
Fターム[5J070BB06]の内容
レーダ方式及びその細部 (42,132) | 追跡(追尾) (806) | 追跡一般 (468) | 予測追跡 (175)
Fターム[5J070BB06]に分類される特許
1 - 20 / 175
目標追尾装置
追尾装置
レーダ装置
【課題】DDOA法に基づくレーダ装置においてDOAの不定性を軽減するためのレーダシステムを提供する。
【解決手段】レーダー装置は、距離、方向、速度を記憶するデータ記憶部114と、目標物体150の運動軌跡を予測する追尾予測部115と、レンジの近接を判定し、レンジ制御信号を生成する干渉判定部116と、レンジ制御信号に応じて送信用拡散符号、受信用拡散符号の一方に1チップ未満の位相オフセットを与える符号制御部109と、レンジ制御信号に応じて干渉除去処理を行う干渉分離部110とを備え、干渉分離部110は、レンジ制御信号に応じて、近接する目標物体の当該レンジの信号または当該レンジに隣接するレンジの信号の一方を選択し、距離決定部111、速度検知部112、方向検知部113の入力とする。
(もっと読む)
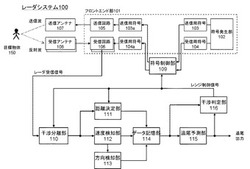
ドップラーレーダシステム、及び物体検知方法

【課題】受信アンテナの増加を抑制しつつ、物体の位置の検出精度を向上する。
【解決手段】本発明に係るドップラーレーダシステム100は、送信アンテナ120と、複数の受信アンテナ121と、目標物体150に含まれる複数の反射点の各々の位置を示す複数の測定点を算出するマイクロドップラー演算部105と、第1間隔を有する第1分割枠を用いて、測定点の第1重心116aを算出する第1重心算出部106aと、第1間隔より狭い第2間隔を有する第2分割枠を用いて、測定点の第2重心116bを算出する第2重心算出部106bと、複数の第2重心116bの中から、第2重心116bと第1重心116aとの位置関係に基づいて、少なくとも1つの第2重心116bを目標物体150の位置に決定する重心決定部107とを備える。
(もっと読む)
船舶の統合監視のための衛星情報及び船舶情報の統合方法
【課題】本発明は、船舶の統合監視のための衛星情報及び船舶情報の統合方法に関する。
【解決手段】より具体的には、合成開口レーダ(Synthetic Aperture Radar、SAR)から送信される船舶についての情報である衛星情報と、各船舶に搭載された船舶自動識別装置(Automatic Identification System、AIS)から送信される船舶情報とを統合して、前記船舶自動識別装置を搭載し、識別が可能な確認船舶および前記船舶自動識別装置が搭載されていない未確認の船舶をすべて監視することが可能な船舶の統合監視のための衛星情報及び船舶情報の統合方法に関する。
(もっと読む)
追尾装置
【課題】高い追尾性能を得ることができ、しかも、多目標を追尾する場合であっても処理負荷を低減することができる追尾装置を提供する。
【解決手段】座標系を指定する座標系制御部6と、入力された観測値の座標系を、座標系制御部から指定された座標系に座標変換する観測値用座標変換部1aと、座標系制御部から指定された座標系において、観測値用座標変換部で座標変換することにより得られた観測値と追尾している目標の航跡との相関をとる相関処理部2aと、相関処理部で相関がとられた結果に対して、座標系制御部によって指定された座標系において、フィルタリング処理を実施するフィルタリング処理部4aとを備え、該観測値を取得した機器の動作モードである捜索モード又は追尾モードに応じて、観測値用座標変換部、相関処理部およびフィルタリング処理部で使用する座標系を該追尾装置の運用中に切り換え制御する座標系制御部から構成される。
(もっと読む)
移動体位置推定装置、移動体位置推定方法、及び、移動体位置推定プログラム
【課題】移動体がすれ違うなどの観測値と対象物の対応関係が曖昧になるシーンでも、位置推定精度の低下を招かず、対象物の移動経路の推定誤りを引き起こさない、移動体位置推定装置及び方法、並びに、移動体位置推定プログラムを提供する。
【解決手段】識別情報割り当て手段103は、移動体の識別情報と位置情報を低頻度で出力する第1の観測手段101から観測値が得られる時点Aと、時点Aの次に観測手段101から観測値が得られる時点B、及び、時間区間ABにおいて、移動体の位置情報を高頻度で出力する第2の観測手段102から得られる観測値の系列に対して、時点A、Bにおける第1の観測手段101の観測値と第2の観測手段102の観測値の位置の近さが最小になるように、及び、時間区間ABにおける観測手段102の観測値の移動量の合計が最小になるように、第2の観測手段102の観測値に対して第1の観測手段の観測値に含まれる識別情報を割り当てる。
(もっと読む)
目標物管理装置および目標物管理方法
【課題】目標物の誤検出を抑止するとともに、センサの数を抑えて目標物の数を効率よく管理する目標物管理装置および目標物管理方法を提供する。
