、不適切なフィールドが混入しているか否かを検知するノイズ検知処理をコンピュータに実行させるノイズ検知プログラムであって、処理の対象となる前記動画像を取得する取得ステップと、前記動画像のうち、任意のフレームの前記トップフィールドと、前記任意のフレームと連続する少なくとも1つのフレームの前記トップフィールドとの間の相関を第1の相関として検出するとともに、前記任意のフレームの前記ボトムフィールドと、前記任意のフレームと連続する少なくとも1つのフレームの前記ボトムフィールドとの間の相関を第2の相関として検出する検出ステップと、前記検出ステップにおける検出結果に基づいて前記第1の相関と前記第2の相関とを比較し、比較結果に基づいて、前記任意のフレームに前記不適切なフィールドが混入しているか否かの判定を行う判定ステップとを備える。
【発明の効果】
【0014】
本発明によれば、動画像において、不適切なフィールドの混入によるノイズを、的確に自動で検知するための手段を提供することができる。
【図面の簡単な説明】
【0015】
【図1】ノイズ検知装置の構成例を示すブロック図
【図2】ノイズ検知時のノイズ検知装置の動作例を示す流れ図
【図3】ノイズ検知時のノイズ検知装置の動作例を示す流れ図(続き)
【図4】ノイズの検知について説明する図
【図5】ヒストグラムについて説明する図
【図6】ヒストグラムについて説明する別の図
【図7】ノイズの検知について説明する別の図
【図8】ノイズの検知について説明する別の図
【発明を実施するための形態】
【0016】
図1は、実施形態でのノイズ検知装置の構成例を示すブロック図である。ノイズ検知装置には、処理の対象となる動画像(対象動画像)について、ノイズを検知するためのノイズ検知プログラムが予めインストールされる。
【0017】
なお、対象動画像はどのようなものであっても良い。例えば、デジタル画像を生成可能な撮像装置により生成されたものであっても良いし、アナログの動画像の画像データをデジタルデータに変換したものであっても良いし、ビデオテープなどに記録された動画像をデジタルデータに変換したものであっても良い。また、コンピュータなどにより作成された動画像であっても良い。
【0018】
また、以下では、対象動画像の全フレームをノイズ検知の対象として処理を行う例を示すが、対象動画像の一部のフレームのみをノイズ検知の対象として処理を行っても良い。この場合、ノイズ検知の対象となるフレームは、ユーザ操作に基づいて指定されても良いし、対象動画像の情報などに基づいて自動で指定されても良い。
【0019】
図1に示すノイズ検知装置11は、バッファメモリ12、メモリコントローラ13、ノイズ検知部14、CPU15、アラーム出力部16および入出力I/F17、バス18を有している。CPU15は、メモリコントローラ13とバス18を介して相互に接続されるとともに、入出力I/F17と相互に接続される。また、ノイズ検知部14の出力は、バス18を介してCPU15に接続される。さらに、アラーム出力部16は、CPU15により制御される。
【0020】
ノイズ検知装置11に入力された対象動画像の画像データは、メモリコントローラ13に入力されるとともに、ノイズ検知部14にも入力される。メモリコントローラ13に入力された画像データは、バッファメモリ12に書き込まれる。バッファメモリ12は、リングバッファ構成により複数フレームの画像データを残しておくことができる。さらに、バッファメモリ12とメモリコントローラ13は、1フレーム遅延の信号を作成することが可能であり、この遅延された1フレームの画像データは、ノイズ検知部14のうち、後述する差分算出部に入力される。
【0021】
さらに、ノイズ検知装置11には、入出力I/F17を介して、不図示の入力デバイス(キーボード、ポインティングデバイスなど)やモニタ、LAN接続のためのネットワークケーブルなどが接続されている。
【0022】
また、ノイズ検知装置11は、不図示の記憶装置(例えば、ハードディスクや、不揮発性の半導体メモリなどの記憶媒体で構成される)を備える。この記憶装置には、画像処理プログラムや、プログラムの実行に必要となる各種のデータが記録されている。
【0023】
CPU15は、ノイズ検知装置11の各部を統括的に制御するプロセッサである。また、アラーム出力部16は、スピーカ、モニタ、ランプなどの報知部材を備え、ノイズ検知部14による検知結果をユーザに報知する。
【0024】
以上説明した構成のノイズ検知装置11は、ノイズとして、あるフレームのトップフィールドとボトムフィールドとの一方、あるいは、両方に不適切なフィールドが混入するタイプのノイズを検知する。
【0025】
ノイズ検知部14は、図1に示すように、2つのフィールドの差分を算出する差分算出部21と、算出した差分に基づいてヒストグラムを作成するヒストグラム作成部22と、作成したヒストグラムに基づいて上述したノイズの有無を判定するノイズ判定部23とを有する。
【0026】
次に、ノイズの検知の詳細について、図2および図3の流れ図を参照して説明する。
【0027】
なお、図2および図3の流れ図の処理は、ユーザによるプログラム実行指示に応じて、各部がノイズ検知プログラムを実行することで開始される。
【0028】
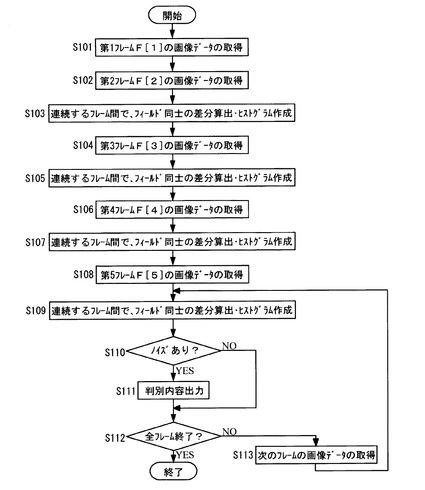
(ステップS101)
ノイズ検知装置11は、ユーザにより指定された対象動画像の第1フレームの画像データを取得する。取得した第1フレームの画像データは、図1に示したメモリコントローラ13に入力される。なお、以下では、第Nフレームの画像をフレームF[N]と称する。第1フレームの画像は、フレームF[1]となる。
【0029】
(ステップS102)
ノイズ検知装置11は、ユーザにより指定された対象動画像の第2フレームの画像データを取得する。取得したフレームF[2]の画像データは、図1に示したメモリコントローラ13に入力されるとともに、ノイズ検知部14の差分算出部21にも入力される。
【0030】
なお、第2フレームの画像データが差分算出部21に入力される際には、1つ前のフレームである第1フレームのフレームF[1]も、メモリコントローラ13から差分算出部21に入力される。
【0031】
(ステップS103)
ノイズ検知装置11は、連続するフレーム(第1フレームおよび第2フレーム)間で、フィールド同士の差分値を算出し、算出した差分値に基づいてヒストグラムの作成を行う。以下では、第Nフレームの画像のトップフィールドをfN[t]と称し、ボトムフィールドをfN[b]と称する。第2フレームの画像のトップフィールドは、f2[t]となり、ボトムフィールドはf2[b]となる。
【0032】
ノイズ検知部14の差分算出部21は、各フィールドのラインに沿って、画素ごとに画素値の差分値を求める。差分値は、類似度が高いほど0に近くなり、類似度が低いほど大きい値になる。差分算出部21は、フレームF[1]およびフレームF[2]間で、以下の2通りの組み合わせで差分値を算出する。
【0033】
(1)フィールドf1[t]とフィールドf2[t]
(2)フィールドf1[b]とフィールドf2[b]
ノイズ検知部14の差分算出部21は、フレームF[1]およびフレームF[2]間で、トップフィールド同士の差分値を画素ごとに求めるとともに、ボトムフィールド同士の差分値を画素ごとに求める。
【0034】
次に、ノイズ検知部14のヒストグラム作成部22は、横軸に差分値、縦軸に画素数を配したヒストグラムを作成する。このヒストグラムは、トップフィールドおよびボトムフィールドのそれぞれについて作成される。
【0035】
(ステップS104)
ノイズ検知装置11は、ユーザにより指定された対象動画像の第3フレームの画像データを取得する。取得したフレームF[3]の画像データは、図1に示したメモリコントローラ13に入力されるとともに、ノイズ検知部14の差分算出部21にも入力される。
【0036】
なお、第3フレームの画像データが差分算出部21に入力される際には、1つ前のフレームである第2フレームのフレームF[2]の画像データも、メモリコントローラ13から差分算出部21に入力される。
【0037】
(ステップS105)
ノイズ検知装置11は、連続するフレーム(第2フレームおよび第3フレーム)間で、ステップS103と同様に、フィールド同士の差分値を算出し、算出した差分値に基づいてヒストグラムの作成を行う。
【0038】
(ステップS106)
ノイズ検知装置11は、ユーザにより指定された対象動画像の第4フレームの画像データを取得する。取得したフレームF[4]の画像データは、図1に示したメモリコントローラ13に入力されるとともに、ノイズ検知部14の差分算出部21にも入力される。
【0039】
なお、第4フレームの画像データが差分算出部21に入力される際には、1つ前のフレームである第3フレームのフレームF[3]の画像データも、メモリコントローラ13から差分算出部21に入力される。
【0040】
(ステップS107)
ノイズ検知装置11は、連続するフレーム(第3フレームおよび第4フレーム)間で、ステップS103と同様に、フィールド同士の差分値を算出し、算出した差分値に基づいてヒストグラムの作成を行う。
【0041】
(ステップS108)
ノイズ検知装置11は、ユーザにより指定された対象動画像の第5フレームの画像データを取得する。取得したフレームF[5]の画像データは、図1に示したメモリコントローラ13に入力されるとともに、ノイズ検知部14の差分算出部21にも入力される。
【0042】
なお、第5フレームの画像データが差分算出部21に入力される際には、1つ前のフレームである第4フレームのフレームF[4]の画像データも、メモリコントローラ13から差分算出部21に入力される。
【0043】
(ステップS109)
ノイズ検知装置11は、連続するフレーム(第4フレームおよび第5フレーム)間で、ステップS103と同様に、フィールド同士の差分値を算出し、算出した差分値に基づいてヒストグラムの作成を行う。
【0044】
