
Fターム[5J070BB06]の内容
レーダ方式及びその細部 (42,132) | 追跡(追尾) (806) | 追跡一般 (468) | 予測追跡 (175)
Fターム[5J070BB06]に分類される特許
121 - 140 / 175
多目標追尾装置
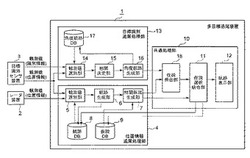
【課題】従来の多目標追尾装置は、レーダから得た目標の位置情報のみに基づいて目標航跡の相関仮説を生成して行うために、複数の目標の航跡が接近する等複雑な航跡を有する場合には、誤った相関結果を導く可能性が高く、誤追尾が生じやすいという課題があった。本発明は、より信頼度が高い目標追尾が可能な多目標追尾装置を得ることを目的とする。
【解決手段】仮説照合部18は、位置情報追尾処理部4が目標の位置情報から生成した目標航跡を含む仮説群と、目標識別追尾処理部13が目標の位置情報と目標の識別情報から生成した角度航跡との類似度を計算することにより、前記仮説群に含まれる仮説の取捨選択を行う。これにより、誤った相関結果を導く可能性を低くし、より信頼度が高く、正確な相関決定ができる。
(もっと読む)
センサ制御装置

【課題】3次元センサのビーム指向方向やビーム指向範囲を適正に制御して、3次元センサの3次元角度の測位精度を高めることができるセンサ制御装置を得ることを目的とする。
【解決手段】軌道テンプレートと目標の発射諸元パラメータを用いて目標の2次元角度を予測し、その2次元角度の予測値と2次元センサ1により測位された2次元角度の観測値との差異が許容範囲内にあるか否かを判定し、その判定結果が許容範囲内である旨を示す場合、その発射諸元パラメータを用いて目標の3次元位置を予測するようにしたものである。
(もっと読む)
車両の障害物検知装置
【課題】物標の位置をより正確に予測することができる障害物検知装置の提供。
【解決手段】自車両前方の物標を検知する障害物検知手段11と、検知物標の情報を受け、自車両の作動機器を制御する作動機器制御手段12とを備え、障害物検知手段11は、所定のサンプリング時間ごとに、物標のまでの距離と、物標との相対速度と、物標の方角とを含む物標データを抽出する物標データ抽出部111と、物標データに基づいて、次回のサンプリング時の物標位置を予測する物標位置予測部112と、検知物標の位置と予測物標の位置とを照合し、同一物標を識別する物標識別部113とを有し、物標データ抽出部111は、物標の横方向の速度成分を更に求め、物標位置予測部112は、相対速度とともに横方向の速度成分を使用して、物標の位置を予測する。
(もっと読む)
追尾方法及びその装置
【課題】 加速度運動を行う目標を精度よく追尾する追尾方法を得る。
【解決手段】 第1の時間の平滑誤差共分散行列から第2の時間の予測誤差共分散行列を算出し、第2の時間の予測誤差共分散行列と第2の時間のゲイン行列と所定の観測雑音共分散行列とに基づいて第2の時間の平滑誤差共分散行列を算出し、第2の時間の予測誤差共分散行列と観測雑音共分散行列から、第2の時間の予測値ベクトルに含まれる目標の位置についてのゲインである位置ゲインと第2の時間の予測値ベクトルに含まれる目標の速度についてのゲインである速度ゲインとを含む第2の時間のゲイン行列を算出し、第2の時間の観測値を取得し、取得した観測値と第2の時間の予測値ベクトルと第2の時間のゲイン行列とに基づいて第2の時間の平滑値ベクトルを算出する追尾方法において、速度ゲインとして固定値のゲインを含む第2の時間のゲイン行列を算出する。
(もっと読む)
レーダ追跡装置及びその方法
追跡の測定値を極座標系から直交座標系に変換することによって発生するレーダ測定値の測定誤差共分散の変化を基に、α−β追跡フィルタのα及びβフィルタ利得を求めるための追跡指数を計算する追跡指数部、及び追跡指数変化率に対するα及びβフィルタ利得の変化率の偏微分係数と追跡指数変化量とを基に、α及びβフィルタ利得の変化量を計算し、α及びβフィルタ利得を更新するフィルタ利得更新部を具備するα−β追跡フィルタを有するレーダ追跡装置である。 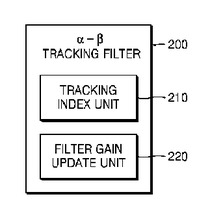 (もっと読む)
(もっと読む)
