
Fターム[5J070AK13]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | 物標の識別 (833)
Fターム[5J070AK13]の下位に属するFターム
Fターム[5J070AK13]に分類される特許
121 - 140 / 392
レーダ装置
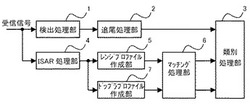
【課題】 正確に目標を類別できるレーダ装置を得る。
【解決手段】 マッチング処理部6において、受信信号に基づき作成したレンジプロファイルおよびドップラプロファイルと候補目標毎に予め保持する参照情報とを照合してレンジプロファイル相関値およびドップラプロファイル相関値を算出し、類別処理部3において、目標の位置情報や速度情報などを含む追尾情報に基づき各々重み付けされたレンジプロファイル相関値とドップラプロファイル相関値とを用いて目標を類別する。
(もっと読む)
無線センサ装置

【課題】移動体の有無と、移動体が存在する場合にはその移動体の方位とを同時に検知できる無線センサ装置を提供すること。
【解決手段】第1、第2及び第3の送受信アンテナ1L,1C,1Rと、第1、第2及び第3の検出用ダイオード3L,3C,3Rと、これら送受信アンテナ1L,1C,1R及び検出用ダイオード3L,3C,3Rにそれぞれパルス信号を供給するパルス発生器2と、第1の検出用ダイオード3Lの出力信号と第3の検出用ダイオード3Cの出力信号とが入力する第1の差動増幅回路4と、第2の検出用ダイオード3Rの出力信号と第3の検出用ダイオード3Cの出力信号とが入力する第2の差動増幅回路5と、第1の差動増幅回路4の出力信号と第2の差動増幅回路5の出力信号との和信号を検出する加算器11と、第1の差動増幅回路4の出力信号と第2の差動増幅回路5の出力信号との差信号を検出する減算回路12とを具備した無線センサ装置である。
(もっと読む)
パルス圧縮装置および物標探知装置
【課題】ノンリニアFMチャープ送信信号を用いても、サイドローブを抑圧することができるパルス圧縮装置を実現する。
【解決手段】パルス圧縮部15のフーリエ変換部51は、時間軸の受信信号Sr(t)を周波数軸の受信信号Sr(ω)に変換する。マッチドフィルタ52は、受信信号Sr(ω)にパルス状送信信号の複素共役からなるマッチドフィルタ係数Ks(ω)を乗算し、信号Sd(ω)を出力する。平滑処理部53は、信号Sd(ω)にマッチドフィルタ出力の周波数スペクトルを滑らかにする平滑係数Ks(ω)を乗算し、平滑処理後の信号Sds(ω)を出力する。逆フーリエ変換部54は、周波数軸の平滑処理後の信号Sds(ω)を時間軸の平滑処理後の信号Sds(t)に変換し出力する。
(もっと読む)
移動体検知システム
【課題】基地局端末と被測距端末との間、又は複数の基地局端末間に存在する移動体を検知することができる移動体検知システムを得る。
【解決手段】複数の基地局端末と、1又は複数の被測距端末4とを備え、基地局端末は、被測距端末4及び/又は他の基地局端末と無線信号を授受し、無線信号の伝播遅延時間及びRSSIを求め、該伝播遅延時間及びRSSIに基づき、当該基地局端末と、被測距端末4又は他の基地局端末との間の移動体5の有無を検知するものである。
(もっと読む)
特定装置、特定プログラム及び特定方法
【課題】災害等の現象が発生した領域を特定することを目的とする。
【解決手段】測定データ入力部110は、観測エリアに対して、偏波特性の異なる複数の電波が反射して得られる散乱波の少なくとも2種類の偏波成分を測定した結果であって、A時点において測定した結果である測定データAと、A時点と異なるB時点において測定した結果である測定データBとから抽出された散乱成分を、それぞれ散乱成分Aと散乱成分Bとして入力する。散乱波差計算部140は、観測エリアにおける所定の領域毎に、散乱成分Aと散乱成分Bとの差を示す散乱成分差を計算する。領域特定部150は、観測エリアのうち、散乱成分差が閾値よりも大きい領域を、所定の現象が発生した領域として特定する。
(もっと読む)
障害物検出装置