なお、2回目以降のステップS109においては、直前のステップS113で取得したフレームと、その直前に取得したフレームとの間で、フィールド同士の差分値を算出し、算出した差分値に基づいてヒストグラムの作成を行う。
【0045】
(ステップS110)
ノイズ検知装置11は、ステップS104で取得したフレームF[3]にノイズがあるか否かを判定する。そして、ノイズがあると判定するとステップS111に進み、ノイズがないと判定すると、後述するステップS112に進む。
【0046】
ノイズがあるか否かの判定は、ノイズ検知部14のノイズ判定部23により行われる。ノイズの判定の詳細は後述する。
【0047】
なお、2回目以降のステップS110においては、直前のステップS113で取得したフレームの2つ前のフレームにノイズがあるか否かを判定する。
【0048】
(ステップS111)
ノイズ検知装置11のノイズ検知部14は、判別内容として、ノイズが存在することを示す情報を、バス18を介してCPU15に出力する。
【0049】
(ステップS112)
ノイズ検知装置11のCPU15は、ステップS109からステップS111の処理を、全フレーム分行ったか否かを判定する。CPU15は、全フレーム分終了したと判定すると一連の処理を終了し、全フレーム分終了していないと判定すると、ステップS113に進む。
【0050】
(ステップS113)
ノイズ検知装置11は、対象動画像の次のフレームの画像の画像データを取得し、ステップS109に戻る。なお、ステップS113で取得されたフレームの画像データが差分算出部21に入力される際には、ステップS102と同様に、1つ前のフレームの画像データも、メモリコントローラ13から差分算出部21に入力される。
【0051】
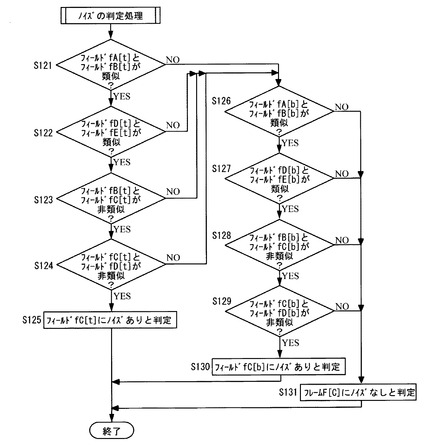
次に、図3の流れ図および図4から図6の模式図を参照して、図2の流れ図のステップS110におけるノイズの判定について説明する。
【0052】
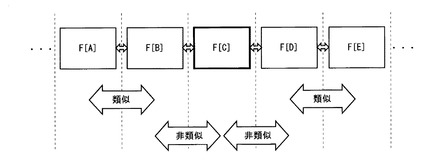
ノイズ検知装置11における検知対象のノイズは、上述したように、あるフレームのトップフィールドとボトムフィールドとの一方、あるいは、両方に不適切なフィールドが混入するタイプのノイズである。そこで、あるフレームにおいて不適切なフィールドが混入しているか否かを、前後2枚ずつ、計4枚のフレームとの相関を見ることにより判定することができる。図4は、ノイズの検知について説明する図である。以下では、図4に示す連続する5つのフレーム(フレームF[A]、フレームF[B]、フレームF[C]、フレームF[D]、フレームF[E])を用いて、中央のフレームF[C]に不適切なフィールドが混入しているか否かを判定する場合を例に挙げて説明する。
【0053】
読み出し順がフレームF[A]、フレームF[B]、フレームF[C]、フレームF[D]、フレームF[E]である際に、フレームF[C]に不適切なフィールドが混入していない場合には、図4に示すように、隣り合うフレーム(フレームF[A]とフレームF[B]、フレームF[B]とフレームF[C]、フレームF[C]とフレームF[D]、フレームF[D]とフレームF[E])はそれぞれ、相関が高く、類似のものとなる。
【0054】
一方、フレームF[C]に不適切なフィールドが混入している場合には、図4に示すように、フレームF[C]と隣り合うフレーム(フレームF[B]とフレームF[C]、フレームF[C]とフレームF[D])はそれぞれ、相関が低く、非類似のものとなる。また、さらに両側に隣り合うフレーム(フレームF[A]とフレームF[B]、フレームF[D]とフレームF[E])は、不適切なフィールドの混入がないため、それぞれ、相関が高く、類似のものとなる。
【0055】
特に、フレームF[C]のトップフィールドfC[t]に不適切なフィールドが混入している場合には、フレームF[C]のトップフィールドfC[t]と隣り合うフィールド(フレームF[B]のトップフィールドfB[t]とフレームF[C]のトップフィールドfC[t]、フレームF[C]のトップフィールドfC[t]とフレームF[D]のトップフィールドfD[t])はそれぞれ、相関が低く、非類似のものとなる。また、フレームF[C]のボトムフィールドfC[b]に不適切なフィールドが混入している場合には、フレームF[C]のボトムフィールドfC[b]と隣り合うフィールド(フレームF[B]のボトムフィールドfB[b]とフレームF[C]のボトムフィールドfC[b]、フレームF[C]のボトムフィールドfC[b]とフレームF[D]のボトムフィールドfD[b])はそれぞれ、相関が低く、非類似のものとなる。
【0056】
ノイズ検知部14のノイズ判定部23は、上述した特性を見ることにより、フレームF[C]に不適切なフィールドが混入しているか否かを判定する。ノイズ判定部23は、図2のステップS103、ステップS105、ステップS107、ステップS109でそれぞれ作成したヒストグラムに基づいて、上述した特性を見ることにより、フレームF[C]に不適切なフィールドが混入しているか否かを判定する。
【0057】
以下、具体的なノイズの判定処理について説明する。
【0058】
(ステップS121)
ノイズ判定部23は、フレームF[A]のトップフィールドfA[t]と、フレームF[B]のトップフィールドfB[t]とが類似であるか否かを判定する。この判定は、連続するフレームであるフレームF[A]のトップフィールドfA[t]とフレームF[B]のトップフィールドfB[t]との間に関して作成されたヒストグラムに基づいて行われる。ノイズ判定部23は、フレームF[A]のトップフィールドfA[t]と、フレームF[B]のトップフィールドfB[t]とが類似であると判定するとステップS122に進み、類似でないと判定すると後述するステップS126に進む。
【0059】
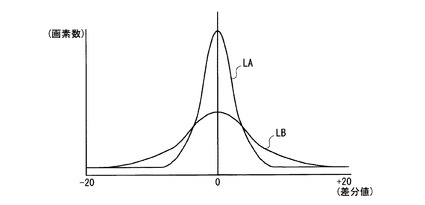
図5に、上述したヒストグラムの例を示す。図5のLAは、ヒストグラムの作成に用いたフィールド間の類似度が高い場合のヒストグラムの例を示し、図5のLBは、ヒストグラムの作成に用いたフィールド間の類似度が低い場合のヒストグラムの例を示す。ヒストグラムの作成に用いたフィールド間の類似度が高い場合には、図5のLAに示すように、差分値が0近傍の画素数が多く、ヒストグラムはカーブが急峻な形状となる。一方、ヒストグラムの作成に用いたフィールド間の類似度が低い場合には、図5のLBに示すように、差分値がばらつくため、ヒストグラムはカーブが緩やかな形状となる。
【0060】
ノイズ判定部23は、フレームF[A]のトップフィールドfA[t]と、フレームF[B]のトップフィールドfB[t]とが類似であるか否かを判定するために、ヒストグラムに複数の閾値を適用し、各閾値との比較を行うことによりヒストグラムの形状を推定し、推定結果に応じて上述の判定を行う。
【0061】
ノイズ判定部23は、まず、フレームF[A]のトップフィールドfA[t]とフレームF[B]のトップフィールドfB[t]との間に関して作成されたヒストグラムのうち、差分値が所定の範囲内(例えば、±20以内)の部分を処理対象として選択する。
【0062】
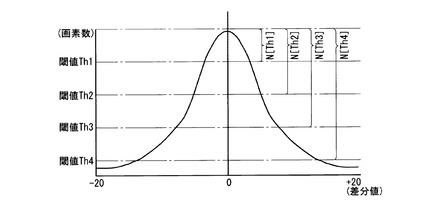
次に、ノイズ判定部23は、図6に示すように、ヒストグラムに対して4つの閾値(閾値Th1〜閾値Th4)を適用する。閾値Th1から閾値Th4は、それぞれ、予め定められた閾値であり、閾値Th1>閾値Th2>閾値Th3>閾値Th4の関係を有する。そして、ノイズ判定部23は、各閾値を超える画素数をそれぞれカウントする。すなわち、ノイズ判定部23は、閾値Th1を超える画素数N[Th1]、閾値Th2を超える画素数N[Th2]、閾値Th3を超える画素数N[Th3]、閾値Th4を超える画素数N[Th4]をそれぞれカウントする。
【0063】
ノイズ判定部23は、画素数N[Th1]、画素数N[Th2]、画素数N[Th3]、画素数N[Th4]が以下の(1)および(2)の条件を満たす場合には、ヒストグラムはカーブが急峻な形状であり、ヒストグラムの作成に用いたフィールド間の類似度が高いので、2つのフィールドは類似であると判定する。一方、以下の(1)および(2)の一方、または、両方の条件を満たさない場合には、ノイズ判定部23は、ヒストグラムはカーブが緩やかな形状であり、ヒストグラムの作成に用いたフィールド間の類似度が低いので、2つのフィールドは非類似である(類似でない)と判定する。
【0064】
(1)画素数N[Th1]、画素数N[Th2]、画素数N[Th3]、画素数N[Th4]が以下の3式の少なくとも1つを満たす。
【0065】
画素数N[Th1]×N>画素数N[Th2] ・・・(式1)
画素数N[Th2]×N>画素数N[Th3] ・・・(式2)
画素数N[Th3]×N>画素数N[Th4] ・・・(式3)
式1から式3中のNは所定の係数(例えば、N=2程度の値)であり、2種類の画素数の大小の判定を確実に行うための値が実験などにより求められる。例えば、この係数Nが1以下の値である場合、2種類の画素数の差が非常に小さい場合に大小関係が逆転してしまったり、差が非常に小さい場合でも各式を満たしてしまったりする可能性もあり、誤検出の可能性が高くなる。そのため、係数Nを適切に設定することにより、差がある程度明確である場合にのみ、各式を満たすようになり、誤検出の可能性が低くなる。
【0066】
上述した3式の少なくとも1つを満たす場合には、ヒストグラムはカーブが急峻な形状であると推定できる。
【0067】
(2)画素数N[Th4]が以下の式を満たす。
【0068】
画素数N[Th4]>閾値Th5 ・・・(式4)
ここで、画素数N[Th4]が閾値Th5よりも大きい場合とは、判定に用いられるヒストグラム(例えば、±20以内の部分)に、ある程度の母体数が存在する場合である。このような場合には、ヒストグラムに応じて、ヒストグラムの形状の適切な推定を行うことができると判定できる。
