
レーダ装置及び監視方法
【課題】航空機の予測位置を正確に特定し、捕捉する。
【解決手段】モードS二次監視レーダは、航空機データ記憶部と、質問生成部と、算出部と、更新部とを備える。航空機データ記憶部は、次のスキャンにおける航空機の位置情報である予測位置を含む航空機データを記憶する。質問生成部は、ロールコール期間において、航空機データに含まれる航空機に対し、ロールコール質問又は航空機に搭載されるトランスポンダのGICBレジスタのパラメータを含む応答の送信を要求する要求信号を生成し送信手段に出力する。算出部は、受信手段がロールコール質問に対して受信した応答に含まれる航空機の位置又はGICBレジスタのパラメータに含まれる航空機の動態情報から当該航空機の予測位置を算出する。更新部は、算出部で算出された予測位置で航空機データを更新する。
【解決手段】モードS二次監視レーダは、航空機データ記憶部と、質問生成部と、算出部と、更新部とを備える。航空機データ記憶部は、次のスキャンにおける航空機の位置情報である予測位置を含む航空機データを記憶する。質問生成部は、ロールコール期間において、航空機データに含まれる航空機に対し、ロールコール質問又は航空機に搭載されるトランスポンダのGICBレジスタのパラメータを含む応答の送信を要求する要求信号を生成し送信手段に出力する。算出部は、受信手段がロールコール質問に対して受信した応答に含まれる航空機の位置又はGICBレジスタのパラメータに含まれる航空機の動態情報から当該航空機の予測位置を算出する。更新部は、算出部で算出された予測位置で航空機データを更新する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、航空機の飛行を監視するレーダ装置及び監視方法に関する。
【背景技術】
【0002】
航空機の飛行の監視には、モードS二次監視レーダ(SSRモードS:Secondary Surveillance Radar Mode S)等のレーダ装置が利用される。モードS二次監視レーダは、航空機に搭載されているトランスポンダに質問信号を送信し、トランスポンダから送信される応答信号を受信し、解析して航空機を監視する。
【0003】
トランスポンダには、処理や送受信する信号が異なるモードSトランスポンダとATCRBSトランスポンダとがある。したがって、モードS二次監視レーダは、オールコール期間とロールコール期間とを設定し、各トランスポンダを備える航空機を監視する。具体的には、オールコール期間には、モードSトランスポンダを搭載する航空機に対するモードS一括質問とATCRBSトランスポンダを備える航空機に対するATCRBS一括質問とを送信し、各質問に対する応答を受信する。また、モードS二次監視レーダは、ロールコール期間には、オールコール期間で捕捉したモードSトランスポンダを搭載する航空機にモードS個別質問を送信し、この質問に対するモードS応答を受信する。
【0004】
オールコール期間において、モードS二次監視レーダでは、応答が到来する方位角と応答に含まれる高度情報から、監視する航空機の予測位置を算出している。また、モードS二次監視レーダでは、算出した予測位置から各航空機に対して質問の送信及び応答の受信のスケジュールを決定している。しかしながら、測角精度は電波状況やモードS二次監視レーダからの航空機の方位及び距離に影響を受け、予測位置を精度良く求めることができない場合があり、ロールコール期間における航空機の捕捉が中断するおそれがある。
【0005】
これに対し、モードS二次監視レーダでは、航空機を精度良く求める方法として、航空機のトランスポンダが有するGICBレジスタのパラメータを取得し、このパラメータに含まれる動態情報(磁方位、速度、昇降率)を利用することができる。GICBレジスタのパラメータを利用した場合、モードS応答に含まれる位置情報よりも正確な位置情報を取得することができる。
【0006】
一方、GICBレジスタのパラメータの要求に対する応答は、ロング応答であり、通常のモードS個別質問の応答であるショート応答よりもデータサイズが大きいため、スケジュールにおいて応答の受信時間を長く設定する必要がある。そのため、GICBレジスタのパラメータの取得を多用した場合、モードS二次監視レーダにおいてビームスケジュールが圧迫され、捕捉することができない航空機が発生するおそれがある。
【先行技術文献】
【非特許文献】
【0007】
【非特許文献1】Michael C. Stevens “Secondary Surveillance Radar” 1988, ISBN 0-89006-292-7