【解決手段】監視対象範囲に対応する地図情報の2つ以上の座標により表される複数の経路と、経路が接続する点を表す分岐点とを関連付け、センサ各々が探知した1つ以上の目標物の座標を、複数の経路のいずれかに関連付ける分配部と、1回目の走査時に探知した分岐点に関連付けられている経路各々の目標物の数と、2回目の走査時に探知した経路各々の目標物の数とを用いて、経路各々の目標物の数の増減値を算出し、経路各々の目標物の数の増減値から分岐点ごとに、経路各々に関連付けられている目標物の数の増加数または減少数を求める増減算出部と、増加数または減少数を、前回更新部で求めた経路の目標物の数に加えて今回の該経路の目標物の数とする更新部と、を備える目標物管理装置である。
(もっと読む)
目標追尾装置
【課題】PRI内距離を目標の運動諸元の推定処理に利用できるようにして、目標の運動諸元の推定精度を高めることができる目標追尾装置を得ることを目的とする。
【解決手段】PRI内距離ゲート内外判定部14によりゲート内にあると判定されたPRI内距離毎に推定値の仮説を生成して、その仮説の信頼度を算出し、1以上の仮説の中で、信頼度が高い仮説を採択する推定値仮説生成部15や、推定値仮説生成部15により採択された仮説に係るPRI内距離を用いて、現時点での運動諸元の推定値を更新するPRI内距離フィルタ処理部16などを備える。
(もっと読む)
追尾装置
【課題】フィルタを簡易に切り替えて早期に目標に追従可能とし、計算量の削減を図る。
【解決手段】等速直線運動モデル、蛇行運動モデル、多重運動モデルに基づくカルマンフィルタを用い、観測値から予測値、予測誤差共分散行列、観測誤差共分散行列および平滑値を算出する各カルマンフィルタ処理手段3〜5と、観測値、カルマンフィルタ処理手段3による各値に基づいて、目標が等速直線運動であるかを判定する等速直線運動判定手段7と、観測値、各カルマンフィルタ処理手段による各値に基づいて、各運動モデルに対する尤度を算出する尤度計算手段6と、各運動モデルに対する尤度および等速直線運動判定手段7による判定結果に基づいて、各運動モデルに対する信頼度を算出する信頼度計算手段8と、各運動モデルに対する信頼度に基づいて、各平滑値の加重平均値を算出する加重平均計算手段9とを備えた。
(もっと読む)
追尾装置及びコンピュータプログラム及び追尾方法
【課題】正しい相関決定を実施する。
【解決手段】探知データ取得部110は、時刻ごとにセンサから探知データ512を取得する。航跡データ記憶部120は、航跡データ(航跡群521)を格納する。ゲート計算部131は、航跡データから計算した航跡の予測位置に基づくゲートを計算する。ゲート内外判定部132は、探知データが前記ゲート内に入るかどうかを判定する。相関尤度計算部133は、航跡が初探知データのみから構成される場合は、探知データ取得部110によって取得された前記探知データ情報に基づいて第二探知データとの相関尤度を計算し、航跡が初探知データ以降の探知データからも構成される場合は、航跡の予測位置に基づいて、前記ゲート内に入る探知データとの相関尤度を計算する。
(もっと読む)
追尾装置
【課題】センサと目標との距離が大きい場合には追尾維持性能を発揮し、センサと目標との距離が小さい場合には、各追尾目標に対する追尾精度を向上させる。
【解決手段】センサを介して2つの観測値を取得した場合に、センサ位置を基準点とした2つの観測値のなす角度を算出する角度算出部21と、角度算出部21により算出された2つの観測値のなす角度に基づいて2つの観測値に対する重み係数を算出し、重み係数に基づいて各観測値の各観測値間での重心をそれぞれ算出する角度基準重心算出部22と、角度基準重心算出部22により算出された各観測値の重心および各追尾目標に対する予測値に基づいて、各追尾目標に対する平滑値を算出する平滑処理部24とを備えた。
(もっと読む)
レーダ装置
【課題】レーダ装置において生成する物標情報の信頼性を向上させること。
【解決手段】方位解析処理では、角度差絶対値abが閾値α以下となる到来波の組合せがあれば(S390:YES)、その組合せを構成する到来波についての到来方位θA,θBの中間地点を仮想方位とし、その仮想方位に受信波ビームを向けたときの電力を、仮想電力として導出する(S400)。その仮想方位及び仮想電力を方位情報の1つとして、到来波の各々についての到来方位θ及び到来電力(即ち、方位情報)に加えて登録する(S420)。つまり、方位解析処理では、複数の到来波に対する各到来方位のうち、隣接する2つの物標からの到来波に対する到来方位の間の角度範囲が分離能以下となる場合には、より確からしい方位情報として仮想方位及び仮想電力を導出し、物標認識処理にてペアマッチングを実行する際に用いる。
(もっと読む)
レーダ装置及び監視方法
【課題】航空機の予測位置を正確に特定し、捕捉する。