【0069】
一方、画素数N[Th4]が閾値Th5よりも小さい場合とは、判定に用いられるヒストグラム(例えば、±20以内の部分)に、十分な程度の母体数が存在しない場合である。このような場合には、ヒストグラムに応じて、ヒストグラムの形状の適切な推定を行うことができないと判定できる。
【0070】
なお、式4中の閾値Th5は予め定められた閾値であり、上述した判定に適した値が実験などにより求められる。
【0071】
ノイズ判定部23は、上述した一連の判定方法にしたがって、フレームF[A]のトップフィールドfA[t]と、フレームF[B]のトップフィールドfB[t]とが類似であるか否かを判定する。
【0072】
ここで、フレームF[A]のトップフィールドfA[t]と、フレームF[B]のトップフィールドfB[t]とが類似である場合には、図4で説明したように、フレームF[C]に不適切なフィールドが混入している可能性があると考えられる。ただし、単純にシーンが変わっている場合にも同じ結果となる場合があるため、その他の特性を見るために、ステップS122に進む。
【0073】
一方、フレームF[A]のトップフィールドfA[t]と、フレームF[B]のトップフィールドfB[t]とが類似でない場合には、フレームF[C]に不適切なフィールドが混入している可能性が低いと考えられるため、後述するステップS122からステップS125の処理を行わずにステップS129に進む。
【0074】
(ステップS122)
ノイズ判定部23は、フレームF[D]のトップフィールドfD[t]と、フレームF[E]のトップフィールドfE[t]とが類似であるか否かを判定する。この判定は、連続するフレームであるフレームF[D]とフレームF[E]との間に関して作成されたヒストグラムに基づいて、ステップS121と同様に行われる。ノイズ判定部23は、フレームF[D]のトップフィールドfD[t]と、フレームF[E]のトップフィールドfE[t]とが類似であると判定するとステップS123に進み、類似でないと判定すると後述するステップS126に進む。
【0075】
(ステップS123)
ノイズ判定部23は、フレームF[B]のトップフィールドfB[t]と、フレームF[C]のトップフィールドfC[t]とが非類似であるか否かを判定する。この判定は、連続するフレームであるフレームF[B]とフレームF[C]との間に関して作成されたヒストグラムに基づいて、ステップS121と同様に行われる。ノイズ判定部23は、フレームF[B]のトップフィールドfB[t]と、フレームF[C]のトップフィールドfC[t]とが非類似である(類似でない)と判定するとステップS124に進み、非類似でない(類似である)と判定すると後述するステップS126に進む。
【0076】
(ステップS124)
ノイズ判定部23は、フレームF[C]のトップフィールドfC[t]と、フレームF[D]のトップフィールドfD[t]とが非類似であるか否かを判定する。この判定は、連続するフレームであるフレームF[C]とフレームF[D]との間に関して作成されたヒストグラムに基づいて、ステップS121と同様に行われる。ノイズ判定部23は、フレームF[C]のトップフィールドfC[t]と、フレームF[D]のトップフィールドfD[t]とが非類似である(類似でない)と判定するとステップS125に進み、非類似でない(類似である)と判定すると後述するステップS126に進む。
【0077】
(ステップS125)
ノイズ判定部23は、フレームF[C]のトップフィールドfC[t]に不適切なフィールドが混入している、すなわち、フレームF[C]のトップフィールドfC[t]にノイズありと判定し、一連の処理を終了する。
【0078】
(ステップS126からステップS129)
ノイズ判定部23は、それぞれ、ステップS121からステップS124で説明した処理と同様の処理を行う。ただし、ステップS121からステップS124では、各フレームのトップフィールドを対象として行った各処理を、ステップS126からステップS129では、各フレームのボトムフィールドを対象として行う。
【0079】
(ステップS130)
ノイズ判定部23は、フレームF[C]のボトムフィールドfC[b]に不適切なフィールドが混入している、すなわち、フレームF[C]のボトムフィールドfC[b]にノイズありと判定し、一連の処理を終了する。
【0080】
(ステップS131)
ノイズ判定部23は、フレームF[C]のトップフィールドfC[t]にもボトムフィールドfC[b]にも不適切なフィールドが混入していない、すなわち、フレームF[C]にノイズなしと判定し、一連の処理を終了する。
【0081】
なお、以降のフレームにおけるノイズの判定も同様に行われる。例えば、フレームF[D]にノイズがあるか否かの判定は、フレームF[B]、フレームF[C]、フレームF[D]、フレームF[E]、フレームF[F]の間でそれぞれ作成したヒストグラムに基づいて行うことができる。このとき、フレームF[B]およびフレームF[C]の間のヒストグラム、フレームF[C]およびフレームF[D]の間のヒストグラム、フレームF[D]およびフレームF[E]の間のヒストグラムは、上述したフレームF[C]にノイズがあるか否かの判定時に既に求められている。したがって、既に求めた値等については繰り返し処理を行わず、前回の処理、演算結果を利用しても良い。
【0082】
以上説明した一連のノイズの検知の結果は、アラーム出力部16を介したユーザへの報知に用いられても良いし、入出力I/F17を介してノイズ検知装置11の外部に出力されても良い。また、対象動画像のタグ情報などに、検知したノイズの種類などを示す情報として記録しても良い。
【0083】
また、上述の例で説明した各処理は、ハードウエアで行っても良いし、CPU15によるソフトウェアで行っても良い。
【0084】
上記のように、本実施形態のノイズ検知装置は、複数のフレームからなる動画像を検知対象として、任意のフレームを構成するトップフィールドおよびボトムフィールドの少なくとも一方に、不適切なフィールドが混入しているか否かを検知するノイズ検知装置であって、処理の対象となる動画像を取得し、取得した動画像のうち、任意のフレームのトップフィールドと、任意のフレームと連続する少なくとも1つのフレームのトップフィールドとの間の相関を第1の相関として検出するとともに、任意のフレームのボトムフィールドと、任意のフレームと連続する少なくとも1つのフレームのボトムフィールドとの間の相関を第2の相関として検出する。そして、検出結果に基づいて第1の相関と第2の相関とを比較し、比較結果に基づいて、任意のフレームに不適切なフィールドが混入しているか否かの判定を行うものである。
【0085】
よって、本実施形態の構成によれば、動画像において、不適切なフィールドの混入によるノイズを、的確に自動で検知することができる。特に、本実施形態の構成によれば、フレームまたはフィールド単位で検知を行うことができるため、1フィールドの不適切なフィールドの混入による瞬間的なノイズも的確に自動で検知することができる。
【0086】
なお、上述した例では、ユーザによるプログラム実行指示に応じて、一連の処理を実行する例を示したが、本発明はこの例に限定されない。例えば、ノイズ検知装置11が何らかの動画像の画像データを読み込むたびに、自動で一連の処理を実行しても良い。
【0087】
<実施形態の補足事項>
(1)上記実施形態で説明した各閾値や係数などは一例であり本発明はこの例に限定されない。
【0088】
(2)上記実施形態のノイズ検知における差分値の算出方法やヒストグラムの作成方法は一例であり、本発明はこの例に限定されない。例えば、上記実施形態で説明した以外の方法で差分値を算出したり、ヒストグラムを作成したりして良い。また、差分値やヒストグラム以外のファクターを用いても良い。例えば、分散などの統計的な手法を用いても良い。
【0089】
さらに、上記実施形態では、フィールド同士の差分値を算出し、ヒストグラムを作成する例を示したが、本発明はこの例に限定されない。例えば、図7に示すように、隣り合うフレーム同士の差分値を算出し、ヒストグラムを作成して、フレーム単位で不適切なフィールド(フレーム)の混入を検知しても良い。
【0090】
また、上記実施形態では、隣り合うフレームのトップフィールド同士と、ボトムフィールド同士とで、それぞれ差分値を算出し、ヒストグラムを作成する例を示したが、本発明はこの例に限定されない。例えば、図8に示すように、読み出し順が隣り合うフィールド同士の差分値を算出し、ヒストグラムを作成して、フィールド単位で不適切なフィールドの混入を検知しても良い。図8の例では、図3のステップS121からステップS124において、それぞれ、フレームF[A]のトップフィールドfA[t]およびボトムフィールドfA[b]の類似性と、フレームF[A]のボトムフィールドfA[b]およびフレームF[B]のトップフィールドfB[t]の類似性と、F[B]のトップフィールドfB[t]およびボトムフィールドfB[b]の類似性と、フレームF[B]のボトムフィールドfB[b]およびフレームF[C]のトップフィールドfC[t]の類似性とを見ることにより、中央のフィールドであるフレームF[B]のトップフィールドfB[t]にノイズがあるか否かを判定することができる。
【0091】
(3)上記実施形態のノイズ検知における各判定の方法は一例であり、本発明はこの例に限定されない。例えば、図2および図3で説明した各処理の順番を適宜入れ替えても良い。
【0092】
(4)上記実施形態で示したノイズは一例であり、本発明はこの例に限定されない。例えば、上記実施形態の例では、不適切なフィールドが1フィールド、または、2フィールド単位で混入する前提で説明を行ったが、不適切なフィールドが3フィールド以上の数フィールドに渡って混入するノイズについても、本発明を同様に適用することができる。
【0093】
