
Fターム[5J070AK13]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 物標の識別 (833)
Fターム[5J070AK13]の下位に属するFターム
Fターム[5J070AK13]に分類される特許
1 - 20 / 392
動体検知装置
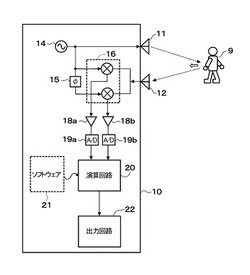
【課題】簡単で小型な構成となり、また回路の精度も重要でなく、占有帯域幅も広くなることなく、動体の存在、位置等を安定して計測できるようにする。
【解決手段】直交ドップラーミキサ16では、対象物9からの受信信号を入力して90度位相の異なるドップラー周波数信号を出力し、計測用ソフトウェア21を用いる演算回路20では、2つのドップラー周波数信号につき、一定時間毎に区切りながら連続して周波数分析を行い、一定時間内のパワースペクトルが最大となる周波数を求め、このパワースペクトル最大の周波数に基づいて計算された速度から一定時間の対象物の移動距離を求めると共に、パワースペクトル最大の周波数の2つのドップラー周波数信号の位相差から対象物の移動方向を求め、この移動方向に対応した正負符号を与えた移動距離を積算することにより対象物の相対位置変化を計測する。
(もっと読む)
踏切障害物検知装置

【課題】検知領域に隣接する非検知領域に送信されたサイドローブの反射波による誤検知を抑制し、踏切道内における障害物の有無を安定して検知することのできる踏切障害物検知装置を提供する。
【解決手段】踏切障害物検知装置1は、踏切道10に設定された検知領域S(S1a〜S1c,S2a〜S2c)及びこれに隣接する非検知領域(S1x,S2x)に電波を送信するとともに、送信した電波の反射波を受信する送受信機2,3を含む。そして、踏切障害物検知装置1は、検知領域である領域S1a、S2aに送信された電波の反射波である第1の反射波と、非検知領域S1x,S2xに送信された電波の反射波である第2の反射波との両方に基づいて、検知領域Sである領域S1a,S2aにおける障害物の有無を判定する。
(もっと読む)
船舶の統合監視のための衛星情報及び船舶情報の統合方法
【課題】本発明は、船舶の統合監視のための衛星情報及び船舶情報の統合方法に関する。
【解決手段】より具体的には、合成開口レーダ(Synthetic Aperture Radar、SAR)から送信される船舶についての情報である衛星情報と、各船舶に搭載された船舶自動識別装置(Automatic Identification System、AIS)から送信される船舶情報とを統合して、前記船舶自動識別装置を搭載し、識別が可能な確認船舶および前記船舶自動識別装置が搭載されていない未確認の船舶をすべて監視することが可能な船舶の統合監視のための衛星情報及び船舶情報の統合方法に関する。
(もっと読む)
自動水栓装置
【課題】泡沫吐水を行う場合であっても、吐水口からの水流の周囲に沿って検知範囲を下流側に確実に延ばすことができる電波センサを用いた自動水栓装置を提供する。
【解決手段】電波放射口27から放射される電波の指向性を決定するための指向性決定手段を備え、指向性決定手段は、止水中よりも吐水中の方が、電波センサの検知範囲のうち、電波強度の高い領域が水流の周囲に沿って下流側に延びるように、電波と水流とを干渉させるように構成されており、水管20は、吐水口26から空気の泡を含む洗浄水を吐水するように構成されており、電波放射口27から放射された電波が、空気の泡を含む洗浄水の水流によって減衰されることを抑制するための減衰抑制手段を更に備えた。
(もっと読む)
受信装置
【課題】本発明は、UWB通信方式を用い、消費電力をより低減し得る受信装置を提供する。
【解決手段】本発明の受信装置Rxは、一定の時間間隔で配列された短パルス波であるウルトラワイドバンド方式の送信信号を送信する送信装置Txから送信された短パルス波が物体に当たって反射した反射波を受信する受信装置Rxであって、受信信号を周波数変換して中間信号を出力する伸長器31と、中間信号から、目的とするパルスの識別および到来時刻識別を行ってパルス検出信号を出力するパルス検出器33と、パルス検出信号に基づいて物体の運動の有無を検出する物体運動検出部とを備え、伸長器31は、受信信号に含まれる短パルス波の発生タイミングに同期して間欠動作する発振器31aを含み、物体運動検出部は、反射波を複数回受信することによって得られた各受信強度の分散値に基づいて前記物体の運動の有無を検出する。
