
レーダ装置
【課題】自車と反射物体との相対距離や相対速度に関わらず、前方にある反射物体を自車が跨いで走行可能な低位置物体であると判別できるレーダ装置を提供する。
【解決手段】同定部17が同定した同一の反射物体について、記憶部16が記憶した今回の信号処理周期と直近の過去数回までの所定周期分の測定結果から得る相対距離および反射強度から相関係数を算出する相関係数算出部18と、相関係数算出部18が算出した相関係数が所定条件である場合に、反射物体5が低位置物体であると判別する低位置物体判別部19とを備える。
【解決手段】同定部17が同定した同一の反射物体について、記憶部16が記憶した今回の信号処理周期と直近の過去数回までの所定周期分の測定結果から得る相対距離および反射強度から相関係数を算出する相関係数算出部18と、相関係数算出部18が算出した相関係数が所定条件である場合に、反射物体5が低位置物体であると判別する低位置物体判別部19とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自車に搭載されたレーダ装置と該レーダ装置から送信された電波を反射する物体(反射物体)との相対距離や相対速度、反射物体の水平方向角度あるいは反射物体で反射される電波の反射強度などを測定する装置に係わり、特に、自車前方の反射物体が、自車が跨いで走行可能な低位置物体であるか否かを判別可能なレーダ装置に関する。
【背景技術】
【0002】
従来から、レーダ装置によって測定される「自車と反射物体との相対距離や相対速度」、「反射物体の水平方向角度」あるいは「反射物体で反射される電波の反射強度」などの測定結果は、「自車と自車走行車線上の前方車両との車間距離を一定に保つ車間距離制御システム」、「渋滞環境下で前方車両に追従走行を行う低車速追従走行システム」、「車間距離制御システムの機能を停止制御まで拡張した全車速域車間距離制御システム」、「前方車両に追突する可能性がある場合、自動的に緊急制動を行い、追突被害を軽減する衝突被害軽減ブレーキシステム」などのような、ドライバの運転負荷軽減、利便性向上、危険に対する注意喚起、事故回避、被害軽減などを狙った走行支援システムで活用されている。
【0003】
一般に、このような走行支援システムで使用されるレーダ装置は、反射物体の水平方向(左右方向)の角度は測定するが、垂直方向(上下方向)方向の角度は測定しないため、反射物体の垂直方向の角度を測定するためのアンテナやビームの方向を切り替える機構が不要となり、構成を簡単化でき、コストも抑えることができるという特長を持つ。
【0004】
しかしながら、上述した従来のレーダ装置は、「反射物体の垂直方向の角度である高さ情報」を得ることができないため、「自車が跨いで走行可能な空き缶、鉄板、マンホール蓋、道路鋲(キャッツアイ)、ポールなどの低位置物体」と「自車が跨いで走行不可能な車両、大型障害物などの非低位置物体」とを判別することができない。このため、前方の反射物体が、「低位置物体であるか」あるいは「非低位置物体であるか」にかかわらず、車両の走行支援システムが作動し、運転者に違和感を与えかねないという課題があった。
【0005】
そこで、特開2010−162975号公報(特許文献1)に示された従来技術では、レーダ装置で検出した反射物体の反射強度が閾値より強く、画像センサによる反射物体画像が探索空間の下部領域以外の撮影画像から検出された場合に、反射物体を低位置物体であると判別し、走行支援システムの作動を回避している。
【0006】
また、特許第3966673号公報(特許文献2)に示された従来技術では、レーダ装置で検出した反射物体の中から「静止物」を抽出し、抽出された「静止物」の中から「自車の予想進路上にある反射物体」を抽出し、抽出された「自車の予想進路上にある反射物体」の中から「中遠距離での反射強度のばらつきが第1閾値以下の反射物体」を抽出し、抽出された「中遠距離での反射強度のばらつきが第1閾値以下の反射物体」の中から「至近距離での反射強度の減少率が第2閾値以下であり、且つ反射強度が第3閾値以下である反射物体」を抽出する。そして、この抽出された反射物体(すなわち、至近距離での反射強度の減少率が第2閾値以下であり、且つ反射強度が第3閾値以下である反射物体)を低位置物体であると判別し、走行支援システムの作動を中止あるいは緩和している。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2010−162975号公報
【特許文献2】特許第3966673号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、従来技術には、以下のような課題がある。
すなわち、特許文献1に記載されたレーダ装置では、上述したように、反射強度そのものの強弱を低位置物体か否かの判定指標の一つとしている。しかし、元来、レーダ装置で測定される反射強度は、反射物体の材質や形状によって異なるため、反射強度そのものの強弱のみを判定指標とすることは望ましくない。
例えば、低位置物体の中でも鉄板やマンホール蓋などの金属製の反射物体は反射強度が強いため、車両などの非低位置物体と同等の反射強度になる場合があり、一方で、非低位置物体の中でも人やバイクなどの反射物体は反射強度が弱いため、空き缶などの低位置物体と同等の反射強度になる場合がある。
【0009】
また、反射強度は路面マルチパスによっても変化しうる。路面マルチパスとは、「レーダ装置から電波が送信され、直接反射物体に当たってレーダ装置で受信される電波」と「一度路面に反射してからレーダ装置で受信される電波」との干渉によって生じる現象であって、レーダ装置と反射物体との相対距離に依存して反射物体の反射強度を変動させる。
一般に、反射物体の高さが高いほど、レーダ装置で送信した電波が一度路面に反射してからレーダ装置で受信されやすいため、路面マルチパスによる影響が大きく、一方で、反射物体の高さが低いほど、路面マルチパスによる影響は小さい。特に、反射物体の高さが0mm(路面)の場合、路面マルチパスの影響はない。
このため、車両等の反射物体の高さが高い反射物体の場合、反射強度は路面マルチパスにより大きく変動しやすく、レーダ装置と反射物体との相対距離によっては、車両などの非低位置物体の反射強度の方が、空き缶などの低位置物体の反射強度よりも弱くなる場合もある。
さらに言えば、レーダ装置の個体差などによっても反射強度は変化しうる。
【0010】
このように、反射強度そのものの強弱は変化しうるため、特許文献1の方法では、反射強度そのものの強弱だけでなく、画像センサによる反射物体画像が探索空間の下部領域以外の撮影画像から検出された場合、反射物体を低位置物体であると判別し、走行支援システムの作動を回避している。
しかし、この方法ではレーダ装置と画像センサを組み合わせた複雑な構成となり、コストが嵩むという課題がある。
【0011】
一方、特許文献2の方法では、反射強度そのものではなく、高さが高い反射物体が路面マルチパスによる影響を受けて反射強度が大きく変動する点に着目して、反射強度のばらつきという反射強度の相対的な特徴から低位置物体であるか否かを判別している。
そのため、レーダ装置単体で得られる反射物体の測定結果のみから低位置物体であるか否かを判別することができるものの、反射強度のばらつきを算出するためには、レーダ装置で検出された各々の反射物体に対して、過去の信号処理周期での相対距離と反射強度を長期間蓄積する必要があり、メモリなどの記憶領域を圧迫するという課題があった。
また、至近距離での反射強度の減少率を算出する必要があるため、至近距離まで低位置物体であるか否かを判別できず、走行支援システムが作動してしまう可能性がある。
【0012】