(5)上記実施形態で説明したノイズ検知装置による処理を実行するノイズ検知プログラムも本発明の具体的態様として有効である。このノイズ検知プログラムは、磁気ディスクなどの記憶媒体に記憶されたものであっても良いし、インターネットなどを介してダウンロード可能なものであっても良い。また、上記実施形態で説明したノイズ検知装置を備えた画像処理装置、撮像装置や再生装置(例えば、フォトビューアー、デジタルフォトフレーム、各種印刷装置など)も本発明の具体的態様として有効である。上述した再生装置においては、画像の再生を行う際に一連の処理を実行する構成としても良い。
【0094】
以上の詳細な説明により、実施形態の特徴点および利点は明らかになるであろう。これは、特許請求の範囲が、その精神および権利範囲を逸脱しない範囲で前述のような実施形態の特徴点および利点にまで及ぶことを意図する。また、当該技術分野において通常の知識を有する者であれば、あらゆる改良および変更に容易に想到できるはずであり、発明性を有する実施形態の範囲を前述したものに限定する意図はなく、実施形態に開示された範囲に含まれる適当な改良物および均等物によることも可能である。
【符号の説明】
【0095】
11…ノイズ検知装置、14…ノイズ検知部、15…CPU、21…差分算出部、22…ヒストグラム作成部、23…ノイズ判定部
【技術分野】
【0001】
本発明は、ノイズ検知装置、再生装置、およびノイズ検知プログラムに関する。
【背景技術】
【0002】
画像においては、様々なノイズが発生することが知られている。例えば、動画像において、あるフレームのトップフィールドとボトムフィールドとの一方、あるいは、両方に不適切なフィールドが混入する現象が知られている。このようなノイズは、カット代わりの部分で意図しないフレームやフィールドが混入してしまうものであり、要因としては、動画像の編集する際の操作ミスや、動画像を複数の機材間で複製する際の機械的な要因、ソフトウェア上の要因などが考えられる。何れの場合であっても、このようなノイズは、目視により検知せざるを得ず、検知に時間や手間を要するという問題がある。また、上述したノイズは瞬間的に(例えば数フレームのみ)発生する場合が多く、慎重に確認を行わないと見逃しが発生する場合もある。
【0003】
そこで、このようなノイズの検知を自動化することが考えられている。例えば、特許文献1の発明では、映像信号自身より映像情報成分の異常を自動的に検知する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平9−46733号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、特許文献1の発明は、映像のフリーズ状態およびシーンチェンジを検出するものに過ぎず、上述した不適切なフィールドの混入によるノイズの検知のような細かい検出を行うことはできない。
【0006】
本発明の目的は、動画像において、不適切なフィールドの混入によるノイズを、的確に自動で検知するための手段を提供することにある。
【課題を解決するための手段】
【0007】
一の態様のノイズ検知装置は、複数のフレームからなる動画像を検知対象として、任意のフレームを構成するトップフィールドおよびボトムフィールドの少なくとも一方に、不適切なフィールドが混入しているか否かを検知するノイズ検知装置であって、処理の対象となる前記動画像を取得する取得部と、前記動画像のうち、任意のフレームの前記トップフィールドと、前記任意のフレームと連続する少なくとも1つのフレームの前記トップフィールドとの間の相関を第1の相関として検出するとともに、前記任意のフレームの前記ボトムフィールドと、前記任意のフレームと連続する少なくとも1つのフレームの前記ボトムフィールドとの間の相関を第2の相関として検出する検出部と、前記検出部による検出結果に基づいて前記第1の相関と前記第2の相関とを比較し、比較結果に基づいて、前記任意のフレームに前記不適切なフィールドが混入しているか否かの判定を行う判定部とを備える。
【0008】
なお、前記任意のフレームを第nフレームとすると、前記検出部は、前記第nフレームと第(n−1)フレームとの間の前記第1の相関および前記第2の相関と、前記第(n−1)フレームと第(n−2)フレームとの間の前記第1の相関および前記第2の相関と、前記第nフレームと前記第(n+1)フレームとの間の前記第1の相関および前記第2の相関と、前記第(n+1)フレームと第(n+2)フレームとの間の前記第1の相関および前記第2の相関とを検出し、前記判定部は、前記第nフレームと前記第(n−1)フレームとの間で検出した前記第1の相関および前記第2の相関の比較と、前記第(n−1)フレームと前記第(n−2)フレームとの間で検出した前記第1の相関および前記第2の相関の比較と、前記第nフレームと前記第(n+1)フレームとの間で検出した前記第1の相関および前記第2の相関の比較と、前記第(n+1)フレームと前記第(n+2)フレームとの間で検出した前記第1の相関および前記第2の相関の比較とを行い、それぞれの比較結果に基づいて前記判定を行っても良い。
【0009】
また、前記判定部は、各比較結果に基づいて2つのフレームの類似度を求め、前記第nフレームおよび前記第(n−1)フレームの間の類似度と、前記第nフレームおよび前記第(n+1)フレームの間の類似度とが所定の第1の閾値より低く、前記第(n−1)フレームおよび前記第(n−2)フレームの間の類似度と、前記第(n+1)フレームおよび前記第(n+2)フレームの間の類似度とが所定の第2の閾値よりも高い場合に、前記第nフレームに前記不適切なフィールドが混入していると判定しても良い。
【0010】
また、前記検出部は、前記第1の相関および前記第2の相関を求める際に、2つのフィールドに含まれる画素の画素値の差分値を求め、求めた前記差分値に基づいてヒストグラムを作成し、作成した前記ヒストグラムに基づいて、前記第1の相関および前記第2の相関を検出しても良い。
【0011】
また、別の態様のノイズ検知装置は、複数のフレームからなる動画像を検知対象として、任意のフレームを構成するトップフィールドおよびボトムフィールドの何れかに、不適切なフィールドが混入しているか否かを検知するノイズ検知装置であって、処理の対象となる前記動画像を取得する取得部と、前記動画像のうち、任意のフレームの前記トップフィールドおよび前記ボトムフィールドの何れかを第nフィールドとし、前記第nフィールドと読み出し順が前後にそれぞれ連続するフィールドを第(n−1)フィールドおよび第(n+1)フィールドとして、前記第nフィールドと前記第(n−1)フィールドとの間の相関と、前記第(n−1)フィールドと第(n−2)フィールドとの間の相関と、前記第nフィールドと前記第(n+1)フィールドとの間の相関と、前記第(n+1)フィールドと第(n+2)フィールドとの間の相関とを検出する検出部と、前記検出部による検出結果に基づいて4つの相関を相互に比較し、比較結果に基づいて、前記第nフィールドに前記不適切なフィールドが混入しているか否かの判定を行う判定部とを備える。
【0012】
一の態様の再生装置は、動画像を記録する記録部と、前記動画像を再生する再生部と、上述した何れかのノイズ検知装置とを備え、前記取得部は、処理の対象となる前記動画像を前記記録部から取得する。
【0013】
一の態様のノイズ検知プログラムは、複数のフレームからなる動画像を検知対象として、任意のフレームを構成するトップフィールドおよびボトムフィールドの少なくとも一方に、不適切なフィールドが混入しているか否かを検知するノイズ検知処理をコンピュータに実行させるノイズ検知プログラムであって、処理の対象となる前記動画像を取得する取得ステップと、前記動画像のうち、任意のフレームの前記トップフィールドと、前記任意のフレームと連続する少なくとも1つのフレームの前記トップフィールドとの間の相関を第1の相関として検出するとともに、前記任意のフレームの前記ボトムフィールドと、前記任意のフレームと連続する少なくとも1つのフレームの前記ボトムフィールドとの間の相関を第2の相関として検出する検出ステップと、前記検出ステップにおける検出結果に基づいて前記第1の相関と前記第2の相関とを比較し、比較結果に基づいて、前記任意のフレームに前記不適切なフィールドが混入しているか否かの判定を行う判定ステップとを備える。
【発明の効果】
【0014】
本発明によれば、動画像において、不適切なフィールドの混入によるノイズを、的確に自動で検知するための手段を提供することができる。
【図面の簡単な説明】
【0015】
【図1】ノイズ検知装置の構成例を示すブロック図
【図2】ノイズ検知時のノイズ検知装置の動作例を示す流れ図
【図3】ノイズ検知時のノイズ検知装置の動作例を示す流れ図(続き)
【図4】ノイズの検知について説明する図
【図5】ヒストグラムについて説明する図
【図6】ヒストグラムについて説明する別の図
【図7】ノイズの検知について説明する別の図
【図8】ノイズの検知について説明する別の図
【発明を実施するための形態】
【0016】
図1は、実施形態でのノイズ検知装置の構成例を示すブロック図である。ノイズ検知装置には、処理の対象となる動画像(対象動画像)について、ノイズを検知するためのノイズ検知プログラムが予めインストールされる。
【0017】
なお、対象動画像はどのようなものであっても良い。例えば、デジタル画像を生成可能な撮像装置により生成されたものであっても良いし、アナログの動画像の画像データをデジタルデータに変換したものであっても良いし、ビデオテープなどに記録された動画像をデジタルデータに変換したものであっても良い。また、コンピュータなどにより作成された動画像であっても良い。
【0018】
また、以下では、対象動画像の全フレームをノイズ検知の対象として処理を行う例を示すが、対象動画像の一部のフレームのみをノイズ検知の対象として処理を行っても良い。この場合、ノイズ検知の対象となるフレームは、ユーザ操作に基づいて指定されても良いし、対象動画像の情報などに基づいて自動で指定されても良い。
【0019】