レーダ制御装置およびネットワークレーダ
【課題】 監視覆域がそれぞれ設定される複数のレーダから構成されるネットワークレーダにおいて、監視対象エリアを効率的に監視するネットワークレーダおよびこれに用いるレーダ制御装置を得る。
【解決手段】 レーダ制御装置は、目標物の想定航跡d3およびレーダ諸元d1に基づき監視覆域ごとで且つ想定航跡ごとに想定航跡上の目標物の探知性能d4を算出する探知性能算出部6、探知性能d4に基づきレーダ1それぞれが設定する監視覆域を計算する待ち受け組み合わせ計算部8、および待ち受け組み合わせ計算部8が計算した監視覆域の設定をレーダ1ごとに指示するレーダ統制部2を備えたことを特徴とする。なお、レーダ1は所定の監視覆域を設定でき、レーダ制御装置が決定した監視覆域を設定して監視するものであり、想定航跡とは目標物の軌道を予想したものである。
(もっと読む)
物体検知装置
【課題】 自車の進行方向の所定の検知領域に存在する制御対象物体を最小限の時間遅れで精度良く判定する。
【解決手段】 前回検知されたターゲットの位置および相対速から今回のターゲットの位置を予測し、その今回予測位置を中心として広い引継ぎエリア、中程度の3回目出力候補判定エリアおよび狭い2回目出力候補判定エリアを設定する。引継ぎエリア内で連続して検知されたターゲットが2回目の検知で2回目出力候補判定エリアに有れば、その時点でそのターゲットを制御対象物体と判定し、引継ぎエリア内で連続して検知されたターゲットが2回目および3回目の検知で共に3回目出力候補判定エリアに有れば、その時点でそのターゲットを制御対象物体と判定し、引継ぎエリア内でターゲットが4回連続して検知されれば、その時点でそのターゲットを制御対象物体と判定する。
(もっと読む)
物体検知装置
【課題】 物体を検知できなくなったときに該物体のデータを予測して補完する外挿処理の許可回数を適切に設定する。
【解決手段】 同一性判定手段M3は今回の検知時における予測された相対関係と算出された相対関係と比較することで、前回検知した物体および今回検知した物体の同一性を判定し、制御対象物体認識手段M4は同一であると判定された回数が判定回数に達した物体を制御対象物体であると認識する。その際に、外挿手段M5は、前回まで制御対象物体と認識されていた物体と同一であると判定される物体が検知されない場合に、相対関係予測手段M2により予測された物体を実際に検知されたものとして所定の外挿回数だけ外挿を行うとともに、同一性判定手段M3により同一であると判定された回数に比例して前記外挿回数を増加させるので、実際に物体をロストした場合に外挿が必要以上に継続されてロストした物体を対象とする不適切な制御が行われるのを防止することができる。
(もっと読む)
飛翔体誘導装置
【課題】飛翔体が最接近点から遠くても精度良く会合時間を計算することができ、更に、飛翔体が目標に再接近する前に目標形状を認識、目標半径を検出し、最接近点から遠くても精度よく直撃できるどうかを判定することのできる飛翔体誘導装置を提供する。
【解決手段】演算処理装置3が、飛翔体1の位置を基準とする相対座標系において、目標Tは等速直線運動するものとし、飛翔体1は等速加速度直線運動するものとして飛翔体1と目標Tとの会合点と会合時間を推定計算する。
(もっと読む)
状態変化検出装置および状態変化検出プログラム
【課題】監視対象の状態ベクトルを用い、F検定で状態変化を検出する方法では、観測対象が状態を変えてから観測者がその変化を検出するまでに多くの時間を要した。
【解決手段】監視対象の観測値と推定観測値との残差を計算し、監視対象が状態を変えていないモデルと、監視対象が状態を変えているモデルを定式化し、両者のAIC(赤池情報量規準)を演算して、AICが小さい側のモデルを、より尤もらしいと判断することで、短時間でも監視対象の状態変化を検出する事が可能となる。
(もっと読む)
車両用物体検出装置
【課題】物体の連続性を高精度に判定可能な物体検出装置を提供する。