この発明は、上記のような課題を解決するためになされたものであり、レーダ装置単体で得られる反射物体の測定結果のうち、今回の信号処理周期と直近の過去数回までの所定信号処理周期での相対距離と反射強度の線型性(後述する相関係数あるいは残差)から、反射物体が低位置物体であるか非低位置物体であるかを判別することができるレーダ装置を提供する目的とする。
【課題を解決するための手段】
【0013】
この発明に係るレーダ装置は、車両に搭載されて、周辺に存在する反射物体に関する反射物体情報を測定して出力するレーダ装置であって、所定の信号処理周期で、前記反射物体情報である自車と前記反射物体との相対距離と相対速度、および前記反射物体の水平方向角度と反射強度を測定する測定部と、今回の信号処理周期と直近の過去数回までの所定周期分、前記測定部が測定した測定結果を記憶する記憶部と、前記記憶部が記憶した前記所定周期分の測定結果から、時系列で同一の反射物体を同定する同定部と、前記同定部が同定した同一の反射物体について、前記記憶部が記憶した今回の信号処理周期と直近の過去数回までの所定周期分の測定結果から得る前記相対距離および反射強度から相関係数を算出する相関係数算出部と、前記相関係数算出部が算出した前記相関係数が所定条件である場合に、前記反射物体が低位置物体であると判別する低位置物体判別部とを備えるものである。
【0014】
また、この発明に係るレーダ装置は、車両に搭載されて、周辺に存在する反射物体に関する反射物体情報を測定して出力するレーダ装置であって、所定の信号処理周期で、前記反射物体情報である自車と前記反射物体との相対距離と相対速度、および前記反射物体の水平方向角度と反射強度を測定する測定部と、今回の信号処理周期と直近の過去数回までの所定周期分、前記測定部が測定した測定結果を記憶する記憶部と、前記記憶部が記憶した前記所定周期分の測定結果から、時系列で同一の反射物体を同定する同定部と、前記同定部が同定した同一の反射物体について、前記記憶部が記憶した今回の信号処理周期と直近の過去数回までの所定周期分の測定結果から得る前記相対距離および反射強度から最小二乗法を用いて一次式を求め、前記一次式との残差を算出する残差算出部と、前記残差算出部が算出した前記残差が所定条件である場合に、前記反射物体が低位置物体であると判別する低位置物体判別部とを備えるものである。
【発明の効果】
【0015】
この発明によれば、相関係数算出部が算出した相関係数あるいは残差算出部が算出した残差が所定条件である場合に、反射物体が低位置物体であると判別するので、自車と反射物体との相対距離や相対速度に関わらず、レーダ装置単体で、前方にある反射物体を自車が跨いで走行することが可能な低位置物体であると判別できる。
【図面の簡単な説明】
【0016】
【図1】実施の形態1に係わるレーダ装置の構成を示すブロック図である。
【図2】実施の形態1に係わるレーダ方程式による相対距離と反射強度との関係を表すグラフである。
【図3】実施の形態1に係わる垂直ビームパターンによる反射強度係数と垂直方向角度との関係を表すグラフである。
【図4】実施の形態1に係わる垂直ビームパターンによる反射強度係数を組み入れた場合の相対距離と反射強度との関係を表すグラフである。
【図5】実施の形態1に係わるマルチパスおよび垂直ビームパターンによる反射強度係数を組み入れた場合の相対距離と反射強度との関係を表すグラフである。
【図6】実施の形態1に係わるレーダ装置による処理内容の前半を表すフローチャートである。
【図7】実施の形態1に係わるレーダ装置による処理内容の後半を表すフローチャートである。
【図8】実施の形態2に係わるレーダ装置のブロック図である。
【図9】実施の形態2に係わるレーダ装置による処理内容の前半を表すフローチャートである。
【図10】実施の形態2に係わるレーダ装置による処理内容の後半を表すフローチャートである。
【発明を実施するための形態】
【0017】
以下、図面に基づいて本発明に係るレーダ装置の一実施の形態例について説明する。
なお、図1と図8において、同一符号は同一または相当でものあることを表す。
実施の形態1.
この発明の実施の形態1に係るレーダ装置について、図1から図7までを参照しながら説明する。
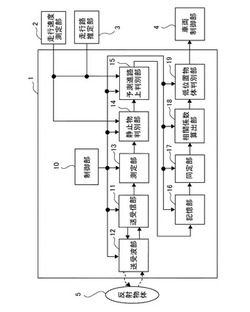
図1は、本発明の実施の形態1によるレーダ装置の構成を示すブロック図である。
図1において、1はレーダ装置、2は走行速度測定部、3は走行路推定部、4は車両制御部、5は反射物体である。
また、10は制御部、11は送受信部、12は送受波部、13は測定部、14は静止物判別部、15は予測進路上判別部、16は記憶部、17は同定部、18は相関係数算出部、19は低位置物体判別部である。
【0018】
制御部10は、例えば、専用のロジック回路、汎用のCPU(Central Processing Unit)内のプログラム、あるいは両者の組み合わせで構成され、以下で述べるようにレーダ
装置1の各構成要素(すなわち、送受信部11、・・・測定部13、・・・低位置物体判別部19など)の動作タイミングなどを制御する。
送受信部11と送受波部(アンテナ)12は、制御部10の制御により、送受信部11で生成された送信信号が、送受波部12で送信電波として空間に送波され、反射物体5などで反射した電波を送受波部12が受波し、送受信部11が受信信号に変換する。
【0019】
制御部10で「受信信号の入力タイミングや測定結果の出力タイミング」が制御される測定部13は、制御部10と同様に、専用のロジック回路、汎用のCPU、DSP(Digital Signal Processor)内のプログラム、あるいは両者の組み合わせで構成されている。
そして、測定部13は、使用するレーダ方式や測角方式に対応する測定用信号処理を実施し、レーダ装置1と反射物体5の相対距離Dstと相対速度Vlc(接近方向が負)、および反射物体の水平方向角度Aglと反射強度Ampなどの「反射物体情報」を測定結果として得る。
なお、送受信部11で生成された送信信号は、送受波部12によって送信電波として空間に送波され、反射物体5などで反射される。反射物体5で反射した電波は、送受波部12で受波し、送受信部11でデジタルデータの受信信号に変換される。その後、デジタルデータに変換され受信信号は、測定部13に入力される。
【0020】
なお、相対距離Dst、相対速度Vlc、反射強度Amを測定するため、送受信部11は、レーダ方式として公知であるFMCW(Frequency Modulated Continuous Wave)方式や、パ
ルスドップラー方式などが実現できるよう構成され、制御部10が送受信のタイミングなどを制御する。
また、水平方向角度Aglを測定するため、送受波部12は、測角方式として公知である
「モノパルス測角方式用に水平方向について送受電波の向きが変えられる機構」や「アレー信号処理測角方式用に複数の送波、受波素子」などを備え、制御部10が、送受電波の向きの制御や、複数素子での送波や受波のタイミングなどを制御する。
【0021】
測定部13からは、全ての反射物体5(反射物体5は1個とは限らない)に関する測定結果(相対距離Dst、相対速度Vlc、反射物体の水平方向角度Agl、反射強度Amp)が静止物判別部14へ出力される。
静止物判別部14は、走行速度測定部2により得られたレーダ搭載車両(すなわち、自車)の走行速度Vselfと測定部13により得られた反射物体5との相対速度Vlcから、「反射物体5が停止物であるか否か」を判別する。
具体的には、反射物体5の対地速度Vearthを以下の式(1)で算出し、Vearthの絶対値が所定値(例えば1km/h)以下の反射物体5を静止物であると判別する。
【0022】
【数1】

【0023】
さらに、予測進路上判別部15は、走行速度測定部2と走行路推定部3により得られた自車の予測進路から、反射物体5が自車の予測進路上に存在するか否かを判別する。