(もっと読む)
携帯端末及び位置及び方位推定プログラム
【課題】携帯端末及び位置及び方位推定プログラムにおいて、携帯端末に搭載されている比較的安価なセンサを利用して、携帯端末の位置及び方位を高精度に検知することを目的とする。
【解決手段】自己位置情報を格納した外部デバイスと短距離無線通信を行う慣性航法を用いる携帯端末において、携帯端末の加速度を検知して加速度情報を出力する検知部と、画像を撮影する撮影部と、外部デバイスと通信する通信部と、通信部が外部デバイスと通信可能になると、外部デバイスから受信した位置情報を携帯端末の初期位置に設定すると共に、加速度情報のAC成分に基づいて撮影タイミングを予測し、外部デバイスの画像を撮影タイミングで撮影するよう撮影部を制御し、外部デバイスの撮影画像から推定したヨー角を携帯端末の初期方位に設定する制御部を備えるように構成する。
(もっと読む)
物標検出装置,壁判定方法
【課題】車両の周囲に存在する物体を検出する物標検出装置において、壁状の静止物体が移動物体として誤認識される頻度を低減する。
【解決手段】探査周期毎に測距データを取得し(S100)、取得した測距データをクラスタリング(S110)し、自車両が停止中ではない場合(S120-N)、クラスタが単一の反射点からなる場合、即ち、クラスタが示す物標が壁であるか否かを判定できない場合(S140-N)、または、クラスタが複数の反射点からなり(S140-Y)、かつ同一クラスタに属する二つの反射点間を結ぶ直線の傾き(基準方向と交差する角度)Yが許容壁範囲内(X−ΔX≦Y≦X+ΔX)にある場合、即ち、クラスタが示す物標が壁であると判定された場合(S150,S160-Y)、そのクラスタを、トラッキング処理や移動/停止判定の処理対象から除去する(S170)。
(もっと読む)
車両周辺監視装置
【課題】車両周辺の監視領域に存在する対象物を少なくともレーダ装置により検知する場合に、監視領域に存在する個々の対象物の検知の信頼性を高めることができる車両周辺監視装置を提供する。
【解決手段】レーダ装置2よりレーダ電波の走査を行なう車両周辺の監視領域を車載カメラ3により撮像し、撮像画像の色情報又は輝度情報に基づいて、監視領域におけるレーダ電波の反射率の分布を反射率推定手段5により推定する。レーダ電波の反射波に受信強度に対する閾値(監視領域の各局所に対応する閾値)を、受信強度閾値設定手段6により、推定した反射率の分布に応じて設定する。対象物認識手段7は、少なくとも前記反射波の受信強度と前記設定された閾値との比較に基づいて前記監視領域に存在する対象物を検知する。
(もっと読む)
移動検知システム
【課題】 子機の移動を精度良く検知することができる移動検知システムを提供する。
【解決手段】 親機4と、親機4との間で電波信号を送受信する子機6と、を備える。親機4は、子機6との間で送受信する電波信号の強度レベルの変化に基づいて、子機6の移動を検知するように構成されている。また、親機4と子機6との間で送受信される電波信号を弱める又は遮断するための電波信号遮断手段34が設けられている。子機6が検知エリア16に位置するときには、親機4と子機6との間における電波信号の送受信が可能であり、子機6が検知エリア16に隣接する非検知エリア20に位置するときには、親機4と子機6との間で送受信される電波信号は、電波信号遮断手段34によって弱められ又は遮断される。
(もっと読む)
後側方障害物検知装置
【課題】自車両がガードレール等の非報知対象物と近い位置にある場合であっても、報知対象物である他車両等が非報知対象物として検知されることを防止することが可能な後側方障害物検知装置を提供する。
【解決手段】自車両の後側方領域内の対象物の存在を検知する後側方障害物検知装置であって、対象物を非報知対象物として検知する検知角度の範囲である非報知対象物検知範囲の大きさを制御する非報知対象物検知範囲制御部と、自車両から非報知対象物までの距離を算出する距離算出部とを備え、非報知対象物検知範囲制御部は、距離算出部によって算出された自車両から非報知対象物までの距離に応じて、非報知対象物検知範囲の大きさを制御する。