図1に示すノイズ検知装置11は、バッファメモリ12、メモリコントローラ13、ノイズ検知部14、CPU15、アラーム出力部16および入出力I/F17、バス18を有している。CPU15は、メモリコントローラ13とバス18を介して相互に接続されるとともに、入出力I/F17と相互に接続される。また、ノイズ検知部14の出力は、バス18を介してCPU15に接続される。さらに、アラーム出力部16は、CPU15により制御される。
【0020】
ノイズ検知装置11に入力された対象動画像の画像データは、メモリコントローラ13に入力されるとともに、ノイズ検知部14にも入力される。メモリコントローラ13に入力された画像データは、バッファメモリ12に書き込まれる。バッファメモリ12は、リングバッファ構成により複数フレームの画像データを残しておくことができる。さらに、バッファメモリ12とメモリコントローラ13は、1フレーム遅延の信号を作成することが可能であり、この遅延された1フレームの画像データは、ノイズ検知部14のうち、後述する差分算出部に入力される。
【0021】
さらに、ノイズ検知装置11には、入出力I/F17を介して、不図示の入力デバイス(キーボード、ポインティングデバイスなど)やモニタ、LAN接続のためのネットワークケーブルなどが接続されている。
【0022】
また、ノイズ検知装置11は、不図示の記憶装置(例えば、ハードディスクや、不揮発性の半導体メモリなどの記憶媒体で構成される)を備える。この記憶装置には、画像処理プログラムや、プログラムの実行に必要となる各種のデータが記録されている。
【0023】
CPU15は、ノイズ検知装置11の各部を統括的に制御するプロセッサである。また、アラーム出力部16は、スピーカ、モニタ、ランプなどの報知部材を備え、ノイズ検知部14による検知結果をユーザに報知する。
【0024】
以上説明した構成のノイズ検知装置11は、ノイズとして、あるフレームのトップフィールドとボトムフィールドとの一方、あるいは、両方に不適切なフィールドが混入するタイプのノイズを検知する。
【0025】
ノイズ検知部14は、図1に示すように、2つのフィールドの差分を算出する差分算出部21と、算出した差分に基づいてヒストグラムを作成するヒストグラム作成部22と、作成したヒストグラムに基づいて上述したノイズの有無を判定するノイズ判定部23とを有する。
【0026】
次に、ノイズの検知の詳細について、図2および図3の流れ図を参照して説明する。
【0027】
なお、図2および図3の流れ図の処理は、ユーザによるプログラム実行指示に応じて、各部がノイズ検知プログラムを実行することで開始される。
【0028】
(ステップS101)
ノイズ検知装置11は、ユーザにより指定された対象動画像の第1フレームの画像データを取得する。取得した第1フレームの画像データは、図1に示したメモリコントローラ13に入力される。なお、以下では、第Nフレームの画像をフレームF[N]と称する。第1フレームの画像は、フレームF[1]となる。
【0029】
(ステップS102)
ノイズ検知装置11は、ユーザにより指定された対象動画像の第2フレームの画像データを取得する。取得したフレームF[2]の画像データは、図1に示したメモリコントローラ13に入力されるとともに、ノイズ検知部14の差分算出部21にも入力される。
【0030】
なお、第2フレームの画像データが差分算出部21に入力される際には、1つ前のフレームである第1フレームのフレームF[1]も、メモリコントローラ13から差分算出部21に入力される。
【0031】
(ステップS103)
ノイズ検知装置11は、連続するフレーム(第1フレームおよび第2フレーム)間で、フィールド同士の差分値を算出し、算出した差分値に基づいてヒストグラムの作成を行う。以下では、第Nフレームの画像のトップフィールドをfN[t]と称し、ボトムフィールドをfN[b]と称する。第2フレームの画像のトップフィールドは、f2[t]となり、ボトムフィールドはf2[b]となる。
【0032】
ノイズ検知部14の差分算出部21は、各フィールドのラインに沿って、画素ごとに画素値の差分値を求める。差分値は、類似度が高いほど0に近くなり、類似度が低いほど大きい値になる。差分算出部21は、フレームF[1]およびフレームF[2]間で、以下の2通りの組み合わせで差分値を算出する。
【0033】
(1)フィールドf1[t]とフィールドf2[t]
(2)フィールドf1[b]とフィールドf2[b]
ノイズ検知部14の差分算出部21は、フレームF[1]およびフレームF[2]間で、トップフィールド同士の差分値を画素ごとに求めるとともに、ボトムフィールド同士の差分値を画素ごとに求める。
【0034】
次に、ノイズ検知部14のヒストグラム作成部22は、横軸に差分値、縦軸に画素数を配したヒストグラムを作成する。このヒストグラムは、トップフィールドおよびボトムフィールドのそれぞれについて作成される。
【0035】
(ステップS104)
ノイズ検知装置11は、ユーザにより指定された対象動画像の第3フレームの画像データを取得する。取得したフレームF[3]の画像データは、図1に示したメモリコントローラ13に入力されるとともに、ノイズ検知部14の差分算出部21にも入力される。
【0036】
なお、第3フレームの画像データが差分算出部21に入力される際には、1つ前のフレームである第2フレームのフレームF[2]の画像データも、メモリコントローラ13から差分算出部21に入力される。
【0037】
(ステップS105)
ノイズ検知装置11は、連続するフレーム(第2フレームおよび第3フレーム)間で、ステップS103と同様に、フィールド同士の差分値を算出し、算出した差分値に基づいてヒストグラムの作成を行う。
【0038】
(ステップS106)
ノイズ検知装置11は、ユーザにより指定された対象動画像の第4フレームの画像データを取得する。取得したフレームF[4]の画像データは、図1に示したメモリコントローラ13に入力されるとともに、ノイズ検知部14の差分算出部21にも入力される。
【0039】
なお、第4フレームの画像データが差分算出部21に入力される際には、1つ前のフレームである第3フレームのフレームF[3]の画像データも、メモリコントローラ13から差分算出部21に入力される。
【0040】
(ステップS107)
ノイズ検知装置11は、連続するフレーム(第3フレームおよび第4フレーム)間で、ステップS103と同様に、フィールド同士の差分値を算出し、算出した差分値に基づいてヒストグラムの作成を行う。
【0041】
(ステップS108)
ノイズ検知装置11は、ユーザにより指定された対象動画像の第5フレームの画像データを取得する。取得したフレームF[5]の画像データは、図1に示したメモリコントローラ13に入力されるとともに、ノイズ検知部14の差分算出部21にも入力される。
【0042】
なお、第5フレームの画像データが差分算出部21に入力される際には、1つ前のフレームである第4フレームのフレームF[4]の画像データも、メモリコントローラ13から差分算出部21に入力される。
【0043】
(ステップS109)
ノイズ検知装置11は、連続するフレーム(第4フレームおよび第5フレーム)間で、ステップS103と同様に、フィールド同士の差分値を算出し、算出した差分値に基づいてヒストグラムの作成を行う。
【0044】
なお、2回目以降のステップS109においては、直前のステップS113で取得したフレームと、その直前に取得したフレームとの間で、フィールド同士の差分値を算出し、算出した差分値に基づいてヒストグラムの作成を行う。
【0045】
(ステップS110)
ノイズ検知装置11は、ステップS104で取得したフレームF[3]にノイズがあるか否かを判定する。そして、ノイズがあると判定するとステップS111に進み、ノイズがないと判定すると、後述するステップS112に進む。
【0046】
ノイズがあるか否かの判定は、ノイズ検知部14のノイズ判定部23により行われる。ノイズの判定の詳細は後述する。
【0047】
なお、2回目以降のステップS110においては、直前のステップS113で取得したフレームの2つ前のフレームにノイズがあるか否かを判定する。
【0048】
(ステップS111)
ノイズ検知装置11のノイズ検知部14は、判別内容として、ノイズが存在することを示す情報を、バス18を介してCPU15に出力する。
【0049】
(ステップS112)
ノイズ検知装置11のCPU15は、ステップS109からステップS111の処理を、全フレーム分行ったか否かを判定する。CPU15は、全フレーム分終了したと判定すると一連の処理を終了し、全フレーム分終了していないと判定すると、ステップS113に進む。
【0050】
(ステップS113)
ノイズ検知装置11は、対象動画像の次のフレームの画像の画像データを取得し、ステップS109に戻る。なお、ステップS113で取得されたフレームの画像データが差分算出部21に入力される際には、ステップS102と同様に、1つ前のフレームの画像データも、メモリコントローラ13から差分算出部21に入力される。
【0051】
次に、図3の流れ図および図4から図6の模式図を参照して、図2の流れ図のステップS110におけるノイズの判定について説明する。
【0052】
ノイズ検知装置11における検知対象のノイズは、上述したように、あるフレームのトップフィールドとボトムフィールドとの一方、あるいは、両方に不適切なフィールドが混入するタイプのノイズである。そこで、あるフレームにおいて不適切なフィールドが混入しているか否かを、前後2枚ずつ、計4枚のフレームとの相関を見ることにより判定することができる。図4は、ノイズの検知について説明する図である。以下では、図4に示す連続する5つのフレーム(フレームF[A]、フレームF[B]、フレームF[C]、フレームF[D]、フレームF[E])を用いて、中央のフレームF[C]に不適切なフィールドが混入しているか否かを判定する場合を例に挙げて説明する。
【0053】