具体的には、レーダ搭載車両の走行速度Vself、ヨーレート、ステアリングホイールの
操舵角、横方向加速度などから自車の予測進路を算出する。
【0024】
また、反射物体5が静止物判別部14により静止物と判別され、且つ予測進路上判別部15により自車の予測進路上に存在すると判別された場合、反射物体5の測定結果(すなわち、レーダ装置1と反射物体5の相対距離Dstと相対速度Vlc、および反射物体の水平方向角度Aglと反射強度Amp)は、制御部10の制御により記憶部16へ出力される。
記憶部16は、制御部10の制御により今回の信号処理周期と直近の過去数回までの所定周期分、反射物体5の測定結果(相対距離Dst、相対速度Vlc、反射物体の水平方向角度Agl、反射強度Amp)を記憶する。
そして、記憶部16からは、静止物判別部14で静止物と判別され、予測進路上判別部15で予測進路上に存在する判別された反射物体5のみの測定結果が同定部17に出力される。
【0025】
次に、同定部17は、記憶部16により記憶した前回の信号処理周期の測定結果と今回の信号処理周期の測定結果から、時系列で同一の反射物体5を同定する。
この同定は、毎回の信号処理周期(例えば100msec)毎に実施し、同一の反射物体5を同定し続ける。
具体的には、記憶部16に記憶した所定周期分の測定結果において、前回の信号処理周期の測定結果から今回の予測値を予測(例えば線型予測法にて)し、予測値と今回の信号処理周期の測定結果との差が最も小さい反射物体を同一の反射物体であると判断する。
時系列で同一の反射物体5であると判断されたものには、毎回の信号処理周期で同じ反射物体番号IDが割り当てられる。なお、同定部17で実施される処理は、同一の反射物体を毎回の信号処理周期で同定できる方法であれば、他の方法であっても良い。
【0026】
制御部10は、同定部17の処理を終えた後で、相関係数算出部18、低位置物体判別部19を順に制御し、反射物体5が低位置物体であるか否かを判別する。
まず、相関係数算出部18は、同定部17により同じIDが割り当てられた反射物体5について、測定周期(検出回数)が所定値(例えば10回)以上の場合、反射強度が相対距離の二乗に反比例すること(レーダ方程式)およびレーダ装置1の垂直ビームパターンに比例することを利用して、測定結果の相対距離、反射強度から相関係数(ピアソンの積率相関係数)を算出する。
具体的には、同定部17により同じIDが割り当てられた反射物体5について、今回の信号処理周期と直近の過去n回までの所定周期(合計n+1回)で得られた測定結果である相対距離Dsti、(i=0,1,2,3,…,n)、反射強度Ampi、(i=0,1,2,3,…,n)から、相関係数r
を以下の式(2)で算出する。
【0027】
【数2】
【0028】
式(2)において、“上線付のDst”および“上線付のAmp”は、それぞれDsti,Ampiの
相加平均であり、相関係数rは、Dsti,Ampiの共分散を夫々の標準偏差で割ったものに等しい。
なお、i=0の場合が今回の信号処理周期で得られた測定結果である。
【0029】
ここで、相関係数算出部18で算出する相関係数について詳細に説明する。
ある反射物体5の反射強度は、レーダ方程式によりレーダ装置1と反射物体5との相対距離の二乗に反比例する。例えば、レーダ装置1の搭載高さを600mm(乗用車のフロントグリル周辺と仮定)、反射物体5の高さを600mmとした場合について、横軸をレーダ装置1と反射物体5との相対距離、縦軸を反射強度として表すと、図2で示したグラフになる。なお、距離60mにおける反射物体5の反射強度を0dBとした。
【0030】
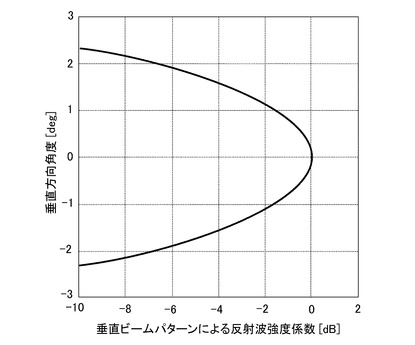
次に、レーダ装置1と反射物体5との垂直方向角度が0deg(すなわち、レーダ装置1の搭載高さと反射物体5の高さが同じ)である角度を基準とし、他の垂直方向角度(上向きが正)における反射強度が、図3の垂直ビームパターンで表されるレーダ装置1を想定する。
なお、レーダ装置1と反射物体5との垂直方向角度が0degである角度を基準とした他の垂直方向角度の反射強度を、垂直ビームパターンによる反射強度係数と呼ぶこととする。
【0031】
図3に示すように、垂直ビームパターンによる反射強度係数は、レーダ装置1と反射物体5との垂直方向角度に伴って変化する。レーダ装置1と反射物体5との垂直方向角度が0.0degの場合、垂直ビームパターンによる反射強度係数は、0.0dBで、レーダ装置1と反射物体5との垂直方向角度が−2.0deg(下向き)の場合、垂直ビームパターンによる反射強度係数は、−6.7dBとなる。
よって、レーダ装置1と反射物体5との反射強度は、レーダ装置1と反射物体5との相対距離の二乗に反比例する値へ、レーダ装置1と反射物体5との垂直方向角度に伴う垂直ビームパターンによる反射強度係数を組み入れなければならない。例えば、レーダ装置1の搭載高さを600mm、反射物体5の高さを600mm、0mm(路面)の2種類とした場合について、横軸をレーダ装置と反射物体5との相対距離、縦軸を反射強度として表すと、図4のようになる。
【0032】
図4に示すように、レーダ装置1の搭載高さと反射物体5の高さが同じ場合は、レーダ装置1と反射物体5との垂直方向角度が0degなので、垂直ビームパターンによる反射強度係数が0dBとなり、反射物体5の反射強度は、反射物体5との相対距離の二乗に反比例する。
一方、レーダ装置1の搭載高さと反射物体5の高さが異なる場合は、レーダ装置1と反射物体5との垂直方向角度が相対距離により異なるため、垂直ビームパターンによる反射強度係数も相対距離により異なり、反射物体5の反射強度は、相対距離が近づくにつれて線型に増加し、ある相対距離で急激に減少する。
例えば、相対距離が17.1mで反射物体5の高さが0mmの場合、レーダ装置1と反射物体5との垂直方向角度が−2.0degのため、反射物体5の高さが600mmの反射強度と比べ、−6.7dBとなっている。
【0033】
ところで、反射物体5の反射強度は路面マルチパスにより変化する。一般に、反射物体5の高さが高いほどレーダ装置1で送信した電波が一度路面に反射してからレーダ装置1で受信されやすいため、路面マルチパスによる影響が大きく、一方で、反射物体5の高さが低いほど路面マルチパスによる影響は小さい。特に、反射物体5の高さが0mm(路面)の場合、路面マルチパスの影響はない。
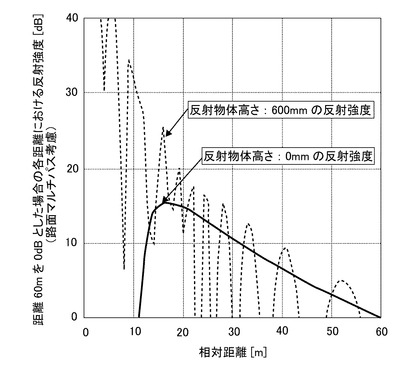
このため、車両などの反射物体5の高さが高い反射物体5の場合、反射物体5の反射強度は路面マルチパスを考慮しなければならない。例えば、レーダ装置1の搭載高さを600mm、反射物体5の高さを600mm、0mmの2種類とした場合について、横軸をレーダ装置1と反射物体5との相対距離、縦軸を反射強度(路面マルチパス考慮)として表すと、図5のようになる。
【0034】
図5に示すように、反射物体5の高さが600mmで、路面マルチパスの影響が大きい場合、反射物体5の反射強度は、相対距離が近づくにつれて大きく変動する。一方、反射物体5の高さが0mmの場合、反射物体5の反射強度は、相対距離が近づくにつれ、線型に増加する(〜20m)関係がある。
また、図には示していないが、反射物体5の高さが100mm程度以下の低位置物体の場合も同様、路面マルチパスの影響が少なく、相対距離が近づくにつれ、ほぼ線型に増加する(〜20m)関係がある。
【0035】
以上より、反射物体5の高さが600mmで、路面マルチパスの影響が大きい場合は、相関係数は、相対距離が近づくにつれ、大きく変動するため、0に近い値となる。
一方、反射物体5の高さが100mm程度以下の低位置物体の場合、相対距離が近づくにつれ、ほぼ線型に増加(〜20m)するため、相関係数は負の相関となり、−1に近い値となる。