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述したように、従来のモードS二次監視レーダでは、ロールコール期間においてモードS応答を利用した場合には航空機の予測位置を正確に算出できず、航空機の捕捉が困難なおそれがあった。また、GICBパラメータを取得した場合には、ビームスケジュールが圧迫されて捕捉していた航空機全ての捕捉が困難になるおそれがあった。
【0009】
従って実施形態によれば、航空機の予測位置を正確に特定し、捕捉することのできるレーダ装置及び監視方法を提供する。
【課題を解決するための手段】
【0010】
実施形態のレーダ装置は、モードS二次監視レーダは、航空機データ記憶部と、質問生成部と、算出部と、更新部とを備える。航空機データ記憶部は、次のスキャンにおける航空機の位置情報である予測位置を含む航空機データを記憶する。質問生成部は、ロールコール期間において、航空機データに含まれる航空機に対し、ロールコール質問又は航空機に搭載されるトランスポンダのGICBレジスタのパラメータを含む応答の送信を要求する要求信号を生成し送信手段に出力する。算出部は、受信手段がロールコール質問に対して受信した応答に含まれる航空機の位置又はGICBレジスタのパラメータに含まれる航空機の動態情報から当該航空機の予測位置を算出する。更新部は、算出部で算出された予測位置で航空機データを更新する。
【図面の簡単な説明】
【0011】
【図1】実施形態に係るモードS二次監視レーダの構成を説明する機能ブロック図である。
【図2】図1のモードS二次監視レーダで送受信する信号を説明する図である。
【図3】図1のモードS二次監視レーダでの予測位置特定方法について説明するフローチャートである。
【発明を実施するための形態】
【0012】
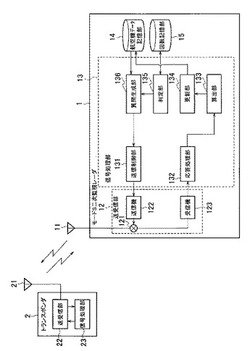
図1を用いて実施形態に係るモードS二次監視レーダ1について説明する。モードS二次監視レーダ1は、地上局に設置されており、航空機に備えられるトランスポンダ2との質問応答に基づいて航空機の飛行を監視する装置である。このモードS二次監視レーダ1では、オールコール期間に一括質問を送信し、ロールコール期間に個別質問を送信し、一括質問及び個別質問からそれぞれ受信する応答を利用して航空機の飛行を監視する。
【0013】
このモードS二次監視レーダ1では、ロールコール期間においてモードS個別質問を送信する際に、定期的にモードS個別質問(監視用)の代わりにGICBレジスタのパラメータの要求信号(GICB要求信号)を送信し、ここで取得したGICBレジスタのパラメータを利用して正確な航空機の予測位置を求めて航空機の捕捉を継続する。
【0014】
なお、オールコール期間における処理についてはオールコール質問の送信及びロールコール応答の受信と、受信した応答の解析であって、従来の処理と同一であるため、以下では、オールコール期間における処理については説明を省略し、ロールコール期間における処理について説明する。
【0015】
図1に示すように、モードS二次監視レーダ1は、アンテナ11と、アンテナ11を介して信号を送受信する送受信部12と、送受信部12に接続され、質問応答を制御するとともに受信する応答を処理する信号処理部13と、監視対象の航空機に関する航空機データを記憶する航空機データ記憶部14と、信号処理部13が利用する回数データを記憶する回数記憶部15を備えている。
【0016】
送受信部12は、送受切替器121、送信器122及び受信器123を有し、アンテナ11を介して質問(質問信号)を送信するとともに、アンテナ11で受信する応答(応答信号)を信号処理部13に出力している。
【0017】
信号処理部13は、質問の送信を制御する送信制御部131、受信した応答を処理する応答処理部132、次のスキャン時に航空機が存在する予測位置を算出する算出部133、新たな予測位置で航空機データを更新する更新部134、GICB要求信号を送信するタイミングを判定する判定部135及び送信する質問を生成する質問生成部136とを備えている。
【0018】
具体的には、送信制御部131は、質問生成部136から入力する信号を送受信部12に出力し、送信器122にアンテナ11を介して送信させる。
【0019】
応答処理部132は、送受信部12がアンテナ11を介して受信した信号を入力すると、入力した信号を解析して信号に含まれるモードSアドレスが送信した質問に含まれるモードSアドレスと一致する信号を送信制御部131が送信した質問に対する応答として選択する。応答処理部132は、モードSアドレスが一致しない信号を質問に対する応答でないとして破棄する。
【0020】
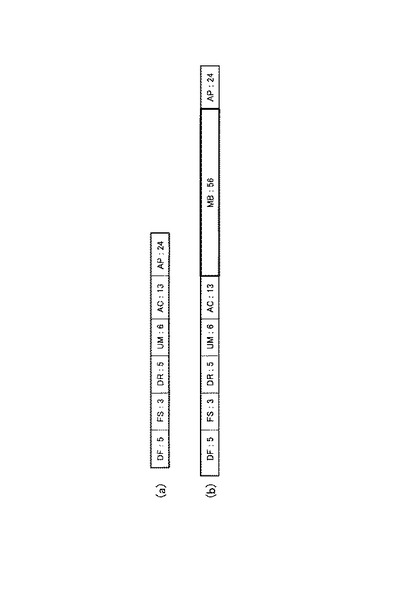