【課題】車両周辺の障害物の位置・形状及びスペースを広範囲かつ正確に検出すること。
【解決手段】アレイ状に配置された素子から送信波を送信し、障害物での反射波を各素子で受信する。その受信信号を受信した時間から障害物の距離を算出し、各素子の受信信号の位相差から障害物の方向を算出する。また、広範囲で障害物を検出するために、各素子に入力する送信信号の位相差を適宜変えて、送信波の合成指向性を制御するとともに、各素子の受信信号に乗算する係数を適宜変えて、受信波の合成指向性を制御する。特に、隣接素子間に位相差を同相、逆相交互に設定することで、指向性を狭角、広角と交互に切り替え、広範囲の障害物の位置検出を可能とする。さらに、移動しながら検出した位置情報から、車両走行経路周辺の障害物の位置・形状及びスペースの認識を可能とする。
(もっと読む)
侵入検知システム、無線信号監視装置、警報端末、侵入者検知方法、そのプログラムおよび記録媒体
【課題】監視エリア内に侵入した人間の有無を検出し、かつ、検出した人間が該監視エリア内への侵入が許可された人物かを容易に判別可能な仕組みを提供する。
【解決手段】無線LAN用のアクセスポイント101からの無線信号102の電波強度を監視エリア104内のアクセスポイント101から最も離れた位置に配置した無線信号監視装置105にて測定し、あらかじめ定めた電波強度閾値よりも低下した場合、監視エリア104内に侵入者103が侵入したものと判定し、LAN/WAN106経由で警報端末107に通報する。警報端末107はアクセスポイント101にアクセスし、侵入者103が携行する端末109固有の端末情報を取得し、侵入が許可される人物が携行する端末固有の端末情報をあらかじめ登録している端末管理サーバ108にアクセスし、取得した前記端末情報が登録されていない場合、許可されていない不法な侵入者と判定する。
(もっと読む)
緊急応答システム
【課題】質問側からの呼び掛けに応答側から応答が得られなかったとき、その理由が質問側で判明できるようにした緊急応答システムを提供すること。
【解決手段】質問機システム8から質問信号を送信し、航空機に搭載された応答機1から質問信号に対する応答信号を質問機システム8に送信するシステムにおいて、質問側の無線機9とは別の第1の無線機9と、応答機1に備えられている無線部2とは別に航空機に備えられた第2の無線機7を備え、応答機1に故障が発生したとき、第2の無線機7と第1の無線機9を介して通信を行い、応答機1に故障が発生したことが質問機システム8に通知され、レーダ卓の表示部10に表示されるようにしたもの。
(もっと読む)
物体検出装置
【課題】路側物近傍を走行する車両の位置を正確に検出する。
【解決手段】物体検出装置1は、車両に搭載され、レーダセンサからなる第1センサ24とは相違するセンサである第2センサ21〜23を介して、該車両の周囲に存在する物体を検出する路側物検出部11と、路側物検出部11によって路側物が検出されているか否かを判定する判定部12と、判定部12によって路側物が検出されていると判定された場合に、第2センサ21〜23を介して、前記路側物の位置情報を取得する位置取得部13と、位置取得部13によって取得された前記路側物の位置情報に基づいて、第1センサ24を介して、前記路側物の近傍を走行する他の車両を検出する車両検出部14と、を備える。
(もっと読む)
レーダ装置
【課題】検出した各物標のエコーの種類を正確に識別するレーダ装置を提供する。
【解決手段】挙動データ発生部11は、エコーデータが物標検出閾値以上であるかを判定し、判定結果に基づく挙動判定用データを生成するとともに、挙動判定用データを過去数スキャン分並べた挙動データPnを生成する。連続性検出部9は、エコーデータのスイープの方位方向およびスイープの回転方向である距離方向に対する連続性を検出し、連続性データAnを生成する。エコー種類判定部6は、今回のエコーデータが固定物標のエコーか移動物標のエコーか不要波のエコーかを、挙動データPnおよび連続性データAnを組み合わせて判断する。さらには、海面反射領域設定部14からの海面反射領域データBnを用いることで、海面反射のエコーであるかも判断する。