次に、低位置物体判別部19では、同じIDが割り当てられた反射物体5について、相関係数算出部18で算出した相関係数が所定範囲(例えば−0.9から―1.0まで)である場合、反射物体5が低位置物体であると判別する。
最後に、低位置物体か否かを判別された反射物体5は、車両制御部4に出力され、車両制御部4は、反射物体5が低位置物体の場合、走行支援システムの作動を中止あるいは緩和する。
【0036】
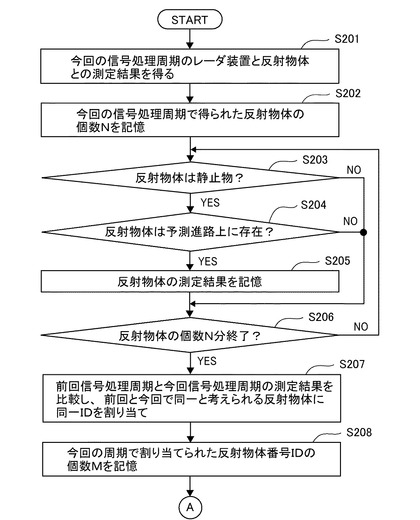
以下、図6および図7のフローチャートを参照しながら、この発明の実施の形態1に係るレーダ装置1の動作について詳細に説明する。
なお、図6は、実施の形態1に係わるレーダ装置による処理内容の前半を表すフローチャートであり、図7は、実施の形態1に係わるレーダ装置による処理内容の後半を表すフローチャートである。
図6を参照して、ステップS101〜ステップS108の処理について説明する。
まず、送受信部11、送受波部12、測定部13の処理によって、使用するレーダ方式や測角方式に対応する測定用信号処理を実施して、今回の信号処理周期のレーダ装置1と反射物体5との測定結果を得る(ステップS101)。
ここで、測定部13の処理によって、今回の信号処理周期で得られた反射物体5の個数Nをカウントして記憶する(ステップS102)。なお、反射物体の個数Nをカウントして記憶するのは、反射物体が1個とは限らないためである。
【0037】
続いて、静止物判定部14の処理によって、今回の信号処理周期で得られた反射物体5が静止物であるか否かを判定する(ステップS103)。
ステップS103において、反射物体5が静止物(すなわち、Yes)と判定された場合には、ステップS104に進む。一方、ステップS103において、反射物体5が静止物でない(すなわち、No)と判定された場合には、ステップS106に進む。
次に、予測進路上判別部15の処理によって、今回の信号処理周期で得られた反射物体5が自車の予測進路上に存在するか否かを判定する(ステップS104)。
ステップS104において、反射物体5が自車の予測進路上に存在する(すなわち、Yes)と判定された場合には、ステップS105に進む。
一方、ステップS104において、自車の予測進路上に存在しない(すなわち、No)と判定された場合には、ステップS106に進む。
【0038】
次に、記憶部16の処理によって、今回の信号処理周期で静止物、且つ自車の予測進路上と判定された測定結果を記憶する(ステップS105)。
なお、記憶部16は、今回の信号処理周期と直近の過去数回までの所定周期分、測定部13による測定結果を記憶することができるものとする。
ここで、測定部13の処理によって、ステップS102でカウントした「今回の信号処理周期で得られた反射物体5の個数N」分の処理が終了したか否かを判定する(ステップS106)。
ステップS106において、処理が終了した(すなわち、Yes)と判定された場合には、ステップS107に進む。
一方、ステップS106において、処理が終了していない(すなわち、No)と判定された場合には、ステップS103に戻って、ステップS103〜ステップS106の処理が繰り返し実行される。
【0039】
続いて、同定部17の処理によって、前回の信号処理周期と今回の信号処理周期の測定結果から時系列で同一反射物体5であると考えられるものを同定する。
なお、時系列で同一反射物体5であると判断されたものには、毎回の信号処理周期で同じ反射物体番号IDを割り当てる(ステップS107)。
ここで、同定部17の処理によって、今回の信号処理周期で割り当てられた反射物体番号IDの個数Mをカウントして記憶する(ステップS108)。
なお、反射物体番号IDの個数Mをカウントして記憶するのは、反射物体番号IDが1個とは限らないためである。
【0040】
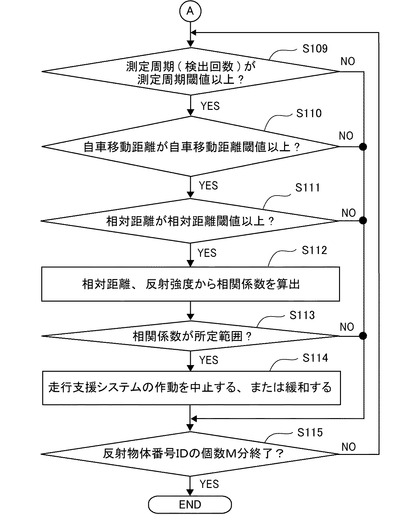
次に、図7を参照して、ステップS108の処理に続いてステップS109〜ステップS115の処理について説明する。
同定部17の処理によって、同じ反射物体番号IDが割り当てられた反射物体5について、測定周期(検出回数)が測定周期閾値以上であるか否かを判定する(ステップS109)。
測定周期が少ないと、誤差の影響が大きく、低位置物体であると判別する精度が十分に得られないため、ステップS109は、低位置物体であると判別する精度を確保するために必要な条件である。
ステップS109において、測定周期が測定周期閾値以上(すなわち、Yes)と判定された場合には、ステップS110に進む。
一方、ステップS109において、測定周期が測定周期閾値以上でない(すなわち、No)と判定された場合には、ステップS115に進む。
【0041】
次に、同定部17の処理によって、同じ反射物体番号IDが割り当てられた反射物体5について、反射物体5を初めて測定した信号処理周期から自車移動距離が自車移動距離閾値以上であるか否かを判定する(ステップS110)。
自車移動距離が十分でない場合は、反射強度の相対距離に対する変化を十分に測定できず、低位置物体の判別を誤る恐れがある。そのため、ステップS110はこのような判別
誤りを防ぐために必要な判定条件である。
なお、自車の移動した距離は、走行速度測定部2により得られたレーダ搭載車両の走行速度と反射物体5をはじめて測定した信号処理周期からの経過時間によって計算される。
ステップS110において、自車移動距離が自車移動距離閾値以上(すなわち、Yes)と判定された場合には、ステップS111に進む。一方、ステップS110において、自車移動距離が自車移動距離閾値以上でない(すなわち、No)と判定された場合には、ステップS115に進む。
【0042】
次に、同定部17の処理によって、同じ反射物体番号IDが割り当てられた反射物体5について、反射物体5を最後に測定した信号処理周期の相対距離が相対距離閾値以上であるか否かを判定する(ステップS111)。
相対距離が相対距離閾値以下であると、反射強度は相対距離が近づくにつれ、急激に減少する。すなわち、相関係数が負の相関でなく、−1から大きく乖離して、低位置物体の判別を誤る恐れがあるため、ステップS111はこのような判別誤りを防ぐために必要な判定条件である。
ステップS111において、相対距離が相対距離閾値以上(すなわち、Yes)と判定された場合には、ステップS112に進む。一方、ステップS111において、相対距離が相対距離閾値以上でない(すなわち、No)と判定された場合には、ステップS115に進む。
【0043】
なお、図7のフローチャートには記載していないが、ノイズフロアによる影響が大きければ反射物体5の反射強度対ノイズフロア比(信号対雑音比(SN比))が小さいため、反射物体5のSN比がSN比閾値以下の場合には、ステップS112へ進まないようにすることも、低位置物体であると判別する精度を向上するために有効な手段である。
【0044】
次に、相関係数算出部18の処理によって、同じ反射物体番号IDが割り当てられた反射物体5について、今回の信号処理周期と直近の過去数回までの所定周期で得られた測定結果の相対距離、反射強度から相関係数を算出する(ステップS112)。
続いて、低位置物体判別部19の処理によって、同じ反射物体番号IDが割り当てられた反射物体5について、ステップS112で算出した相関係数が所定範囲であるか否かを判定する(ステップS113)。
ステップS113において、相関係数が所定範囲内(すなわち、Yes)と判定された場合には、ステップS114に進む。一方、ステップS113において、相関係数が所定範囲外(すなわち、No)と判定された場合には、ステップS115に進む。
【0045】