読み出し順がフレームF[A]、フレームF[B]、フレームF[C]、フレームF[D]、フレームF[E]である際に、フレームF[C]に不適切なフィールドが混入していない場合には、図4に示すように、隣り合うフレーム(フレームF[A]とフレームF[B]、フレームF[B]とフレームF[C]、フレームF[C]とフレームF[D]、フレームF[D]とフレームF[E])はそれぞれ、相関が高く、類似のものとなる。
【0054】
一方、フレームF[C]に不適切なフィールドが混入している場合には、図4に示すように、フレームF[C]と隣り合うフレーム(フレームF[B]とフレームF[C]、フレームF[C]とフレームF[D])はそれぞれ、相関が低く、非類似のものとなる。また、さらに両側に隣り合うフレーム(フレームF[A]とフレームF[B]、フレームF[D]とフレームF[E])は、不適切なフィールドの混入がないため、それぞれ、相関が高く、類似のものとなる。
【0055】
特に、フレームF[C]のトップフィールドfC[t]に不適切なフィールドが混入している場合には、フレームF[C]のトップフィールドfC[t]と隣り合うフィールド(フレームF[B]のトップフィールドfB[t]とフレームF[C]のトップフィールドfC[t]、フレームF[C]のトップフィールドfC[t]とフレームF[D]のトップフィールドfD[t])はそれぞれ、相関が低く、非類似のものとなる。また、フレームF[C]のボトムフィールドfC[b]に不適切なフィールドが混入している場合には、フレームF[C]のボトムフィールドfC[b]と隣り合うフィールド(フレームF[B]のボトムフィールドfB[b]とフレームF[C]のボトムフィールドfC[b]、フレームF[C]のボトムフィールドfC[b]とフレームF[D]のボトムフィールドfD[b])はそれぞれ、相関が低く、非類似のものとなる。
【0056】
ノイズ検知部14のノイズ判定部23は、上述した特性を見ることにより、フレームF[C]に不適切なフィールドが混入しているか否かを判定する。ノイズ判定部23は、図2のステップS103、ステップS105、ステップS107、ステップS109でそれぞれ作成したヒストグラムに基づいて、上述した特性を見ることにより、フレームF[C]に不適切なフィールドが混入しているか否かを判定する。
【0057】
以下、具体的なノイズの判定処理について説明する。
【0058】
(ステップS121)
ノイズ判定部23は、フレームF[A]のトップフィールドfA[t]と、フレームF[B]のトップフィールドfB[t]とが類似であるか否かを判定する。この判定は、連続するフレームであるフレームF[A]のトップフィールドfA[t]とフレームF[B]のトップフィールドfB[t]との間に関して作成されたヒストグラムに基づいて行われる。ノイズ判定部23は、フレームF[A]のトップフィールドfA[t]と、フレームF[B]のトップフィールドfB[t]とが類似であると判定するとステップS122に進み、類似でないと判定すると後述するステップS126に進む。
【0059】
図5に、上述したヒストグラムの例を示す。図5のLAは、ヒストグラムの作成に用いたフィールド間の類似度が高い場合のヒストグラムの例を示し、図5のLBは、ヒストグラムの作成に用いたフィールド間の類似度が低い場合のヒストグラムの例を示す。ヒストグラムの作成に用いたフィールド間の類似度が高い場合には、図5のLAに示すように、差分値が0近傍の画素数が多く、ヒストグラムはカーブが急峻な形状となる。一方、ヒストグラムの作成に用いたフィールド間の類似度が低い場合には、図5のLBに示すように、差分値がばらつくため、ヒストグラムはカーブが緩やかな形状となる。
【0060】
ノイズ判定部23は、フレームF[A]のトップフィールドfA[t]と、フレームF[B]のトップフィールドfB[t]とが類似であるか否かを判定するために、ヒストグラムに複数の閾値を適用し、各閾値との比較を行うことによりヒストグラムの形状を推定し、推定結果に応じて上述の判定を行う。
【0061】
ノイズ判定部23は、まず、フレームF[A]のトップフィールドfA[t]とフレームF[B]のトップフィールドfB[t]との間に関して作成されたヒストグラムのうち、差分値が所定の範囲内(例えば、±20以内)の部分を処理対象として選択する。
【0062】
次に、ノイズ判定部23は、図6に示すように、ヒストグラムに対して4つの閾値(閾値Th1〜閾値Th4)を適用する。閾値Th1から閾値Th4は、それぞれ、予め定められた閾値であり、閾値Th1>閾値Th2>閾値Th3>閾値Th4の関係を有する。そして、ノイズ判定部23は、各閾値を超える画素数をそれぞれカウントする。すなわち、ノイズ判定部23は、閾値Th1を超える画素数N[Th1]、閾値Th2を超える画素数N[Th2]、閾値Th3を超える画素数N[Th3]、閾値Th4を超える画素数N[Th4]をそれぞれカウントする。
【0063】
ノイズ判定部23は、画素数N[Th1]、画素数N[Th2]、画素数N[Th3]、画素数N[Th4]が以下の(1)および(2)の条件を満たす場合には、ヒストグラムはカーブが急峻な形状であり、ヒストグラムの作成に用いたフィールド間の類似度が高いので、2つのフィールドは類似であると判定する。一方、以下の(1)および(2)の一方、または、両方の条件を満たさない場合には、ノイズ判定部23は、ヒストグラムはカーブが緩やかな形状であり、ヒストグラムの作成に用いたフィールド間の類似度が低いので、2つのフィールドは非類似である(類似でない)と判定する。
【0064】
(1)画素数N[Th1]、画素数N[Th2]、画素数N[Th3]、画素数N[Th4]が以下の3式の少なくとも1つを満たす。
【0065】
画素数N[Th1]×N>画素数N[Th2] ・・・(式1)
画素数N[Th2]×N>画素数N[Th3] ・・・(式2)
画素数N[Th3]×N>画素数N[Th4] ・・・(式3)
式1から式3中のNは所定の係数(例えば、N=2程度の値)であり、2種類の画素数の大小の判定を確実に行うための値が実験などにより求められる。例えば、この係数Nが1以下の値である場合、2種類の画素数の差が非常に小さい場合に大小関係が逆転してしまったり、差が非常に小さい場合でも各式を満たしてしまったりする可能性もあり、誤検出の可能性が高くなる。そのため、係数Nを適切に設定することにより、差がある程度明確である場合にのみ、各式を満たすようになり、誤検出の可能性が低くなる。
【0066】
上述した3式の少なくとも1つを満たす場合には、ヒストグラムはカーブが急峻な形状であると推定できる。
【0067】
(2)画素数N[Th4]が以下の式を満たす。
【0068】
画素数N[Th4]>閾値Th5 ・・・(式4)
ここで、画素数N[Th4]が閾値Th5よりも大きい場合とは、判定に用いられるヒストグラム(例えば、±20以内の部分)に、ある程度の母体数が存在する場合である。このような場合には、ヒストグラムに応じて、ヒストグラムの形状の適切な推定を行うことができると判定できる。
【0069】
一方、画素数N[Th4]が閾値Th5よりも小さい場合とは、判定に用いられるヒストグラム(例えば、±20以内の部分)に、十分な程度の母体数が存在しない場合である。このような場合には、ヒストグラムに応じて、ヒストグラムの形状の適切な推定を行うことができないと判定できる。
【0070】
なお、式4中の閾値Th5は予め定められた閾値であり、上述した判定に適した値が実験などにより求められる。
【0071】
ノイズ判定部23は、上述した一連の判定方法にしたがって、フレームF[A]のトップフィールドfA[t]と、フレームF[B]のトップフィールドfB[t]とが類似であるか否かを判定する。
【0072】
ここで、フレームF[A]のトップフィールドfA[t]と、フレームF[B]のトップフィールドfB[t]とが類似である場合には、図4で説明したように、フレームF[C]に不適切なフィールドが混入している可能性があると考えられる。ただし、単純にシーンが変わっている場合にも同じ結果となる場合があるため、その他の特性を見るために、ステップS122に進む。
【0073】
一方、フレームF[A]のトップフィールドfA[t]と、フレームF[B]のトップフィールドfB[t]とが類似でない場合には、フレームF[C]に不適切なフィールドが混入している可能性が低いと考えられるため、後述するステップS122からステップS125の処理を行わずにステップS129に進む。
【0074】
(ステップS122)
ノイズ判定部23は、フレームF[D]のトップフィールドfD[t]と、フレームF[E]のトップフィールドfE[t]とが類似であるか否かを判定する。この判定は、連続するフレームであるフレームF[D]とフレームF[E]との間に関して作成されたヒストグラムに基づいて、ステップS121と同様に行われる。ノイズ判定部23は、フレームF[D]のトップフィールドfD[t]と、フレームF[E]のトップフィールドfE[t]とが類似であると判定するとステップS123に進み、類似でないと判定すると後述するステップS126に進む。
【0075】
(ステップS123)
ノイズ判定部23は、フレームF[B]のトップフィールドfB[t]と、フレームF[C]のトップフィールドfC[t]とが非類似であるか否かを判定する。この判定は、連続するフレームであるフレームF[B]とフレームF[C]との間に関して作成されたヒストグラムに基づいて、ステップS121と同様に行われる。ノイズ判定部23は、フレームF[B]のトップフィールドfB[t]と、フレームF[C]のトップフィールドfC[t]とが非類似である(類似でない)と判定するとステップS124に進み、非類似でない(類似である)と判定すると後述するステップS126に進む。
【0076】
(ステップS124)