また、応答処理部132は、受信した応答がショート応答(通常のロールコール応答)であるかロング応答(GICB要求信号に対して送信されたGICBレジスタのパラメータを含む応答(GICB応答))であるかを判定する。具体的には、ショート応答とは、図2(a)に示すような、5ビットのDFフィールド、3ビットのFSフィールド、5ビットのDRフィールド、6ビットのUMフィールド、13ビットのACフィールド及び24ビットのAPフィールドを有する56ビットのデータである。ロング応答は、図2(b)に示すような、ショート応答で含むデータに加え、56ビットのMBフィールドを有する112ビットの応答である。
【0021】
算出部133は、応答処理部132でショート応答であると判定されたとき、ショート応答から航空機の方位、高度及び距離を抽出し、抽出した方位、高度及び距離を利用して航空機が次のスキャン時に存在すると予測される位置(予測位置)を算出する。また、算出部133は、ロング応答であると判定されたとき、ロング応答から航空機の動態情報(磁方位、速度、昇降率)を抽出して航空機の予測位置を算出する。算出部133は、算出した予測位置を更新部134に出力する。予測位置の算出方法は、一般的に利用されている方法である。
【0022】
更新部134は、算出部133で算出された予測位置を利用して航空機データ記憶部14で記憶される航空機データを更新する。
【0023】
航空機データ記憶部14が記憶する航空機データは、例えば、応答から解析された航空機の識別子及び位置情報の他、算出部133で算出された予測位置、応答の受信時刻等を含んでいる。
【0024】
判定部135は、航空機に質問を送信する際に、回数記憶部15で記憶される質問の送信回数に応じて、GICBレジスタのパラメータの取得タイミング(GICB要求信号の送信のタイミング)であるか否かを判定し、判定結果を質問生成部136に出力する。
【0025】
回数記憶部15が記憶する回数データは、航空機の識別子と、識別子で識別される航空機がGICB要求信号を送信後に通常のロールコール質問を送信した回数とを関連付けている。
【0026】
具体的には、回数データで質問を送信する航空機の識別子と関連づけられる値が、所定の値以上であるとき、判定部135は、GICB要求信号を送信するタイミングであると判定する。また、判定部135は、GICB要求信号を送信するタイミングであると判定したとき、回数記憶部15の回数データで当該航空機の識別子と関連づけられる回数を0にリセットする。
【0027】
一方、回数データで質問を送信する航空機の識別子と関連づけられる値が、所定の値以上でないとき、判定部135は、GICB要求信号ではなく、通常のロールコール質問を送信するタイミングであると判定する。また、このとき判定部135は、回数記憶部15の回数データで当該航空機の識別子と関連づけられる回数をインクリメントする。
【0028】
すなわち、判定部135は、回数記憶部15に各航空機航空機にロールコール質問を送信した回数を記憶し、ある航空機にGICB要求信号を送信したとき、この航空機について回数記憶部15で記憶している回数をリセットする。
【0029】
判定部135におけるGICB要求信号の送信タイミングとして設定される回数が10回に設定されている場合、モードS二次監視レーダ1では、前回GICB要求信号を送信後にロールコール質問を連続して10回送信すると、11回目はロールコール質問ではなくGICBレジスタ要求信号を送信する。ここで、設定する値を小さくすると、航空機の捕捉精度が向上するが、モードS二次監視レーダ1がロング応答を受信する回数が多くなってスケジュールの設定が困難になる。一方、設定する値を大きくすると、スケジュールの設定は容易になるが、GICBレジスタのパラメータを使用する回数が少なくなるため、航空機の捕捉精度が低下する。
【0030】
質問生成部136は、判定部135の判定結果に応じて質問を生成し、送信制御部131に出力する。具体的には、判定部135でGICB要求信号を送信するタイミングであると判定された場合、質問生成部136は、GICB要求信号を生成する。また、判定部135で通常のロールコール質問を送信するタイミングであると判定された場合、質問生成部136は、ロールコール質問を生成する。
【0031】
続いて、図3に示すフローチャートを用いてモードS二次監視レーダ1におけるロールコール期間における処理の流れを説明する。
【0032】
モードS二次監視レーダ1では、ロールコール期間には、判定部135は、GICB要求信号の送信タイミングであるか否かを判定する(S1)。
【0033】
判定部135にGICB要求信号の送信タイミングでないと判定された場合(S1でNO)、質問生成部136は、通常のロールコール質問を生成する(S2)。一方、判定部135にGICB要求信号の送信タイミングであると判定された場合(S1でYES)、質問生成部136は、GICB要求信号を生成する(S3)。
【0034】
その後、送信制御部131は、ステップS2又はS3で質問生成部136が生成した信号を送信する(S4)。
【0035】