最後に、車両制御部4の処理によって、同じ反射物体番号IDが割り当てられた反射物体5について、低位置物体と判別された場合、走行支援システムの作動を中止または緩和する(ステップS114)。
ここで、ステップS108でカウントした、今回の信号処理周期で割り当てられた反射物体番号IDの個数M分の処理が終了したか否かを判定する(ステップS115)。
ステップS115において、処理が終了した(すなわち、Yes)と判定された場合には、図7の処理を終了する。一方、ステップS115において、処理が終了していない(すなわち、No)と判定された場合には、ステップS109に戻って、ステップS109〜ステップS114の処理が繰り返し実行される。
このような処理により、反射物体5が低位置物体であるか非低位置物体であるかを判別することができる。
【0046】
以上説明したように、実施の形態1によるレーダ装置は、車両に搭載されて、周辺に存在する反射物体5に関する反射物体情報を測定して出力するレーダ装置であって、
所定の信号処理周期で、前記反射物体情報である自車と反射物体5との相対距離と相対
速度、および反射物体5の水平方向角度と反射強度を測定する測定部13と、今回の信号処理周期と直近の過去数回までの所定周期分、測定部13が測定した測定結果を記憶する記憶部16と、記憶部16が記憶した前記所定周期分の測定結果から、時系列で同一の反射物体を同定する同定部17と、同定部17が同定した同一の反射物体について、記憶部16が記憶した今回の信号処理周期と直近の過去数回までの所定周期分の測定結果から得る前記相対距離および反射強度から相関係数を算出する相関係数算出部18と、相関係数算出部18が算出した相関係数が所定条件である場合に、反射物体5が低位置物体であると判別する低位置物体判別部19とを備える。
これにより、自車と反射物体との相対距離や相対速度に関わらず、レーダ装置単体で前方にある反射物体を自車が跨いで走行することが可能な低位置物体であると判別することができる。
【0047】
また、実施の形態1によるレーダ装置は、さらに、自車の走行速度を測定する走行速度測定部2と、走行速度測定部2により得られた自車の走行速度と測定部13により得られた反射物体5との相対速度から反射物体5の対地速度を算出し、算出結果に基づいて反射物体5が静止物であるか否かを判別する静止物判別部14とを備え、記憶部16は、静止物判別部14により静止物として判別された場合に、今回の信号処理周期と直近の過去数回までの所定周期分、測定部13が測定した測定結果を記憶する。
これにより、記憶部の記憶領域を節約できる。
【0048】
また、実施の形態1によるレーダ装置は、さらに、自車の予測進路を予測する走行路推定部3と、反射物体5が走行路推定部3により得られた自車の予測進路上に存在するか否かを判別する予測進路上判別部15とを備え、記憶部16は、予測進路上判別部15により自車の予測進路上に反射物体5が存在すると判別された場合に、今回の信号処理周期と直近の過去数回までの所定周期分、測定部13が測定した測定結果を記憶する。
これにより、記憶部の記憶領域を節約できる。
【0049】
また、実施の形態1によるレーダ装置においては、相関係数算出部18は、反射物体5の検出回数が測定周期閾値以上の場合に相関係数を算出し、測定周期閾値以下では相関係数を算出しない。
また、相関係数算出部18は、自車移動距離が自車移動距離閾値以上の場合に相関係数を算出し、自車移動距離閾値以下では相関係数を算出しない。
また、相関係数算出部18は、反射物体5との相対距離が相対距離閾値以上の場合に相関係数を算出し、相対距離閾値以下では相関係数を算出しない。
また、相関係数算出部18は、反射物体5の反射強度の信号対雑音比が信号対雑音比閾値以上の場合に相関係数を算出し、信号対雑音比閾値以下では相関係数を算出しない。
これらにより、低位置物体判別部による低位置物体判別の信頼性向上が図れる。
【0050】
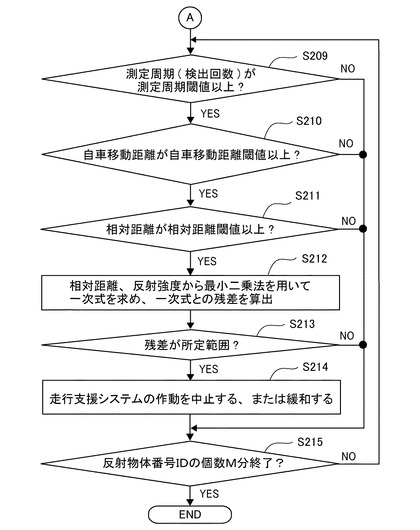
実施の形態2.
この発明の実施の形態2に係るレーダ装置について、図8〜図10を参照しながら説明する。
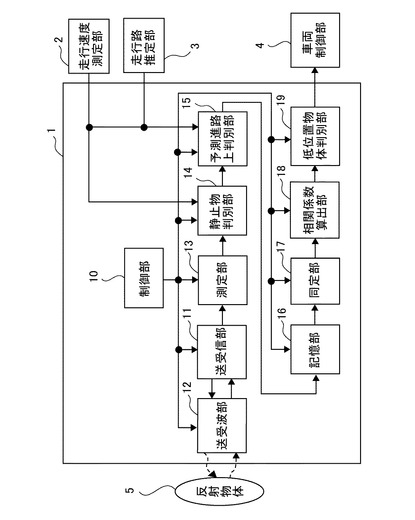
図8は、本発明の実施の形態2によるレーダ装置の構成を示すブロック図である。
図9は、実施の形態2に係わるレーダ装置による処理内容の前半を表すフローチャートであり、図10は、実施の形態2に係わるレーダ装置による処理内容の後半を表すフローチャートである。
前述した実施の形態1では、同じ反射物体番号IDが割り当てられた反射物体5について、今回の信号処理周期と直近の過去数回までの所定信号処理周期の相対距離と反射強度の線型性を判別する指標として、相関係数を用いた場合について説明した。
実施の形態2では、線型性を判別する指標として、最小二乗法により算出した一次式との残差を用いた場合について説明する。
【0051】
図8において、28は残差算出部であり、その他は、実施の形態1の図1と同じ構成であり、その説明を省略する。
残差算出部28は、同定部17により同じIDが割り当てられた反射物体5について、測定周期(検出回数)が所定値(例えば10回)以上の場合、測定結果の相対距離、反射強度から最小二乗法を用いて一次式を求め、求めた一次式との残差を算出する。
具体的には、同定部17により同じIDが割り当てられた反射物体5について、今回の信号処理周期と直近の過去n回までの所定周期(合計n+1回)で得られた測定結果の相対距離Dsti、(i=0,1,2,3,…,n)、反射強度Ampi、(i=0,1,2,3,…,n)から残差Sを以下の順
に算出する。
まず、求める一次方程式をAmp = a×Dst +bとおくと、aとbは、次の式(3)で求め
られる。
【0052】
【数3】
【0053】
【数4】
【0054】
次に、残差S(S>0)は、次の式(5)で求められる。
【0055】
【数5】
【0056】
なお、i=0の場合が、今回の信号処理周期で得られた測定結果である。
【0057】
次に、低位置物体判別部19では、同じIDが割り当てられた反射物体5について、残差算出部28で算出した残差が所定値(例えば0.1以下)である場合、反射物体5が低位置物体であると判別する。
最後に、低位置物体か否かを判別された反射物体5は、車両制御部4に出力され、車両制御部4は、反射物体5が低位置物体の場合、走行支援システムの作動を中止あるいは緩和する。
【0058】
以下、図9および図10のフローチャートを参照しながら、この発明の実施の形態2に係るレーダ装置1の動作について具体的に説明する。
図9および図10において、ステップS201〜S211は、実施の形態1のステップS101〜S111と同じであり、その説明を省略する。
ステップS211に続いて、残差算出部28の処理によって、同じ反射物体番号IDが割り当てられた反射物体5について、今回の信号処理周期と直近の過去数回までの所定周期で得られた測定結果の相対距離、反射強度から最小二乗法を用いて一次式を求め、求めた一次式との残差を算出する(ステップS212)。
【0059】
続いて、低位置物体判別部19の処理によって、同じ反射物体番号IDが割り当てられた反射物体5について、ステップS212で算出した残差が所定範囲であるか否かを判定する(ステップS213)。
ステップS213において、残差が所定範囲内(すなわち、Yes)と判定された場合には、ステップS214に進む。一方、ステップS213において、残差が所定範囲外(すなわち、No)と判定された場合には、ステップS215に進む。
ステップS214〜S215は、ステップS114〜S115と同じであり、その説明を省略する。
【0060】
このように、相関係数算出部18(実施の形態1)に代えて残差算出部28を用いても、反射物体5が低位置物体であるか非低位置物体であるかを判別することができる。