ノイズ判定部23は、フレームF[C]のトップフィールドfC[t]と、フレームF[D]のトップフィールドfD[t]とが非類似であるか否かを判定する。この判定は、連続するフレームであるフレームF[C]とフレームF[D]との間に関して作成されたヒストグラムに基づいて、ステップS121と同様に行われる。ノイズ判定部23は、フレームF[C]のトップフィールドfC[t]と、フレームF[D]のトップフィールドfD[t]とが非類似である(類似でない)と判定するとステップS125に進み、非類似でない(類似である)と判定すると後述するステップS126に進む。
【0077】
(ステップS125)
ノイズ判定部23は、フレームF[C]のトップフィールドfC[t]に不適切なフィールドが混入している、すなわち、フレームF[C]のトップフィールドfC[t]にノイズありと判定し、一連の処理を終了する。
【0078】
(ステップS126からステップS129)
ノイズ判定部23は、それぞれ、ステップS121からステップS124で説明した処理と同様の処理を行う。ただし、ステップS121からステップS124では、各フレームのトップフィールドを対象として行った各処理を、ステップS126からステップS129では、各フレームのボトムフィールドを対象として行う。
【0079】
(ステップS130)
ノイズ判定部23は、フレームF[C]のボトムフィールドfC[b]に不適切なフィールドが混入している、すなわち、フレームF[C]のボトムフィールドfC[b]にノイズありと判定し、一連の処理を終了する。
【0080】
(ステップS131)
ノイズ判定部23は、フレームF[C]のトップフィールドfC[t]にもボトムフィールドfC[b]にも不適切なフィールドが混入していない、すなわち、フレームF[C]にノイズなしと判定し、一連の処理を終了する。
【0081】
なお、以降のフレームにおけるノイズの判定も同様に行われる。例えば、フレームF[D]にノイズがあるか否かの判定は、フレームF[B]、フレームF[C]、フレームF[D]、フレームF[E]、フレームF[F]の間でそれぞれ作成したヒストグラムに基づいて行うことができる。このとき、フレームF[B]およびフレームF[C]の間のヒストグラム、フレームF[C]およびフレームF[D]の間のヒストグラム、フレームF[D]およびフレームF[E]の間のヒストグラムは、上述したフレームF[C]にノイズがあるか否かの判定時に既に求められている。したがって、既に求めた値等については繰り返し処理を行わず、前回の処理、演算結果を利用しても良い。
【0082】
以上説明した一連のノイズの検知の結果は、アラーム出力部16を介したユーザへの報知に用いられても良いし、入出力I/F17を介してノイズ検知装置11の外部に出力されても良い。また、対象動画像のタグ情報などに、検知したノイズの種類などを示す情報として記録しても良い。
【0083】
また、上述の例で説明した各処理は、ハードウエアで行っても良いし、CPU15によるソフトウェアで行っても良い。
【0084】
上記のように、本実施形態のノイズ検知装置は、複数のフレームからなる動画像を検知対象として、任意のフレームを構成するトップフィールドおよびボトムフィールドの少なくとも一方に、不適切なフィールドが混入しているか否かを検知するノイズ検知装置であって、処理の対象となる動画像を取得し、取得した動画像のうち、任意のフレームのトップフィールドと、任意のフレームと連続する少なくとも1つのフレームのトップフィールドとの間の相関を第1の相関として検出するとともに、任意のフレームのボトムフィールドと、任意のフレームと連続する少なくとも1つのフレームのボトムフィールドとの間の相関を第2の相関として検出する。そして、検出結果に基づいて第1の相関と第2の相関とを比較し、比較結果に基づいて、任意のフレームに不適切なフィールドが混入しているか否かの判定を行うものである。
【0085】
よって、本実施形態の構成によれば、動画像において、不適切なフィールドの混入によるノイズを、的確に自動で検知することができる。特に、本実施形態の構成によれば、フレームまたはフィールド単位で検知を行うことができるため、1フィールドの不適切なフィールドの混入による瞬間的なノイズも的確に自動で検知することができる。
【0086】
なお、上述した例では、ユーザによるプログラム実行指示に応じて、一連の処理を実行する例を示したが、本発明はこの例に限定されない。例えば、ノイズ検知装置11が何らかの動画像の画像データを読み込むたびに、自動で一連の処理を実行しても良い。
【0087】
<実施形態の補足事項>
(1)上記実施形態で説明した各閾値や係数などは一例であり本発明はこの例に限定されない。
【0088】
(2)上記実施形態のノイズ検知における差分値の算出方法やヒストグラムの作成方法は一例であり、本発明はこの例に限定されない。例えば、上記実施形態で説明した以外の方法で差分値を算出したり、ヒストグラムを作成したりして良い。また、差分値やヒストグラム以外のファクターを用いても良い。例えば、分散などの統計的な手法を用いても良い。
【0089】
さらに、上記実施形態では、フィールド同士の差分値を算出し、ヒストグラムを作成する例を示したが、本発明はこの例に限定されない。例えば、図7に示すように、隣り合うフレーム同士の差分値を算出し、ヒストグラムを作成して、フレーム単位で不適切なフィールド(フレーム)の混入を検知しても良い。
【0090】
また、上記実施形態では、隣り合うフレームのトップフィールド同士と、ボトムフィールド同士とで、それぞれ差分値を算出し、ヒストグラムを作成する例を示したが、本発明はこの例に限定されない。例えば、図8に示すように、読み出し順が隣り合うフィールド同士の差分値を算出し、ヒストグラムを作成して、フィールド単位で不適切なフィールドの混入を検知しても良い。図8の例では、図3のステップS121からステップS124において、それぞれ、フレームF[A]のトップフィールドfA[t]およびボトムフィールドfA[b]の類似性と、フレームF[A]のボトムフィールドfA[b]およびフレームF[B]のトップフィールドfB[t]の類似性と、F[B]のトップフィールドfB[t]およびボトムフィールドfB[b]の類似性と、フレームF[B]のボトムフィールドfB[b]およびフレームF[C]のトップフィールドfC[t]の類似性とを見ることにより、中央のフィールドであるフレームF[B]のトップフィールドfB[t]にノイズがあるか否かを判定することができる。
【0091】
(3)上記実施形態のノイズ検知における各判定の方法は一例であり、本発明はこの例に限定されない。例えば、図2および図3で説明した各処理の順番を適宜入れ替えても良い。
【0092】
(4)上記実施形態で示したノイズは一例であり、本発明はこの例に限定されない。例えば、上記実施形態の例では、不適切なフィールドが1フィールド、または、2フィールド単位で混入する前提で説明を行ったが、不適切なフィールドが3フィールド以上の数フィールドに渡って混入するノイズについても、本発明を同様に適用することができる。
【0093】
(5)上記実施形態で説明したノイズ検知装置による処理を実行するノイズ検知プログラムも本発明の具体的態様として有効である。このノイズ検知プログラムは、磁気ディスクなどの記憶媒体に記憶されたものであっても良いし、インターネットなどを介してダウンロード可能なものであっても良い。また、上記実施形態で説明したノイズ検知装置を備えた画像処理装置、撮像装置や再生装置(例えば、フォトビューアー、デジタルフォトフレーム、各種印刷装置など)も本発明の具体的態様として有効である。上述した再生装置においては、画像の再生を行う際に一連の処理を実行する構成としても良い。
【0094】
以上の詳細な説明により、実施形態の特徴点および利点は明らかになるであろう。これは、特許請求の範囲が、その精神および権利範囲を逸脱しない範囲で前述のような実施形態の特徴点および利点にまで及ぶことを意図する。また、当該技術分野において通常の知識を有する者であれば、あらゆる改良および変更に容易に想到できるはずであり、発明性を有する実施形態の範囲を前述したものに限定する意図はなく、実施形態に開示された範囲に含まれる適当な改良物および均等物によることも可能である。
【符号の説明】
【0095】
11…ノイズ検知装置、14…ノイズ検知部、15…CPU、21…差分算出部、22…ヒストグラム作成部、23…ノイズ判定部
【特許請求の範囲】
【請求項1】
複数のフレームからなる動画像を検知対象として、任意のフレームを構成するトップフィールドおよびボトムフィールドの少なくとも一方に、不適切なフィールドが混入しているか否かを検知するノイズ検知装置であって、
処理の対象となる前記動画像を取得する取得部と、
前記動画像のうち、任意のフレームの前記トップフィールドと、前記任意のフレームと連続する少なくとも1つのフレームの前記トップフィールドとの間の相関を第1の相関として検出するとともに、前記任意のフレームの前記ボトムフィールドと、前記任意のフレームと連続する少なくとも1つのフレームの前記ボトムフィールドとの間の相関を第2の相関として検出する検出部と、
前記検出部による検出結果に基づいて前記第1の相関と前記第2の相関とを比較し、比較結果に基づいて、前記任意のフレームに前記不適切なフィールドが混入しているか否かの判定を行う判定部と
を備えることを特徴とするノイズ検知装置。
【請求項2】
請求項1に記載のノイズ検知装置において、
前記任意のフレームを第nフレームとすると、
前記検出部は、前記第nフレームと第(n−1)フレームとの間の前記第1の相関および前記第2の相関と、前記第(n−1)フレームと第(n−2)フレームとの間の前記第1の相関および前記第2の相関と、前記第nフレームと前記第(n+1)フレームとの間の前記第1の相関および前記第2の相関と、前記第(n+1)フレームと第(n+2)フレームとの間の前記第1の相関および前記第2の相関とを検出し、
前記判定部は、前記第nフレームと前記第(n−1)フレームとの間で検出した前記第1の相関および前記第2の相関の比較と、前記第(n−1)フレームと前記第(n−2)フレームとの間で検出した前記第1の相関および前記第2の相関の比較と、前記第nフレームと前記第(n+1)フレームとの間で検出した前記第1の相関および前記第2の相関の比較と、前記第(n+1)フレームと前記第(n+2)フレームとの間で検出した前記第1の相関および前記第2の相関の比較とを行い、それぞれの比較結果に基づいて前記判定を行う