【解決手段】モードS二次監視レーダは、航空機データ記憶部と、質問生成部と、算出部と、更新部とを備える。航空機データ記憶部は、次のスキャンにおける航空機の位置情報である予測位置を含む航空機データを記憶する。質問生成部は、ロールコール期間において、航空機データに含まれる航空機に対し、ロールコール質問又は航空機に搭載されるトランスポンダのGICBレジスタのパラメータを含む応答の送信を要求する要求信号を生成し送信手段に出力する。算出部は、受信手段がロールコール質問に対して受信した応答に含まれる航空機の位置又はGICBレジスタのパラメータに含まれる航空機の動態情報から当該航空機の予測位置を算出する。更新部は、算出部で算出された予測位置で航空機データを更新する。
(もっと読む)
追尾装置
【課題】テンプレートマッチングと比べて目標領域の抽出精度の向上および抽出処理負荷の低減を図ることのできる追尾装置を得る。
【解決手段】目標抽出装置100は、追尾フィルタ装置200が出力した追尾予測値と新規入力画像各画素との間で、3次元空間上と画像平面上の、次元の異なる2種類の相関処理を実行し、これらの相関値から新規入力画像中の目標画素および目標領域を抽出し、追尾フィルタ装置200への入力となる新規画像上の追尾点を決定する。追尾フィルタ装置200は、目標抽出装置100が出力した追尾点に基づいて、3次元空間上での追尾点の位置、速度、強度の予測を行い、次のフレームの追尾予測値として出力する。
(もっと読む)
弾着観測装置
【課題】 従来の弾着観測装置は、追尾目標に対するビームの受信信号から水柱を検出し、弾着位置として観測していたが、弾丸が目標の近くに弾着した場合や波が荒れている場合、水柱が目標の陰に隠れてしまう場合等、水柱の検出が困難な状況では弾着位置を観測できず、追尾目標と弾着位置との誤差を出力できないことが課題であった。
【解決手段】 弾丸に対しビームを照射した受信信号から検出される弾丸の観測値をもとに弾丸の弾道を算出し、その高度が0となるときを弾着位置として算出するとともに、弾丸が水面に着弾したときに発生する水柱から弾着位置を算出する。
(もっと読む)
レーダ装置
【課題】対応関係がある分解能セルの信号同士を加算して、目標の信号電力を大きくすることができるようにする。
【解決手段】レーダAにおけるビーム走査領域内の各々の分解能セルを検定セルに設定し、検定セル毎に目標の運動仮説を生成する運動仮説生成部4と、運動仮説生成部4により生成された目標の運動仮説にしたがって各々の検定セルに対応するレーダBにおけるビーム走査領域内の分解能セルを特定する分解能セル特定部5と、分解能セル特定部5により特定された分解能セルを中心とする一定領域内の分解能セルの中で、信号検波部2により検波された信号の振幅値が最大の分解能セルを積分セルに決定する探索型積分セル決定部7とを設ける。
(もっと読む)
センサ誤差較正システム
【課題】観測空間の位置・観測条件によりセンサの観測誤差が異なる場合にも、高精度に誤差補正を行う。
【解決手段】基準位置情報に基づいて観測空間の位置を算出し、センサ3を制御するセンサ制御手段8と、基準目標1の観測位置情報および基準位置情報に基づいて観測誤差・誤差補正値を算出する観測誤差算出手段10と、基準位置情報に基づく飛翔経路情報・観測環境情報を含む観測条件、観測空間の位置および誤差補正値を関連付けて蓄積する情報蓄積器12と、観測目標の飛翔経路情報・観測環境情報を含む観測条件および当該観測位置情報に基づく観測空間の位置に基づいて、情報蓄積器12から誤差補正値を抽出する観測誤差補正値最適化手段16と、抽出された誤差補正値を用いて、センサ3により観測された観測目標の位置を補正する観測誤差補正手段17とを備えた。
(もっと読む)
目標追跡装置
【課題】等速直線運動を行う目標と等速直線以外の運動を行う目標の両方に対して追跡性能を向上させた目標追跡装置を得る。
【解決手段】外部から入力される目標の状態ベクトルに基づいて、目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して目標の航跡を算出するための補正情報であって、該パッシブセンサを中心とする座標系における補正情報を算出する補正情報算出部5aと、パッシブセンサからの測角データと補正情報算出部からの補正情報とに基づいて、該パッシブセンサを中心とする座標系における複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標の航跡として出力する追跡処理部2aを備える。
(もっと読む)
レーダ信号処理装置
【課題】 一定時間間隔でレーダ信号処理装置にデータが入力されるが、レーダ信号処理装置で同時に信号処理可能なデータ数以上の数のデータが入力される場合、信号処理を割り当てる演算部が信号処理中のため割当できず、入力されたデータのシステム的な重要度に関わらず破棄され、その場合にシステム的に重要度が高いデータ破棄されることにより、信号処理ができないことが問題となる。
【解決手段】 レーダ信号処理装置内の信号処理結果から、将来入力されるデータの入力および信号処理時間を予測し、入力されるデータを予測する度に信号処理を実施する演算部の稼働率が向上するように割当を変更することで、データの信号処理終了時刻が早くなり、かつ処理データ数を最大とする計画的な負荷分散制御を行う。
(もっと読む)
1 - 20 / 175
[ Back to top ]