なお、上記実施の形態で挙げた、今回の信号処理周期と直近の過去数回までの所定周期、対地速度閾値、測定周期(検出回数)閾値、自車移動距離閾値、相関係数の所定範囲、残差の所定範囲、SN比閾値などの各種値はそれぞれ、図3に示すレーダ装置1のビームパターン、レーダ装置1の固体差、レーダ装置1の検出性能などを基に適宜設定される値である。
【0061】
以上説明したように、実施の形態2によるレーダ装置は、車両に搭載されて、周辺に存在する反射物体に関する反射物体情報を測定して出力するレーダ装置であって、
所定の信号処理周期で、前記反射物体情報である自車と反射物体5との相対距離と相対速度、および反射物体5の水平方向角度と反射強度を測定する測定部13と、今回の信号処理周期と直近の過去数回までの所定周期分、測定部13が測定した測定結果を記憶する記憶部16と、記憶部16が記憶した前記所定周期分の測定結果から、時系列で同一の反射物体を同定する同定部17と、同定部17が同定した同一の反射物体について、記憶部16が記憶した今回の信号処理周期と直近の過去数回までの所定周期分の測定結果から得る前記相対距離および反射強度から最小二乗法を用いて一次式を求め、前記一次式との残差を算出する残差算出部28と、残差算出部28が算出した前記残差が所定条件である場合に、反射物体5が低位置物体であると判別する低位置物体判別部19とを備える。
これにより、自車と反射物体との相対距離や相対速度に関わらず、レーダ装置単体で前方にある反射物体を自車が跨いで走行することが可能な低位置物体であると判別することができる。
【0062】
また、実施の形態2によるレーダ装置は、さらに、自車の走行速度を測定する走行速度測定部2と、走行速度測定部2により得られた自車の走行速度と測定部13により得られた反射物体5との相対速度から反射物体5の対地速度を算出し、算出結果に基づいて反射物体5が静止物であるか否かを判別する静止物判別部14とを備え、記憶部16は、静止物判別部14により静止物として判別された場合に、今回の信号処理周期と直近の過去数回までの所定周期分、測定部13が測定した測定結果を記憶する。
これにより、記憶部の記憶領域を節約できる。
【0063】
また、実施の形態2によるレーダ装置は、さらに、自車の予測進路を予測する走行路推定部2と、反射物体5が走行路推定部2により得られた自車の予測進路上に存在するか否かを判別する予測進路上判別部15とを備え、記憶部16は、予測進路上判別部15により自車の予測進路上に反射物体5が存在すると判別された場合に、今回の信号処理周期と直近の過去数回までの所定周期分、測定部13が測定した測定結果を記憶する。
これにより、記憶部の記憶領域を節約できる。
【0064】
また、実施の形態2によるレーダ装置においては、残差算出部28は、反射物体5の検出回数が測定周期閾値以上の場合に残差を算出し、測定周期閾値以下では残差を算出しない。
また、残差算出部28は、自車移動距離が自車移動距離閾値以上の場合に残差を算出し、自車移動距離閾値以下では残差を算出しない。
また、残差算出部28は、反射物体5との相対距離が相対距離閾値以上の場合に残差を算出し、相対距離閾値以下では残差を算出しない。
また、残差算出部28は、反射物体5の反射強度の信号対雑音比が信号対雑音比閾値以上の場合に残差を算出し、信号対雑音比閾値以下では残差を算出しない。
これらにより、低位置物体判別部による低位置物体判別の信頼性向上が図れる。
【0065】
以上、実施の形態1および実施の形態2の2例について説明したが、本発明は、その要旨を逸脱しない範囲で種々の設計変更を加えることができる。
例えば、レーダ装置の搭載高さを600mmとしたが、本発明はレーダ装置の搭載高さをこの範囲に限定するものではなく、レーダ装置の搭載高さが既知であれば他の高さでもよい。
また、線型性を判別する指標として、相関係数や最小二乗法により算出した一次式との残差としたが、線型性を判別する指標であれば、他の方法でも良い。
さらに、測定結果の相対距離、反射強度から相関係数や最小二乗法により算出した一次式との残差を算出したが、測定結果の相対距離、SN比から算出しても良い。
【産業上の利用可能性】
【0066】
本発明は、自車と反射物体との相対距離や相対速度に関わらず、前方にある反射物体を自車が跨いで走行することが可能な低位置物体であると判別できるレーダ装置の実現に有用である。
【符号の説明】
【0067】
1 レーダ装置 2 走行速度測定部 3 走行路推定部、
4 車両制御部 5 反射物体 10 制御部
11 送受信部 12 送受波部 13 測定部
14 静止物判別部 15 予測進路上判別部 16 記憶部
17 同定部 18 相関係数算出部 19 低位置物体判別部
28 残差算出部
【技術分野】
【0001】
本発明は、自車に搭載されたレーダ装置と該レーダ装置から送信された電波を反射する物体(反射物体)との相対距離や相対速度、反射物体の水平方向角度あるいは反射物体で反射される電波の反射強度などを測定する装置に係わり、特に、自車前方の反射物体が、自車が跨いで走行可能な低位置物体であるか否かを判別可能なレーダ装置に関する。
【背景技術】
【0002】
従来から、レーダ装置によって測定される「自車と反射物体との相対距離や相対速度」、「反射物体の水平方向角度」あるいは「反射物体で反射される電波の反射強度」などの測定結果は、「自車と自車走行車線上の前方車両との車間距離を一定に保つ車間距離制御システム」、「渋滞環境下で前方車両に追従走行を行う低車速追従走行システム」、「車間距離制御システムの機能を停止制御まで拡張した全車速域車間距離制御システム」、「前方車両に追突する可能性がある場合、自動的に緊急制動を行い、追突被害を軽減する衝突被害軽減ブレーキシステム」などのような、ドライバの運転負荷軽減、利便性向上、危険に対する注意喚起、事故回避、被害軽減などを狙った走行支援システムで活用されている。
【0003】
一般に、このような走行支援システムで使用されるレーダ装置は、反射物体の水平方向(左右方向)の角度は測定するが、垂直方向(上下方向)方向の角度は測定しないため、反射物体の垂直方向の角度を測定するためのアンテナやビームの方向を切り替える機構が不要となり、構成を簡単化でき、コストも抑えることができるという特長を持つ。
【0004】
しかしながら、上述した従来のレーダ装置は、「反射物体の垂直方向の角度である高さ情報」を得ることができないため、「自車が跨いで走行可能な空き缶、鉄板、マンホール蓋、道路鋲(キャッツアイ)、ポールなどの低位置物体」と「自車が跨いで走行不可能な車両、大型障害物などの非低位置物体」とを判別することができない。このため、前方の反射物体が、「低位置物体であるか」あるいは「非低位置物体であるか」にかかわらず、車両の走行支援システムが作動し、運転者に違和感を与えかねないという課題があった。
【0005】
そこで、特開2010−162975号公報(特許文献1)に示された従来技術では、レーダ装置で検出した反射物体の反射強度が閾値より強く、画像センサによる反射物体画像が探索空間の下部領域以外の撮影画像から検出された場合に、反射物体を低位置物体であると判別し、走行支援システムの作動を回避している。
【0006】
また、特許第3966673号公報(特許文献2)に示された従来技術では、レーダ装置で検出した反射物体の中から「静止物」を抽出し、抽出された「静止物」の中から「自車の予想進路上にある反射物体」を抽出し、抽出された「自車の予想進路上にある反射物体」の中から「中遠距離での反射強度のばらつきが第1閾値以下の反射物体」を抽出し、抽出された「中遠距離での反射強度のばらつきが第1閾値以下の反射物体」の中から「至近距離での反射強度の減少率が第2閾値以下であり、且つ反射強度が第3閾値以下である反射物体」を抽出する。そして、この抽出された反射物体(すなわち、至近距離での反射強度の減少率が第2閾値以下であり、且つ反射強度が第3閾値以下である反射物体)を低位置物体であると判別し、走行支援システムの作動を中止あるいは緩和している。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2010−162975号公報