(もっと読む)
後側方障害物検知装置
【課題】自車両が低速で走行する場合であっても、非報知対象物であるガードレール等の静止物が、報知対象物である他車両等の移動物として検知されることを防止することが可能な後側方障害物検知装置を提供する。
【解決手段】自車両の後側方領域内の対象物の存在を検知する後側方障害物検知装置であって、対象物を非報知対象物と報知対象物に分類する対象物分類部と、自車両の走行速度に応じて、対象物を非報知対象物に分類する条件を制御する非報知対象物分類条件制御部とを備える。
(もっと読む)
レーダ装置
【課題】各送信側系統間の動作を同期させるための回路構成を追加せずに、簡易な構成により複数のレーダ信号を分離する。
【解決手段】第1レーダ送信部は、所定の符号長の符号系列を、第1符号幅を用いて所定数繰り返した第1変調信号を送信する。第2レーダ送信部は、同じ符号系列を、第2符号幅を用いて所定数繰り返した第2変調信号を送信する。レーダ受信部は、第1符号幅と第2符号幅の差分値よりも小さいサンプリング周期で離散信号に変換するA/D変換部と、A/D変換部からの出力信号を、第1符号幅に応じた所定のサンプル数分遅延させる第1遅延部と、第2符号幅に応じた所定のサンプル数分遅延させる第2遅延部と、A/D変換部と第1遅延部とからの各出力信号とを基に第1相関値を算出する第1相関値算出部と、A/D変換部と第2遅延部とからのからの出力信号とを基に第2相関値を算出する第2相関値算出部とを用いて複数の受信信号を分離する。
(もっと読む)
移動物体検出装置
【課題】複数の移動体を単一の移動物体であると誤認識してしまう状況の発生を抑制
【解決手段】移動物体検出装置1は、レーダ波を前方に向けて送信し、送信したレーダ波の反射波を観測した結果に基づいて、レーダ波を反射した反射点の位置である反射点位置を連続して検出する。検出された2つの反射点位置のうち、移動物体検出装置1から遠い方の反射点位置である第1反射点位置を移動物体における前端部の位置であるとし、移動物体検出装置1から近い方の反射点位置である第2反射点位置を移動物体における後端部の位置であるとして、第1反射点位置と第2反射点位置との間の距離である反射点間距離の時間経過による変動量が、反射点間距離の変動量が小さいことを示す予め設定された変動判定条件を満たす場合に、第1反射点位置および第2反射点位置がそれぞれ移動物体の前端部および後端部の位置であると判断する。
(もっと読む)
追尾装置及びコンピュータプログラム及び追尾方法
【課題】正しい相関決定を実施する。
【解決手段】探知データ取得部110は、時刻ごとにセンサから探知データ512を取得する。航跡データ記憶部120は、航跡データ(航跡群521)を格納する。ゲート計算部131は、航跡データから計算した航跡の予測位置に基づくゲートを計算する。ゲート内外判定部132は、探知データが前記ゲート内に入るかどうかを判定する。相関尤度計算部133は、航跡が初探知データのみから構成される場合は、探知データ取得部110によって取得された前記探知データ情報に基づいて第二探知データとの相関尤度を計算し、航跡が初探知データ以降の探知データからも構成される場合は、航跡の予測位置に基づいて、前記ゲート内に入る探知データとの相関尤度を計算する。
(もっと読む)
レーダ装置
【課題】部品点数の増加を抑えて、ナイキスト周波数による折り返しで発生した信号成分を検出する。
【解決手段】複数のアンテナの送受信波に基づいてターゲットの検出信号を生成する検出信号生成部と、生成されたターゲットの検出信号に対して周波数解析を行い、ターゲットの信号成分を抽出し、該信号成分に対して所定の処理を実行することで、ターゲットまでの距離、ターゲットとの相対速度、ターゲットの方位のうち少なくとも何れか一つを算出する検出信号処理部と、を備え、検出信号生成部は、ナイキスト周波数よりも高い周波数帯域において各アンテナに対応する検出信号に変化を与えるフィルタ部を有し、検出信号処理部は、フィルタ部によって変化が与えられた各アンテナに対応する検出信号から信号成分を取得することで、該信号成分がナイキスト周波数による折り返しで発生した信号成分か否かを判定する。
(もっと読む)