応答処理部132は、ステップS4で送信制御部131が送信した信号に応答する信号を受信すると(S5)、信号に含まれるモードSアドレスが受信を予測していたモードSアドレスと一致するか否かを判定する(S6)。ここで、モードSアドレスが一致しないとき(S6でNO)、応答処理部132は、不要な信号であるため破棄するが(S7)、モードSアドレスが一致するとき(S6でYES)、応答処理部132は、送信制御部131が送信した質問に対する応答であるとして、ショート応答であるか否かを判定する(S8)。
【0036】
ショート応答であると判定した場合(S8でYES)、応答処理部132は、信号に含まれる方位、高度及び距離を算出部133に出力する(S9)。算出部133は、ステップS4で入力した方位、高度及び距離を利用して、航空機の予測位置を算出する(S10)。その後、更新部134は、ステップS5で算出した予測位置を利用して航空機データ記憶部14の航空機データを更新し(S11)、ステップS1の処理に戻る。
【0037】
一方、ショート応答でなくロング応答であると判定した場合(S8でNO)、応答処理部132は、信号に含まれる動態情報を算出部133に出力する(S12)。算出部133は、ステップS12で入力した動態情報を利用して、次のスキャン時における航空機の予測位置を算出する(S13)。その後、更新部134は、ステップS13で算出した予測位置を利用して航空機データ記憶部14の航空機データを更新し(S14)、ステップS1の処理に戻る。
【0038】
上述したように、実施形態に係るモードS二次監視レーダでは、ロールコール質問の送信時に、通常のロールコール質問の他、GICB要求信号を送信してGICBレジスタのパラメータを取得することで航空機の正確な位置を取得する。また、モードS二次監視レーダでは、GICBレジスタのパラメータから取得した航空機の正確な位置を利用して、予測位置を正確に求めることができるため、航空機との質問応答を確実にし、航空機の捕捉の継続が可能になる。
【0039】
上記のように、本発明を実施形態によって記載したが、この開示の一部をなす論述および図面はこの発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施形態、実施例および運用技術が明らかとなる。また、本発明はここでは記載していない様々な実施形態等を含むことは勿論である。
【符号の説明】
【0040】
1…二次監視レーダ
11…アンテナ
12…送受信部
121…送受切替器
122…送信器
123…受信器
13…信号処理部
131…送信制御部
132…応答処理部
133…算出部
134…更新部
135…判定部
136…質問生成部
14…航空機データ記憶部
15…回数記憶部
2…トランスポンダ
【技術分野】
【0001】
本発明の実施形態は、航空機の飛行を監視するレーダ装置及び監視方法に関する。
【背景技術】
【0002】
航空機の飛行の監視には、モードS二次監視レーダ(SSRモードS:Secondary Surveillance Radar Mode S)等のレーダ装置が利用される。モードS二次監視レーダは、航空機に搭載されているトランスポンダに質問信号を送信し、トランスポンダから送信される応答信号を受信し、解析して航空機を監視する。
【0003】
トランスポンダには、処理や送受信する信号が異なるモードSトランスポンダとATCRBSトランスポンダとがある。したがって、モードS二次監視レーダは、オールコール期間とロールコール期間とを設定し、各トランスポンダを備える航空機を監視する。具体的には、オールコール期間には、モードSトランスポンダを搭載する航空機に対するモードS一括質問とATCRBSトランスポンダを備える航空機に対するATCRBS一括質問とを送信し、各質問に対する応答を受信する。また、モードS二次監視レーダは、ロールコール期間には、オールコール期間で捕捉したモードSトランスポンダを搭載する航空機にモードS個別質問を送信し、この質問に対するモードS応答を受信する。
【0004】
オールコール期間において、モードS二次監視レーダでは、応答が到来する方位角と応答に含まれる高度情報から、監視する航空機の予測位置を算出している。また、モードS二次監視レーダでは、算出した予測位置から各航空機に対して質問の送信及び応答の受信のスケジュールを決定している。しかしながら、測角精度は電波状況やモードS二次監視レーダからの航空機の方位及び距離に影響を受け、予測位置を精度良く求めることができない場合があり、ロールコール期間における航空機の捕捉が中断するおそれがある。
【0005】
これに対し、モードS二次監視レーダでは、航空機を精度良く求める方法として、航空機のトランスポンダが有するGICBレジスタのパラメータを取得し、このパラメータに含まれる動態情報(磁方位、速度、昇降率)を利用することができる。GICBレジスタのパラメータを利用した場合、モードS応答に含まれる位置情報よりも正確な位置情報を取得することができる。