【特許文献2】特許第3966673号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、従来技術には、以下のような課題がある。
すなわち、特許文献1に記載されたレーダ装置では、上述したように、反射強度そのものの強弱を低位置物体か否かの判定指標の一つとしている。しかし、元来、レーダ装置で測定される反射強度は、反射物体の材質や形状によって異なるため、反射強度そのものの強弱のみを判定指標とすることは望ましくない。
例えば、低位置物体の中でも鉄板やマンホール蓋などの金属製の反射物体は反射強度が強いため、車両などの非低位置物体と同等の反射強度になる場合があり、一方で、非低位置物体の中でも人やバイクなどの反射物体は反射強度が弱いため、空き缶などの低位置物体と同等の反射強度になる場合がある。
【0009】
また、反射強度は路面マルチパスによっても変化しうる。路面マルチパスとは、「レーダ装置から電波が送信され、直接反射物体に当たってレーダ装置で受信される電波」と「一度路面に反射してからレーダ装置で受信される電波」との干渉によって生じる現象であって、レーダ装置と反射物体との相対距離に依存して反射物体の反射強度を変動させる。
一般に、反射物体の高さが高いほど、レーダ装置で送信した電波が一度路面に反射してからレーダ装置で受信されやすいため、路面マルチパスによる影響が大きく、一方で、反射物体の高さが低いほど、路面マルチパスによる影響は小さい。特に、反射物体の高さが0mm(路面)の場合、路面マルチパスの影響はない。
このため、車両等の反射物体の高さが高い反射物体の場合、反射強度は路面マルチパスにより大きく変動しやすく、レーダ装置と反射物体との相対距離によっては、車両などの非低位置物体の反射強度の方が、空き缶などの低位置物体の反射強度よりも弱くなる場合もある。
さらに言えば、レーダ装置の個体差などによっても反射強度は変化しうる。
【0010】
このように、反射強度そのものの強弱は変化しうるため、特許文献1の方法では、反射強度そのものの強弱だけでなく、画像センサによる反射物体画像が探索空間の下部領域以外の撮影画像から検出された場合、反射物体を低位置物体であると判別し、走行支援システムの作動を回避している。
しかし、この方法ではレーダ装置と画像センサを組み合わせた複雑な構成となり、コストが嵩むという課題がある。
【0011】
一方、特許文献2の方法では、反射強度そのものではなく、高さが高い反射物体が路面マルチパスによる影響を受けて反射強度が大きく変動する点に着目して、反射強度のばらつきという反射強度の相対的な特徴から低位置物体であるか否かを判別している。
そのため、レーダ装置単体で得られる反射物体の測定結果のみから低位置物体であるか否かを判別することができるものの、反射強度のばらつきを算出するためには、レーダ装置で検出された各々の反射物体に対して、過去の信号処理周期での相対距離と反射強度を長期間蓄積する必要があり、メモリなどの記憶領域を圧迫するという課題があった。
また、至近距離での反射強度の減少率を算出する必要があるため、至近距離まで低位置物体であるか否かを判別できず、走行支援システムが作動してしまう可能性がある。
【0012】
この発明は、上記のような課題を解決するためになされたものであり、レーダ装置単体で得られる反射物体の測定結果のうち、今回の信号処理周期と直近の過去数回までの所定信号処理周期での相対距離と反射強度の線型性(後述する相関係数あるいは残差)から、反射物体が低位置物体であるか非低位置物体であるかを判別することができるレーダ装置を提供する目的とする。
【課題を解決するための手段】
【0013】
この発明に係るレーダ装置は、車両に搭載されて、周辺に存在する反射物体に関する反射物体情報を測定して出力するレーダ装置であって、所定の信号処理周期で、前記反射物体情報である自車と前記反射物体との相対距離と相対速度、および前記反射物体の水平方向角度と反射強度を測定する測定部と、今回の信号処理周期と直近の過去数回までの所定周期分、前記測定部が測定した測定結果を記憶する記憶部と、前記記憶部が記憶した前記所定周期分の測定結果から、時系列で同一の反射物体を同定する同定部と、前記同定部が同定した同一の反射物体について、前記記憶部が記憶した今回の信号処理周期と直近の過去数回までの所定周期分の測定結果から得る前記相対距離および反射強度から相関係数を算出する相関係数算出部と、前記相関係数算出部が算出した前記相関係数が所定条件である場合に、前記反射物体が低位置物体であると判別する低位置物体判別部とを備えるものである。
【0014】
また、この発明に係るレーダ装置は、車両に搭載されて、周辺に存在する反射物体に関する反射物体情報を測定して出力するレーダ装置であって、所定の信号処理周期で、前記反射物体情報である自車と前記反射物体との相対距離と相対速度、および前記反射物体の水平方向角度と反射強度を測定する測定部と、今回の信号処理周期と直近の過去数回までの所定周期分、前記測定部が測定した測定結果を記憶する記憶部と、前記記憶部が記憶した前記所定周期分の測定結果から、時系列で同一の反射物体を同定する同定部と、前記同定部が同定した同一の反射物体について、前記記憶部が記憶した今回の信号処理周期と直近の過去数回までの所定周期分の測定結果から得る前記相対距離および反射強度から最小二乗法を用いて一次式を求め、前記一次式との残差を算出する残差算出部と、前記残差算出部が算出した前記残差が所定条件である場合に、前記反射物体が低位置物体であると判別する低位置物体判別部とを備えるものである。
【発明の効果】
【0015】
この発明によれば、相関係数算出部が算出した相関係数あるいは残差算出部が算出した残差が所定条件である場合に、反射物体が低位置物体であると判別するので、自車と反射物体との相対距離や相対速度に関わらず、レーダ装置単体で、前方にある反射物体を自車が跨いで走行することが可能な低位置物体であると判別できる。
【図面の簡単な説明】
【0016】
【図1】実施の形態1に係わるレーダ装置の構成を示すブロック図である。
【図2】実施の形態1に係わるレーダ方程式による相対距離と反射強度との関係を表すグラフである。
【図3】実施の形態1に係わる垂直ビームパターンによる反射強度係数と垂直方向角度との関係を表すグラフである。
【図4】実施の形態1に係わる垂直ビームパターンによる反射強度係数を組み入れた場合の相対距離と反射強度との関係を表すグラフである。
【図5】実施の形態1に係わるマルチパスおよび垂直ビームパターンによる反射強度係数を組み入れた場合の相対距離と反射強度との関係を表すグラフである。
【図6】実施の形態1に係わるレーダ装置による処理内容の前半を表すフローチャートである。
【図7】実施の形態1に係わるレーダ装置による処理内容の後半を表すフローチャートである。
【図8】実施の形態2に係わるレーダ装置のブロック図である。
【図9】実施の形態2に係わるレーダ装置による処理内容の前半を表すフローチャートである。
【図10】実施の形態2に係わるレーダ装置による処理内容の後半を表すフローチャートである。
【発明を実施するための形態】
【0017】
以下、図面に基づいて本発明に係るレーダ装置の一実施の形態例について説明する。
なお、図1と図8において、同一符号は同一または相当でものあることを表す。
実施の形態1.