広域マルチラテレーションシステム及び受信装置
【課題】航空機から送信される信号を効率的に検出する。
【解決手段】広域マルチラテレーションシステムで利用される前記受信装置は、質問受信部と、質問信号解析部と、応答受信部と、利得調整部と、出力部とを備える。質問受信部は、二次監視レーダから航空機に送信された質問信号を受信する。質問信号解析部は、前記質問受信部で受信した質問信号から、前記二次監視レーダが質問を送信するタイミングを求める。応答受信部は、航空機から送信された信号を受信する。利得調整部は、前記応答受信部で受信された信号に、前記質問信号解析部で求められたタイミングに応じて信号の利得を調整する。出力部は、前記利得調整部で利得が調整された信号を航空機の位置の測定に使用するデータとして前記位置測定装置に出力する。
(もっと読む)
地下探査装置および地下探査方法
【課題】電磁波を利用して長い探査距離を実現し、かつ地下水面以下でも探査を行うことが可能な地下探査装置および地下探査方法の提供。
【解決手段】電磁波Wを地中に送信する送信機2と、送信機2から送信され、地中を透過した電磁波Wを受信する受信機3と、受信機3により受信した電磁波の速度および振幅の測定値から地中の物性を判定する判定装置としてのPC5とを有し、送信機2または受信機3の一方は地表に配置され、他方は地中の埋設管P内に配置される。
(もっと読む)
レーダ装置、バス、および乗客移動検出方法、並びにプログラム
【課題】車内を移動中の乗客の有無を検出すること。
【解決手段】レーダ波の反射物の車内における位置情報を、反射が起こった位置およびその位置の反射頻度として取得する位置情報取得部21と、取得した反射頻度を、バスの短手方向に加算する反射頻度加算部22と、位置情報取得部21および反射頻度加算部22による処理を、車内に乗客が乗車していないときに予め行って取得した位置情報を記憶する記憶部23と、位置情報取得部21および反射頻度加算部22による処理を、車内に乗客が乗車しているときに行って取得した位置情報から記憶部23に記憶されている位置情報を減算し、その減算結果として乗客の位置情報を検出する乗客位置検出部24と、乗客位置検出部24が検出した異なる時刻の乗客の位置情報を比較して車内を移動中の乗客を検出する乗客移動検出部25と、を有するレーダ装置1を構成する。
(もっと読む)
動き検出装置、及び動き検出装置を備えたエレベータ
【課題】検知モードの切り換えを必要とすることなく、複数の動きの状態を選択して検出することができる動き検出装置を提供する。
【解決手段】動き検出装置2は、対象物に電磁波信号を放射してドップラー信号を取得するドップラー信号検出回路13と、ドップラー信号を増幅する対数増幅器14,15と、ドップラー信号を所定のサンプリング周波数でサンプリングしてAD変換するAD変換回路16と、ドップラー信号に対してFFT処理を実行するFFT処理回路17と、ドップラー信号から対象物の動きを検出する動き検出回路20とを備える。動き検出回路20は、ドップラー信号の振幅又は電力及び位相を計算し、対象物の動きの状態を選択することと、選択された動きの状態に応じてサンプリング周波数を選択的にAD変換回路16に設定することとを繰り返し、複数の動きの状態に応じた異なる周波数成分を含むドップラー信号を取得する。
(もっと読む)
レーダ装置
【課題】レーダ装置において生成する物標情報の信頼性を向上させること。
【解決手段】方位解析処理では、角度差絶対値abが閾値α以下となる到来波の組合せがあれば(S390:YES)、その組合せを構成する到来波についての到来方位θA,θBの中間地点を仮想方位とし、その仮想方位に受信波ビームを向けたときの電力を、仮想電力として導出する(S400)。その仮想方位及び仮想電力を方位情報の1つとして、到来波の各々についての到来方位θ及び到来電力(即ち、方位情報)に加えて登録する(S420)。つまり、方位解析処理では、複数の到来波に対する各到来方位のうち、隣接する2つの物標からの到来波に対する到来方位の間の角度範囲が分離能以下となる場合には、より確からしい方位情報として仮想方位及び仮想電力を導出し、物標認識処理にてペアマッチングを実行する際に用いる。
(もっと読む)
1 - 20 / 392
[ Back to top ]