(もっと読む)
人工物検出装置及び人工物検出方法及び人工物検出プログラム
【課題】多偏波観測によって人工物のみを精度よく検出する。
【解決手段】合成開口レーダを用いた2偏波観測あるいは4偏波観測の結果を偏波特性データ201として予め記憶する人工物検出装置100にて、散乱成分抽出部101は、偏波特性データ201から、表面散乱成分と2回散乱成分とを、観測位置ごとに抽出する。人工物検出部104は、散乱成分抽出部101により2回散乱成分が抽出された観測位置の集合である第1領域と、第1領域の周囲で散乱成分抽出部101により所定量以上の表面散乱成分が抽出された観測位置の集合である第2領域とを含む領域を、人工物として検出する。
(もっと読む)
物体検出装置
【課題】反射強度が低い物標を精度良く移動物体として検出することが可能な物体検出装置を提供する。
【課題手段】物体検出装置1では、ミリ波レーダ2により、左側方及び右側方に電磁波が照射され、その反射強度の分布から複数の物標が検出され、レーダ用ECU1により、自車両が走行するレーンに左側及び右側のそれぞれに隣接するレーンの有無が判定され、隣接レーンの有無に応じた抽出条件により、左側及び右側のそれぞれにおいて検出された物標から移動物体を抽出する。隣接レーンの有無により移動物体の抽出条件が変更されるので、反射強度が比較的低い二輪車や反射強度が高い四輪車を精度良く抽出することが可能となる。
(もっと読む)
車両制御システム
【課題】路面上にある小型の制御対象外目標物体からレベルの大きい受信信号が得られた場合であっても、車両制御システムの誤動作を回避する。
【解決手段】 車両の略水平方向の探索空間にレーダ信号を送信して目標物体による反射信号を受信し、受信信号に基づき前記目標物体の距離を検出するレーダ装置を搭載した車両の制御システムであって、前記探索空間の一部を含む撮影画像から目標物体画像を検出する目標物体画像検出手段と、前記受信信号のレベルが基準レベルを上回り、かつ前記目標物体画像が前記探索空間の下部領域以外の前記撮影画像から検出されたときに、前記検出された距離に基づいて前記車両のアクチュエータの動作を制御する制御信号を出力する制御手段とを有するので、制御対象外目標物体からレベルの大きい受信信号が得られた場合であっても、車両制御システムは誤動作を回避できる
(もっと読む)
無線タグ通信システム、無線タグの電池残量推定方法及び監視装置
【課題】無線タグに新たな構成を追加することなく、センター装置側で無線タグの電池残量を的確に検知できる無線タグ通信システムを提供すること。
【解決手段】無線タグ110とタグリーダ120との距離を算出するタグ位置算出部123と、無線タグ110からの信号の受信レベルを検出する受信レベル検出部122と、前記距離と前記受信品質とに基づいて、前記無線タグの電池残量を判定する電池残量判定部131とを設けたことにより、無線タグ110に新たな構成を追加することなく、センター装置(タグリーダ120及び管理装置130)側で無線タグ110の電池残量を的確に検知できる無線タグ通信システム100を実現できる。
(もっと読む)
車両探索システム
【課題】携帯機を小型化すること。
【解決手段】車両側装置20は、車両の異なる位置に設けられた3本のアンテナ21と、各アンテナ21から所定の周波数の送信信号を送信すると共に携帯機30から返信される返信信号を受信し、送信した各送信信号及び受信した各返信信号とを比較して各アンテナ21と携帯機30との距離情報を測定するレーダー回路22と、測定した距離情報から車両側から見た携帯機30の方角又は当該携帯機30から見た車両の方角を表す方位情報を検出する方位検出手段24とを備え、方位情報を含んだ情報を携帯機30へ送信する。携帯機30は、1本のアンテナと、車両側装置20から送信された送信信号を受信して送信信号と同期した返信信号を送り返すと共に、車両側装置20から送信された方位情報を含んだ情報を受信するトランスポンダと、方位情報に基づいて車両の方向に関する情報を出力する情報出力手段と、を備えた。
(もっと読む)
航空管制レーダ及びスキッタの識別方法