【0006】
一方、GICBレジスタのパラメータの要求に対する応答は、ロング応答であり、通常のモードS個別質問の応答であるショート応答よりもデータサイズが大きいため、スケジュールにおいて応答の受信時間を長く設定する必要がある。そのため、GICBレジスタのパラメータの取得を多用した場合、モードS二次監視レーダにおいてビームスケジュールが圧迫され、捕捉することができない航空機が発生するおそれがある。
【先行技術文献】
【非特許文献】
【0007】
【非特許文献1】Michael C. Stevens “Secondary Surveillance Radar” 1988, ISBN 0-89006-292-7
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述したように、従来のモードS二次監視レーダでは、ロールコール期間においてモードS応答を利用した場合には航空機の予測位置を正確に算出できず、航空機の捕捉が困難なおそれがあった。また、GICBパラメータを取得した場合には、ビームスケジュールが圧迫されて捕捉していた航空機全ての捕捉が困難になるおそれがあった。
【0009】
従って実施形態によれば、航空機の予測位置を正確に特定し、捕捉することのできるレーダ装置及び監視方法を提供する。
【課題を解決するための手段】
【0010】
実施形態のレーダ装置は、モードS二次監視レーダは、航空機データ記憶部と、質問生成部と、算出部と、更新部とを備える。航空機データ記憶部は、次のスキャンにおける航空機の位置情報である予測位置を含む航空機データを記憶する。質問生成部は、ロールコール期間において、航空機データに含まれる航空機に対し、ロールコール質問又は航空機に搭載されるトランスポンダのGICBレジスタのパラメータを含む応答の送信を要求する要求信号を生成し送信手段に出力する。算出部は、受信手段がロールコール質問に対して受信した応答に含まれる航空機の位置又はGICBレジスタのパラメータに含まれる航空機の動態情報から当該航空機の予測位置を算出する。更新部は、算出部で算出された予測位置で航空機データを更新する。
【図面の簡単な説明】
【0011】
【図1】実施形態に係るモードS二次監視レーダの構成を説明する機能ブロック図である。
【図2】図1のモードS二次監視レーダで送受信する信号を説明する図である。
【図3】図1のモードS二次監視レーダでの予測位置特定方法について説明するフローチャートである。
【発明を実施するための形態】
【0012】
図1を用いて実施形態に係るモードS二次監視レーダ1について説明する。モードS二次監視レーダ1は、地上局に設置されており、航空機に備えられるトランスポンダ2との質問応答に基づいて航空機の飛行を監視する装置である。このモードS二次監視レーダ1では、オールコール期間に一括質問を送信し、ロールコール期間に個別質問を送信し、一括質問及び個別質問からそれぞれ受信する応答を利用して航空機の飛行を監視する。
【0013】
このモードS二次監視レーダ1では、ロールコール期間においてモードS個別質問を送信する際に、定期的にモードS個別質問(監視用)の代わりにGICBレジスタのパラメータの要求信号(GICB要求信号)を送信し、ここで取得したGICBレジスタのパラメータを利用して正確な航空機の予測位置を求めて航空機の捕捉を継続する。
【0014】
なお、オールコール期間における処理についてはオールコール質問の送信及びロールコール応答の受信と、受信した応答の解析であって、従来の処理と同一であるため、以下では、オールコール期間における処理については説明を省略し、ロールコール期間における処理について説明する。
【0015】
図1に示すように、モードS二次監視レーダ1は、アンテナ11と、アンテナ11を介して信号を送受信する送受信部12と、送受信部12に接続され、質問応答を制御するとともに受信する応答を処理する信号処理部13と、監視対象の航空機に関する航空機データを記憶する航空機データ記憶部14と、信号処理部13が利用する回数データを記憶する回数記憶部15を備えている。
【0016】
送受信部12は、送受切替器121、送信器122及び受信器123を有し、アンテナ11を介して質問(質問信号)を送信するとともに、アンテナ11で受信する応答(応答信号)を信号処理部13に出力している。
【0017】
信号処理部13は、質問の送信を制御する送信制御部131、受信した応答を処理する応答処理部132、次のスキャン時に航空機が存在する予測位置を算出する算出部133、新たな予測位置で航空機データを更新する更新部134、GICB要求信号を送信するタイミングを判定する判定部135及び送信する質問を生成する質問生成部136とを備えている。