【解決手段】物体の位置および速度を物体データとして検出するレーダ装置15と、レーダ装置15により前回検出された物体データに基づいて今回検出時の物体の位置を予測し、予測された位置を含むトラッキングエリア内に物体が検出された場合に前回検出された物体データと今回検出された物体データとの間に連続性があると判定するトラッキング処理部35と、レーダ装置15により前回検出された物体データおよび今回検出された物体データに基づいて物体の横移動量を算出する横移動量算出部33と、運転者の加速抑制意志または減速意志を検出する運転意志判断部34と、を備え、横移動量算出部33により算出された物体の横移動量が所定値以上であり且つ運転意志判断部34により運転者の加速抑制意志または減速意志が検出された場合にトラッキングエリアを変更する。
(もっと読む)
追尾装置
【課題】従来は、探知データが長時間途絶えた時、推定状態変数ベクトルとモデルにより予測処理を行うが予測誤差が大きい。また、トレンド推定を適用する場合、目標とのジオメトリにより運動モデルの次数変動や、探知データのばらつき具合で多項式の係数が変動する。
【解決手段】目標からの受信データより抽出された探知データから、目標の位置、速度等の運動諸元の推定と、受信データが一定時間以上途絶えた時にデータ間欠と判定する追尾フィルタ手段と、固定区間分の探知データを蓄積し、蓄積探知データより、1〜N次の固定区間フィッティングを並列に行い探知データのトレンドを推定するトレンド推定手段と、トレンド推定手段と追尾フィルタ手段の出力を入力し、追尾フィルタ手段が間欠追尾有効と判定時、モデル適合度が最小となるモデル次数により単位時刻先の予測値を出力する予測手段を備える。
(もっと読む)
目標追跡に関する改善策
目標を追跡する方法が、目標の観察を行うように動作可能な複数の検知ノードを備える非集中型ネットワークに適用される。該方法は、各ノードが複数のモデル追跡アルゴリズムを実行し、それによって各ノードに記憶されている追跡情報を更新するステップと、各ノードが更新された追跡情報をネットワーク内の選択された他のノードに通信するステップと、各ノードが別のノードから追跡情報を受け取ることに応えて、該受け取る追跡情報を局所追跡情報と保守的に融合するステップとを備える。一実施形態では、複数のモデル追跡アルゴリズムは、相互作用複数モデル追跡アルゴリズムである。  (もっと読む)
(もっと読む)
多目標追尾装置
【課題】許容可能な処理時間で、正確な追尾結果を得ることができる多目標追尾装置を得る。
【解決手段】予測計算を行う仮航跡と観測値の組み合わせを決定する観測値選別部1と、前記観測値選別部1により決定された仮航跡と観測値の組み合わせについて、仮航跡を観測値の時刻によって予測計算する予測処理部22と、仮航跡と観測値が対応付け可能かを、前記予測処理部22が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部23と、観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部24と、前記航跡尤度評価部24が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部25と、仮航跡の予測諸元と前記相関決定部25により対応付けられた観測値を使って平滑諸元を計算する平滑処理部26と、仮航跡のうち尤度が高いものを目標航跡とする航跡決定部27とを設けた。
(もっと読む)
目標物速度測定装置、目標物速度測定プログラム及び目標物速度測定方法
【課題】SAR(Synthetic Aperture Radar)画像に基づき、目標物の速度を高精度特定することを目的とする。
【解決手段】SAR搭載機の予測移動情報と目標物の移動情報とに基づいたSARと目標物との距離関係情報に基づき、SAR搭載機の速度を画像から推定する。また、SAR搭載機の速度を高次多項式で表現し、各次数の係数を画像から推定することで、より高精度なSAR搭載機の速度を得る。さらに、高精度なSAR搭載機の速度に基づくSAR搭載機の移動情報と目標物の予測移動情報とに基づいたSAR搭載機と目標物との距離関係情報に基づき、目標物の速度を画像から推定する。また、目標物の速度を高次多項式で表現し、各次数の係数を画像から推定することで、より高精度な目標物の速度を得る。
(もっと読む)
車両の衝突回避制御装置