【課題】航空機から受信するショートスキッタとロングスキッタを識別し、航空機の捕捉に有効に利用する。
【解決手段】受信信号が、質問信号に対する応答信号であるか否かを判定する応答判定手段132aと、応答判定手段によって受信信号が応答信号でないと判定された場合、当該受信信号がスキッタとして定められる規定のフォーマットに適合するか否かの信頼性を判定し、当該信頼性の判定を利用してショートスキッタ又はロングスキッタのいずれであるかを識別するDF部にエラーがあるか否かを判定するDF部信頼性判定手段132cと、DF部信頼性判定手段によって受信信号が規定のフォーマットに適合するが、DF部にエラーがあると判定された場合、当該受信信号のデータ長に応じてショートスキッタ及びロングスキッタを抽出する抽出手段132eとを備える。
(もっと読む)
位置推定装置及び位置推定方法
【課題】移動物体の位置推定精度の向上を図る位置推定装置及び位置推定方法を提供する。
【解決手段】運動パラメータ選択部202が移動物体のID情報に対応する移動物体の属性情報と、位置情報に対応するフロアの属性情報とをデータベース部112から取得し、取得した属性情報に基づいて、最適な運動パラメータを選択する。分布更新部203は、分布パラメータ保持部204に保持された一つ前の時刻における移動物体の位置の分布パラメータ、位置情報、選択された運動パラメータを用いて、現在の時刻における移動物体の位置の分布パラメータを算出し、最尤位置算出部205は、算出された移動物体の位置の分布パラメータから移動物体の位置として最も確率が高い位置を算出する。
(もっと読む)
二次監視レーダ
【課題】プリアンブルが含む情報をより利用することができる二次監視レーダを提供する。
【解決手段】二次監視レーダ1は、第1パルスP1〜第4パルスP4を有するプリアンブルPAを含むモードS用の応答Rを受信する。二次監視レーダ1は、プリアンブルPAのパルスP1〜P4の立上りを検出して立上り検出信号Srを出力する立上り検出部42と、プリアンブルPAのパルスP1〜P4の立下りを検出して立下り検出信号Sdを出力する立下り検出部43と、立上り検出信号Srと立下り検出信号Sdとの間に一定間隔で入力されるクロックパルスCLKをカウントしてパルス幅WC1〜WC4を測定するカウンタ部41とを含むプリアンブルパルス幅カウンタ処理部34を備えている。
(もっと読む)
アンテナ回転からアンテナ回転にかけてのレーダブリップの多次元時間的運動フィルタリングの方法
【課題】アンテナ回転からアンテナ回転にかけてのレーダブリップの多次元時間的運動フィルタリングの方法を提供する。
【解決手段】主に、検出システムの処理サブシステムから供給されるブリップを、トラック生成のために解析する前に、格付けすることを可能にする方法からなり、各トラックは、検出された移動目標の軌道を表すと仮定される。解析継続時間が考慮され、解析継続時間の間に検出されたすべてのブリップが考慮される。これらのブリップは、サブセットに分割され、各サブセットは、初期位置および速度ベクトルで定義された同一解析チャネルにおいて解析継続時間の間に検出されたブリップに対応する。このように形成されたサブセットは、グループ分けされ、同一グループが、複数の属性の結合されたアサーションが妥当と判断されたブリップを含むサブセットを結合する。
(もっと読む)
RFIDタグリーダライタシステム、RFIDタグリーダライタ装置、及び、RFIDタグ
【課題】 RFIDタグリーダライタ装置から所定距離にあるRFIDタグとのみ通信できるRFIDタグリーダライタシステムを提供することにある。
【解決手段】 RFIDタグリーダライタ装置10は、出力電力と応答対応距離とに関する情報を送信し(S12)、RFIDタグ80は、受信電力のレベルに基づき、応答距離の範囲内か否かを判断し(S26)、応答距離の範囲内のときに(S26:Yes)、RFIDタグリーダライタ装置に対して応答する(S28)。このため、RFIDタグリーダライタ装置から所定距離にあるRFIDタグとのみ通信できる。
(もっと読む)
121 - 140 / 392
[ Back to top ]