【0018】
具体的には、送信制御部131は、質問生成部136から入力する信号を送受信部12に出力し、送信器122にアンテナ11を介して送信させる。
【0019】
応答処理部132は、送受信部12がアンテナ11を介して受信した信号を入力すると、入力した信号を解析して信号に含まれるモードSアドレスが送信した質問に含まれるモードSアドレスと一致する信号を送信制御部131が送信した質問に対する応答として選択する。応答処理部132は、モードSアドレスが一致しない信号を質問に対する応答でないとして破棄する。
【0020】
また、応答処理部132は、受信した応答がショート応答(通常のロールコール応答)であるかロング応答(GICB要求信号に対して送信されたGICBレジスタのパラメータを含む応答(GICB応答))であるかを判定する。具体的には、ショート応答とは、図2(a)に示すような、5ビットのDFフィールド、3ビットのFSフィールド、5ビットのDRフィールド、6ビットのUMフィールド、13ビットのACフィールド及び24ビットのAPフィールドを有する56ビットのデータである。ロング応答は、図2(b)に示すような、ショート応答で含むデータに加え、56ビットのMBフィールドを有する112ビットの応答である。
【0021】
算出部133は、応答処理部132でショート応答であると判定されたとき、ショート応答から航空機の方位、高度及び距離を抽出し、抽出した方位、高度及び距離を利用して航空機が次のスキャン時に存在すると予測される位置(予測位置)を算出する。また、算出部133は、ロング応答であると判定されたとき、ロング応答から航空機の動態情報(磁方位、速度、昇降率)を抽出して航空機の予測位置を算出する。算出部133は、算出した予測位置を更新部134に出力する。予測位置の算出方法は、一般的に利用されている方法である。
【0022】
更新部134は、算出部133で算出された予測位置を利用して航空機データ記憶部14で記憶される航空機データを更新する。
【0023】
航空機データ記憶部14が記憶する航空機データは、例えば、応答から解析された航空機の識別子及び位置情報の他、算出部133で算出された予測位置、応答の受信時刻等を含んでいる。
【0024】
判定部135は、航空機に質問を送信する際に、回数記憶部15で記憶される質問の送信回数に応じて、GICBレジスタのパラメータの取得タイミング(GICB要求信号の送信のタイミング)であるか否かを判定し、判定結果を質問生成部136に出力する。
【0025】
回数記憶部15が記憶する回数データは、航空機の識別子と、識別子で識別される航空機がGICB要求信号を送信後に通常のロールコール質問を送信した回数とを関連付けている。
【0026】
具体的には、回数データで質問を送信する航空機の識別子と関連づけられる値が、所定の値以上であるとき、判定部135は、GICB要求信号を送信するタイミングであると判定する。また、判定部135は、GICB要求信号を送信するタイミングであると判定したとき、回数記憶部15の回数データで当該航空機の識別子と関連づけられる回数を0にリセットする。
【0027】
一方、回数データで質問を送信する航空機の識別子と関連づけられる値が、所定の値以上でないとき、判定部135は、GICB要求信号ではなく、通常のロールコール質問を送信するタイミングであると判定する。また、このとき判定部135は、回数記憶部15の回数データで当該航空機の識別子と関連づけられる回数をインクリメントする。
【0028】
すなわち、判定部135は、回数記憶部15に各航空機航空機にロールコール質問を送信した回数を記憶し、ある航空機にGICB要求信号を送信したとき、この航空機について回数記憶部15で記憶している回数をリセットする。
【0029】
判定部135におけるGICB要求信号の送信タイミングとして設定される回数が10回に設定されている場合、モードS二次監視レーダ1では、前回GICB要求信号を送信後にロールコール質問を連続して10回送信すると、11回目はロールコール質問ではなくGICBレジスタ要求信号を送信する。ここで、設定する値を小さくすると、航空機の捕捉精度が向上するが、モードS二次監視レーダ1がロング応答を受信する回数が多くなってスケジュールの設定が困難になる。一方、設定する値を大きくすると、スケジュールの設定は容易になるが、GICBレジスタのパラメータを使用する回数が少なくなるため、航空機の捕捉精度が低下する。
【0030】
質問生成部136は、判定部135の判定結果に応じて質問を生成し、送信制御部131に出力する。具体的には、判定部135でGICB要求信号を送信するタイミングであると判定された場合、質問生成部136は、GICB要求信号を生成する。また、判定部135で通常のロールコール質問を送信するタイミングであると判定された場合、質問生成部136は、ロールコール質問を生成する。