【課題】モデル予測制御により、衝突を回避できる最適なルートを走行するためのアクチュエータの最適操作量を得る。
【解決手段】衝突回避制御装置は、自車の走行状態に関するデータとターゲットと自車間の距離およびターゲットの相対速度に関するデータとを記憶するデータベース部(6)と、データベース部(6)に記憶されたデータに基づいてターゲットの未来位置を予測するターゲット未来予測部(2)と、データベース部(6)に記憶されたデータに基づいて自車の未来位置を予測する自車未来予測部(3)と、ターゲットおよび自車の未来予測部出力に基づいて衝突の危険度を評価する衝突危険度評価部(4)と、衝突危険度評価部出力に基づいてモデル予測制御を行い、衝突回避のための自車のアクチュエータに関する最適操作量を検索する最適操作量検索部(5)を備える。
(もっと読む)
電波輻射制御装置
【課題】 逆探知される危険性があるため電波輻射禁止領域内でも、作戦遂行のため必要最小限の電波輻射については継続して行う。
【解決手段】 目標情報をリスト登録する目標情報データベースと、目標情報データベースから目標情報リストを取得する目標情報取得部と、目標情報取得部から送出される目標情報リストの目標種別から、自システムへの目標脅威度を判定し脅威度が所定基準以上の場合に目標情報リストを出力する脅威度判定部と、目標情報リストの観測時刻、目標速度から目標予測位置を算出する目標位置予測部と、電波輻射禁止範囲情報を電波輻射禁止範囲リストとして格納される電波輻射禁止範囲データベースと、電波輻射禁止範囲データベースから電波輻射禁止範囲リストを取得し、目標位置予測部から取得する目標予測目標位置と比較し、予測目標位置が電波輻射禁止範囲内の場合にこの禁止範囲を修正可能な電波輻射範囲制御部とを備えた。
(もっと読む)
追尾装置
【課題】航跡転送周期内の探知データについて、その圧縮時間を状況に応じて制御することにより、探知データ圧縮誤差を低減した追尾装置を得ることを目的とする。
【解決手段】本追尾装置は、センサ1から入力された探知データと目標航跡との相関をとる相関手段3と、相関手段3により相関付けされた探知データを入力し、追尾航跡を生成する追尾フィルタ手段4と、目標航跡と追尾航跡とを管理するトラックファイル100と、探知状況に応じて航跡転送周期内で圧縮時間を制御すると共に、相関付けされた探知データを圧縮時間単位で圧縮して航跡情報として転送する探知データ圧縮手段5とを備えている。
(もっと読む)
探知距離算出方法およびこれを用いたレーダシステム
【課題】算出される探知確率の誤差を小さくでき、しかも目標機の飛行回数を増やさずに、探知確率の信頼性を上げることができる探知距離算出方法。
【解決手段】目標を検出するレーダ装置の探知距離を算出する探知距離算出方法であって、検出された目標までの距離と信号強度比とから距離区間毎の信号強度比の平均値を求めることにより平均信号強度比を算出する区間毎平均信号強度比算出ステップと、算出された平均信号強度比から信号強度比を信号対雑音比に変換する信号強度比・信号対雑音比変換ステップと、変換により得られた信号対雑音比を、所定の距離における信号対雑音比に正規化する信号対雑音比正規化ステップと、正規化された信号対雑音比を探知確率に変換する信号対雑音比・探知確率変換ステップを含む。
(もっと読む)
車載用レーダ装置
【課題】前回の物標データと今回の物標データとの連続性を判定して物標データのペアリングを行い、正確に物標を捕捉できる車載用レーダ装置を提供する。
【解決手段】車載用の周波数変調連続波(FM−CW)レーダ装置であって、検出した過去の物標データと今回の物標データとの連続性の判定を、物標との距離差、相対速度差、及び横位置差の条件で行う連続性判定手段を有する車載用レーダ装置において、連続性判定手段が物標の連続性を判定する際に、物標との距離差と相対速度差の判定条件に加えて、前回と今回の物標が横位置差を満足するか、或いは、角度差を満足する条件から連続性を判断するようにさせた車載用レーダ装置である。この場合、物標までの距離が、所定値未満の場合には横位置差で物標の連続性を判定し、所定値以上の場合には角度差で連続性を判定するようにしても良い。
(もっと読む)
121 - 140 / 175
[ Back to top ]