ことを特徴とするノイズ検知装置。
【請求項3】
請求項2に記載のノイズ検知装置において、
前記判定部は、各比較結果に基づいて2つのフレームの類似度を求め、前記第nフレームおよび前記第(n−1)フレームの間の類似度と、前記第nフレームおよび前記第(n+1)フレームの間の類似度とが所定の第1の閾値より低く、前記第(n−1)フレームおよび前記第(n−2)フレームの間の類似度と、前記第(n+1)フレームおよび前記第(n+2)フレームの間の類似度とが所定の第2の閾値よりも高い場合に、前記第nフレームに前記不適切なフィールドが混入していると判定する
ことを特徴とするノイズ検知装置。
【請求項4】
請求項1に記載のノイズ検知装置において、
前記検出部は、前記第1の相関および前記第2の相関を求める際に、2つのフィールドに含まれる画素の画素値の差分値を求め、求めた前記差分値に基づいてヒストグラムを作成し、作成した前記ヒストグラムに基づいて、前記第1の相関および前記第2の相関を検出する
ことを特徴とするノイズ検知装置。
【請求項5】
複数のフレームからなる動画像を検知対象として、任意のフレームを構成するトップフィールドおよびボトムフィールドの何れかに、不適切なフィールドが混入しているか否かを検知するノイズ検知装置であって、
処理の対象となる前記動画像を取得する取得部と、
前記動画像のうち、任意のフレームの前記トップフィールドおよび前記ボトムフィールドの何れかを第nフィールドとし、前記第nフィールドと読み出し順が前後にそれぞれ連続するフィールドを第(n−1)フィールドおよび第(n+1)フィールドとして、前記第nフィールドと前記第(n−1)フィールドとの間の相関と、前記第(n−1)フィールドと第(n−2)フィールドとの間の相関と、前記第nフィールドと前記第(n+1)フィールドとの間の相関と、前記第(n+1)フィールドと第(n+2)フィールドとの間の相関とを検出する検出部と、
前記検出部による検出結果に基づいて4つの相関を相互に比較し、比較結果に基づいて、前記第nフィールドに前記不適切なフィールドが混入しているか否かの判定を行う判定部と
を備えることを特徴とするノイズ検知装置。
【請求項6】
動画像を記録する記録部と、
前記動画像を再生する再生部と、
請求項1から請求項5の何れか1項に記載のノイズ検知装置とを備え、
前記取得部は、処理の対象となる前記動画像を前記記録部から取得する
ことを特徴とする再生装置。
【請求項7】
複数のフレームからなる動画像を検知対象として、任意のフレームを構成するトップフィールドおよびボトムフィールドの少なくとも一方に、不適切なフィールドが混入しているか否かを検知するノイズ検知処理をコンピュータに実行させるノイズ検知プログラムであって、
処理の対象となる前記動画像を取得する取得ステップと、
前記動画像のうち、任意のフレームの前記トップフィールドと、前記任意のフレームと連続する少なくとも1つのフレームの前記トップフィールドとの間の相関を第1の相関として検出するとともに、前記任意のフレームの前記ボトムフィールドと、前記任意のフレームと連続する少なくとも1つのフレームの前記ボトムフィールドとの間の相関を第2の相関として検出する検出ステップと、
前記検出ステップにおける検出結果に基づいて前記第1の相関と前記第2の相関とを比較し、比較結果に基づいて、前記任意のフレームに前記不適切なフィールドが混入しているか否かの判定を行う判定ステップと
を備えることを特徴とするノイズ検知プログラム。
【請求項1】
複数のフレームからなる動画像を検知対象として、任意のフレームを構成するトップフィールドおよびボトムフィールドの少なくとも一方に、不適切なフィールドが混入しているか否かを検知するノイズ検知装置であって、
処理の対象となる前記動画像を取得する取得部と、
前記動画像のうち、任意のフレームの前記トップフィールドと、前記任意のフレームと連続する少なくとも1つのフレームの前記トップフィールドとの間の相関を第1の相関として検出するとともに、前記任意のフレームの前記ボトムフィールドと、前記任意のフレームと連続する少なくとも1つのフレームの前記ボトムフィールドとの間の相関を第2の相関として検出する検出部と、
前記検出部による検出結果に基づいて前記第1の相関と前記第2の相関とを比較し、比較結果に基づいて、前記任意のフレームに前記不適切なフィールドが混入しているか否かの判定を行う判定部と
を備えることを特徴とするノイズ検知装置。
【請求項2】
請求項1に記載のノイズ検知装置において、
前記任意のフレームを第nフレームとすると、
前記検出部は、前記第nフレームと第(n−1)フレームとの間の前記第1の相関および前記第2の相関と、前記第(n−1)フレームと第(n−2)フレームとの間の前記第1の相関および前記第2の相関と、前記第nフレームと前記第(n+1)フレームとの間の前記第1の相関および前記第2の相関と、前記第(n+1)フレームと第(n+2)フレームとの間の前記第1の相関および前記第2の相関とを検出し、
前記判定部は、前記第nフレームと前記第(n−1)フレームとの間で検出した前記第1の相関および前記第2の相関の比較と、前記第(n−1)フレームと前記第(n−2)フレームとの間で検出した前記第1の相関および前記第2の相関の比較と、前記第nフレームと前記第(n+1)フレームとの間で検出した前記第1の相関および前記第2の相関の比較と、前記第(n+1)フレームと前記第(n+2)フレームとの間で検出した前記第1の相関および前記第2の相関の比較とを行い、それぞれの比較結果に基づいて前記判定を行う
ことを特徴とするノイズ検知装置。
【請求項3】
請求項2に記載のノイズ検知装置において、
前記判定部は、各比較結果に基づいて2つのフレームの類似度を求め、前記第nフレームおよび前記第(n−1)フレームの間の類似度と、前記第nフレームおよび前記第(n+1)フレームの間の類似度とが所定の第1の閾値より低く、前記第(n−1)フレームおよび前記第(n−2)フレームの間の類似度と、前記第(n+1)フレームおよび前記第(n+2)フレームの間の類似度とが所定の第2の閾値よりも高い場合に、前記第nフレームに前記不適切なフィールドが混入していると判定する
ことを特徴とするノイズ検知装置。
【請求項4】
請求項1に記載のノイズ検知装置において、
前記検出部は、前記第1の相関および前記第2の相関を求める際に、2つのフィールドに含まれる画素の画素値の差分値を求め、求めた前記差分値に基づいてヒストグラムを作成し、作成した前記ヒストグラムに基づいて、前記第1の相関および前記第2の相関を検出する
ことを特徴とするノイズ検知装置。
【請求項5】
複数のフレームからなる動画像を検知対象として、任意のフレームを構成するトップフィールドおよびボトムフィールドの何れかに、不適切なフィールドが混入しているか否かを検知するノイズ検知装置であって、
処理の対象となる前記動画像を取得する取得部と、
前記動画像のうち、任意のフレームの前記トップフィールドおよび前記ボトムフィールドの何れかを第nフィールドとし、前記第nフィールドと読み出し順が前後にそれぞれ連続するフィールドを第(n−1)フィールドおよび第(n+1)フィールドとして、前記第nフィールドと前記第(n−1)フィールドとの間の相関と、前記第(n−1)フィールドと第(n−2)フィールドとの間の相関と、前記第nフィールドと前記第(n+1)フィールドとの間の相関と、前記第(n+1)フィールドと第(n+2)フィールドとの間の相関とを検出する検出部と、
前記検出部による検出結果に基づいて4つの相関を相互に比較し、比較結果に基づいて、前記第nフィールドに前記不適切なフィールドが混入しているか否かの判定を行う判定部と
を備えることを特徴とするノイズ検知装置。
【請求項6】
動画像を記録する記録部と、
前記動画像を再生する再生部と、
請求項1から請求項5の何れか1項に記載のノイズ検知装置とを備え、
前記取得部は、処理の対象となる前記動画像を前記記録部から取得する
ことを特徴とする再生装置。
【請求項7】
複数のフレームからなる動画像を検知対象として、任意のフレームを構成するトップフィールドおよびボトムフィールドの少なくとも一方に、不適切なフィールドが混入しているか否かを検知するノイズ検知処理をコンピュータに実行させるノイズ検知プログラムであって、
処理の対象となる前記動画像を取得する取得ステップと、
前記動画像のうち、任意のフレームの前記トップフィールドと、前記任意のフレームと連続する少なくとも1つのフレームの前記トップフィールドとの間の相関を第1の相関として検出するとともに、前記任意のフレームの前記ボトムフィールドと、前記任意のフレームと連続する少なくとも1つのフレームの前記ボトムフィールドとの間の相関を第2の相関として検出する検出ステップと、
前記検出ステップにおける検出結果に基づいて前記第1の相関と前記第2の相関とを比較し、比較結果に基づいて、前記任意のフレームに前記不適切なフィールドが混入しているか否かの判定を行う判定ステップと
を備えることを特徴とするノイズ検知プログラム。
【図1】



【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−46155(P2013−46155A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−181617(P2011−181617)
【出願日】平成23年8月23日(2011.8.23)
【出願人】(592217093)株式会社ニコンシステム (102)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月23日(2011.8.23)
【出願人】(592217093)株式会社ニコンシステム (102)
【Fターム(参考)】
[ Back to top ]