【0031】
続いて、図3に示すフローチャートを用いてモードS二次監視レーダ1におけるロールコール期間における処理の流れを説明する。
【0032】
モードS二次監視レーダ1では、ロールコール期間には、判定部135は、GICB要求信号の送信タイミングであるか否かを判定する(S1)。
【0033】
判定部135にGICB要求信号の送信タイミングでないと判定された場合(S1でNO)、質問生成部136は、通常のロールコール質問を生成する(S2)。一方、判定部135にGICB要求信号の送信タイミングであると判定された場合(S1でYES)、質問生成部136は、GICB要求信号を生成する(S3)。
【0034】
その後、送信制御部131は、ステップS2又はS3で質問生成部136が生成した信号を送信する(S4)。
【0035】
応答処理部132は、ステップS4で送信制御部131が送信した信号に応答する信号を受信すると(S5)、信号に含まれるモードSアドレスが受信を予測していたモードSアドレスと一致するか否かを判定する(S6)。ここで、モードSアドレスが一致しないとき(S6でNO)、応答処理部132は、不要な信号であるため破棄するが(S7)、モードSアドレスが一致するとき(S6でYES)、応答処理部132は、送信制御部131が送信した質問に対する応答であるとして、ショート応答であるか否かを判定する(S8)。
【0036】
ショート応答であると判定した場合(S8でYES)、応答処理部132は、信号に含まれる方位、高度及び距離を算出部133に出力する(S9)。算出部133は、ステップS4で入力した方位、高度及び距離を利用して、航空機の予測位置を算出する(S10)。その後、更新部134は、ステップS5で算出した予測位置を利用して航空機データ記憶部14の航空機データを更新し(S11)、ステップS1の処理に戻る。
【0037】
一方、ショート応答でなくロング応答であると判定した場合(S8でNO)、応答処理部132は、信号に含まれる動態情報を算出部133に出力する(S12)。算出部133は、ステップS12で入力した動態情報を利用して、次のスキャン時における航空機の予測位置を算出する(S13)。その後、更新部134は、ステップS13で算出した予測位置を利用して航空機データ記憶部14の航空機データを更新し(S14)、ステップS1の処理に戻る。
【0038】
上述したように、実施形態に係るモードS二次監視レーダでは、ロールコール質問の送信時に、通常のロールコール質問の他、GICB要求信号を送信してGICBレジスタのパラメータを取得することで航空機の正確な位置を取得する。また、モードS二次監視レーダでは、GICBレジスタのパラメータから取得した航空機の正確な位置を利用して、予測位置を正確に求めることができるため、航空機との質問応答を確実にし、航空機の捕捉の継続が可能になる。
【0039】
上記のように、本発明を実施形態によって記載したが、この開示の一部をなす論述および図面はこの発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施形態、実施例および運用技術が明らかとなる。また、本発明はここでは記載していない様々な実施形態等を含むことは勿論である。
【符号の説明】
【0040】
1…二次監視レーダ
11…アンテナ
12…送受信部
121…送受切替器
122…送信器
123…受信器
13…信号処理部
131…送信制御部
132…応答処理部
133…算出部
134…更新部
135…判定部
136…質問生成部
14…航空機データ記憶部
15…回数記憶部
2…トランスポンダ
【特許請求の範囲】
【請求項1】
送信装置から航空機に質問を送信する送信手段と、当該質問に対して航空機から送信された応答を受信する受信手段とを備え、当該受信手段で受信した応答に含まれる情報を用いて航空機の飛行を監視するレーダ装置であって、
次のスキャンにおける航空機の位置情報である予測位置を含む航空機データを記憶する航空機データ記憶部と、
ロールコール期間において、前記航空機データに含まれる航空機に対し、ロールコール質問又は航空機に搭載されるトランスポンダのGICBレジスタのパラメータを含む応答の送信を要求する要求信号を生成し前記送信手段に出力する質問生成部と、
前記受信手段がロールコール質問に対して受信した応答に含まれる航空機の位置又はGICBレジスタのパラメータに含まれる航空機の動態情報から当該航空機の予測位置を算出する算出部と、
前記算出部で算出された予測位置で前記航空機データを更新する更新部と、
を備えることを特徴とするレーダ装置。
【請求項2】
前記質問生成手段が前回パラメータ要求信号の生成後にロールコール質問を生成した回数を含む回数データを記憶する回数記憶部と、
前記回数データに記憶される回数が所定数以上であるか否かを判定し、所定回数以上になったときに前記質問生成部にパラメータ要求信号を生成させる判定部と、
を備えことを特徴とする請求項1に記載のレーダ装置。
【請求項3】
送信装置から航空機に質問を送信する送信手段と、当該質問に対して航空機から送信された応答を受信する受信手段とを備え、当該受信手段で受信した応答に含まれる情報を用いて航空機の飛行を監視するレーダ装置における監視方法であって、
ロールコール期間において、航空機データ記憶部で記憶され、次のスキャンにおける航空機の位置情報である予測位置を含む航空機データに含まれる航空機に対し、ロールコール質問又は航空機に搭載されるトランスポンダのGICBレジスタのパラメータを含む応答の送信を要求する要求信号を生成するステップと、
生成したロールコール質問又は要求信号を送信するステップと
送信したロールコール質問に対して受信した応答に含まれる航空機の位置又は送信したGICBレジスタのパラメータに含まれる航空機の動態情報から当該航空機の予測位置を算出するステップと、
算出された予測位置で前記航空機データを更新するステップと、
を備えることを特徴とする監視方法。
【請求項4】
回数記憶部で記憶される、前回パラメータ要求信号の生成後にロールコール質問を生成した回数が所定数以上であるか否かを判定するステップと、
所定回数以上になったときにパラメータ要求信号を生成するステップと、
を備えことを特徴とする請求項3に記載の監視方法。
【請求項1】
送信装置から航空機に質問を送信する送信手段と、当該質問に対して航空機から送信された応答を受信する受信手段とを備え、当該受信手段で受信した応答に含まれる情報を用いて航空機の飛行を監視するレーダ装置であって、
次のスキャンにおける航空機の位置情報である予測位置を含む航空機データを記憶する航空機データ記憶部と、
ロールコール期間において、前記航空機データに含まれる航空機に対し、ロールコール質問又は航空機に搭載されるトランスポンダのGICBレジスタのパラメータを含む応答の送信を要求する要求信号を生成し前記送信手段に出力する質問生成部と、
前記受信手段がロールコール質問に対して受信した応答に含まれる航空機の位置又はGICBレジスタのパラメータに含まれる航空機の動態情報から当該航空機の予測位置を算出する算出部と、
前記算出部で算出された予測位置で前記航空機データを更新する更新部と、
を備えることを特徴とするレーダ装置。
【請求項2】
前記質問生成手段が前回パラメータ要求信号の生成後にロールコール質問を生成した回数を含む回数データを記憶する回数記憶部と、
前記回数データに記憶される回数が所定数以上であるか否かを判定し、所定回数以上になったときに前記質問生成部にパラメータ要求信号を生成させる判定部と、
を備えことを特徴とする請求項1に記載のレーダ装置。
【請求項3】
送信装置から航空機に質問を送信する送信手段と、当該質問に対して航空機から送信された応答を受信する受信手段とを備え、当該受信手段で受信した応答に含まれる情報を用いて航空機の飛行を監視するレーダ装置における監視方法であって、
ロールコール期間において、航空機データ記憶部で記憶され、次のスキャンにおける航空機の位置情報である予測位置を含む航空機データに含まれる航空機に対し、ロールコール質問又は航空機に搭載されるトランスポンダのGICBレジスタのパラメータを含む応答の送信を要求する要求信号を生成するステップと、
生成したロールコール質問又は要求信号を送信するステップと
送信したロールコール質問に対して受信した応答に含まれる航空機の位置又は送信したGICBレジスタのパラメータに含まれる航空機の動態情報から当該航空機の予測位置を算出するステップと、
算出された予測位置で前記航空機データを更新するステップと、
を備えることを特徴とする監視方法。
【請求項4】
回数記憶部で記憶される、前回パラメータ要求信号の生成後にロールコール質問を生成した回数が所定数以上であるか否かを判定するステップと、
所定回数以上になったときにパラメータ要求信号を生成するステップと、
を備えことを特徴とする請求項3に記載の監視方法。
【図1】



【図2】
【図3】

【図2】
【図3】
【公開番号】特開2012−220281(P2012−220281A)
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願番号】特願2011−84683(P2011−84683)
【出願日】平成23年4月6日(2011.4.6)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願日】平成23年4月6日(2011.4.6)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]