この発明の実施の形態1に係るレーダ装置について、図1から図7までを参照しながら説明する。
図1は、本発明の実施の形態1によるレーダ装置の構成を示すブロック図である。
図1において、1はレーダ装置、2は走行速度測定部、3は走行路推定部、4は車両制御部、5は反射物体である。
また、10は制御部、11は送受信部、12は送受波部、13は測定部、14は静止物判別部、15は予測進路上判別部、16は記憶部、17は同定部、18は相関係数算出部、19は低位置物体判別部である。
【0018】
制御部10は、例えば、専用のロジック回路、汎用のCPU(Central Processing Unit)内のプログラム、あるいは両者の組み合わせで構成され、以下で述べるようにレーダ
装置1の各構成要素(すなわち、送受信部11、・・・測定部13、・・・低位置物体判別部19など)の動作タイミングなどを制御する。
送受信部11と送受波部(アンテナ)12は、制御部10の制御により、送受信部11で生成された送信信号が、送受波部12で送信電波として空間に送波され、反射物体5などで反射した電波を送受波部12が受波し、送受信部11が受信信号に変換する。
【0019】
制御部10で「受信信号の入力タイミングや測定結果の出力タイミング」が制御される測定部13は、制御部10と同様に、専用のロジック回路、汎用のCPU、DSP(Digital Signal Processor)内のプログラム、あるいは両者の組み合わせで構成されている。
そして、測定部13は、使用するレーダ方式や測角方式に対応する測定用信号処理を実施し、レーダ装置1と反射物体5の相対距離Dstと相対速度Vlc(接近方向が負)、および反射物体の水平方向角度Aglと反射強度Ampなどの「反射物体情報」を測定結果として得る。
なお、送受信部11で生成された送信信号は、送受波部12によって送信電波として空間に送波され、反射物体5などで反射される。反射物体5で反射した電波は、送受波部12で受波し、送受信部11でデジタルデータの受信信号に変換される。その後、デジタルデータに変換され受信信号は、測定部13に入力される。
【0020】
なお、相対距離Dst、相対速度Vlc、反射強度Amを測定するため、送受信部11は、レーダ方式として公知であるFMCW(Frequency Modulated Continuous Wave)方式や、パ
ルスドップラー方式などが実現できるよう構成され、制御部10が送受信のタイミングなどを制御する。
また、水平方向角度Aglを測定するため、送受波部12は、測角方式として公知である
「モノパルス測角方式用に水平方向について送受電波の向きが変えられる機構」や「アレー信号処理測角方式用に複数の送波、受波素子」などを備え、制御部10が、送受電波の向きの制御や、複数素子での送波や受波のタイミングなどを制御する。
【0021】
測定部13からは、全ての反射物体5(反射物体5は1個とは限らない)に関する測定結果(相対距離Dst、相対速度Vlc、反射物体の水平方向角度Agl、反射強度Amp)が静止物判別部14へ出力される。
静止物判別部14は、走行速度測定部2により得られたレーダ搭載車両(すなわち、自車)の走行速度Vselfと測定部13により得られた反射物体5との相対速度Vlcから、「反射物体5が停止物であるか否か」を判別する。
具体的には、反射物体5の対地速度Vearthを以下の式(1)で算出し、Vearthの絶対値が所定値(例えば1km/h)以下の反射物体5を静止物であると判別する。
【0022】
【数1】
【0023】
さらに、予測進路上判別部15は、走行速度測定部2と走行路推定部3により得られた自車の予測進路から、反射物体5が自車の予測進路上に存在するか否かを判別する。
具体的には、レーダ搭載車両の走行速度Vself、ヨーレート、ステアリングホイールの
操舵角、横方向加速度などから自車の予測進路を算出する。
【0024】
また、反射物体5が静止物判別部14により静止物と判別され、且つ予測進路上判別部15により自車の予測進路上に存在すると判別された場合、反射物体5の測定結果(すなわち、レーダ装置1と反射物体5の相対距離Dstと相対速度Vlc、および反射物体の水平方向角度Aglと反射強度Amp)は、制御部10の制御により記憶部16へ出力される。
記憶部16は、制御部10の制御により今回の信号処理周期と直近の過去数回までの所定周期分、反射物体5の測定結果(相対距離Dst、相対速度Vlc、反射物体の水平方向角度Agl、反射強度Amp)を記憶する。
そして、記憶部16からは、静止物判別部14で静止物と判別され、予測進路上判別部15で予測進路上に存在する判別された反射物体5のみの測定結果が同定部17に出力される。
【0025】
次に、同定部17は、記憶部16により記憶した前回の信号処理周期の測定結果と今回の信号処理周期の測定結果から、時系列で同一の反射物体5を同定する。
この同定は、毎回の信号処理周期(例えば100msec)毎に実施し、同一の反射物体5を同定し続ける。
具体的には、記憶部16に記憶した所定周期分の測定結果において、前回の信号処理周期の測定結果から今回の予測値を予測(例えば線型予測法にて)し、予測値と今回の信号処理周期の測定結果との差が最も小さい反射物体を同一の反射物体であると判断する。
時系列で同一の反射物体5であると判断されたものには、毎回の信号処理周期で同じ反射物体番号IDが割り当てられる。なお、同定部17で実施される処理は、同一の反射物体を毎回の信号処理周期で同定できる方法であれば、他の方法であっても良い。
【0026】
制御部10は、同定部17の処理を終えた後で、相関係数算出部18、低位置物体判別部19を順に制御し、反射物体5が低位置物体であるか否かを判別する。
まず、相関係数算出部18は、同定部17により同じIDが割り当てられた反射物体5について、測定周期(検出回数)が所定値(例えば10回)以上の場合、反射強度が相対距離の二乗に反比例すること(レーダ方程式)およびレーダ装置1の垂直ビームパターンに比例することを利用して、測定結果の相対距離、反射強度から相関係数(ピアソンの積率相関係数)を算出する。
具体的には、同定部17により同じIDが割り当てられた反射物体5について、今回の信号処理周期と直近の過去n回までの所定周期(合計n+1回)で得られた測定結果である相対距離Dsti、(i=0,1,2,3,…,n)、反射強度Ampi、(i=0,1,2,3,…,n)から、相関係数r
を以下の式(2)で算出する。
【0027】
【数2】
【0028】
式(2)において、“上線付のDst”および“上線付のAmp”は、それぞれDsti,Ampiの
相加平均であり、相関係数rは、Dsti,Ampiの共分散を夫々の標準偏差で割ったものに等しい。
なお、i=0の場合が今回の信号処理周期で得られた測定結果である。
【0029】
ここで、相関係数算出部18で算出する相関係数について詳細に説明する。
ある反射物体5の反射強度は、レーダ方程式によりレーダ装置1と反射物体5との相対距離の二乗に反比例する。例えば、レーダ装置1の搭載高さを600mm(乗用車のフロントグリル周辺と仮定)、反射物体5の高さを600mmとした場合について、横軸をレーダ装置1と反射物体5との相対距離、縦軸を反射強度として表すと、図2で示したグラフになる。なお、距離60mにおける反射物体5の反射強度を0dBとした。
【0030】
次に、レーダ装置1と反射物体5との垂直方向角度が0deg(すなわち、レーダ装置1の搭載高さと反射物体5の高さが同じ)である角度を基準とし、他の垂直方向角度(上向きが正)における反射強度が、図3の垂直ビームパターンで表されるレーダ装置1を想定する。
なお、レーダ装置1と反射物体5との垂直方向角度が0degである角度を基準とした他の垂直方向角度の反射強度を、垂直ビームパターンによる反射強度係数と呼ぶこととする。
【0031】
図3に示すように、垂直ビームパターンによる反射強度係数は、レーダ装置1と反射物体5との垂直方向角度に伴って変化する。レーダ装置1と反射物体5との垂直方向角度が0.0degの場合、垂直ビームパターンによる反射強度係数は、0.0dBで、レーダ装置1と反射物体5との垂直方向角度が−2.0deg(下向き)の場合、垂直ビームパターンによる反射強度係数は、−6.7dBとなる。
よって、レーダ装置1と反射物体5との反射強度は、レーダ装置1と反射物体5との相対距離の二乗に反比例する値へ、レーダ装置1と反射物体5との垂直方向角度に伴う垂直ビームパターンによる反射強度係数を組み入れなければならない。例えば、レーダ装置1の搭載高さを600mm、反射物体5の高さを600mm、0mm(路面)の2種類とした場合について、横軸をレーダ装置と反射物体5との相対距離、縦軸を反射強度として表すと、図4のようになる。
【0032】
図4に示すように、レーダ装置1の搭載高さと反射物体5の高さが同じ場合は、レーダ装置1と反射物体5との垂直方向角度が0degなので、垂直ビームパターンによる反射強度係数が0dBとなり、反射物体5の反射強度は、反射物体5との相対距離の二乗に反比例する。
一方、レーダ装置1の搭載高さと反射物体5の高さが異なる場合は、レーダ装置1と反射物体5との垂直方向角度が相対距離により異なるため、垂直ビームパターンによる反射強度係数も相対距離により異なり、反射物体5の反射強度は、相対距離が近づくにつれて線型に増加し、ある相対距離で急激に減少する。
例えば、相対距離が17.1mで反射物体5の高さが0mmの場合、レーダ装置1と反射物体5との垂直方向角度が−2.0degのため、反射物体5の高さが600mmの反射強度と比べ、−6.7dBとなっている。
【0033】
ところで、反射物体5の反射強度は路面マルチパスにより変化する。一般に、反射物体5の高さが高いほどレーダ装置1で送信した電波が一度路面に反射してからレーダ装置1で受信されやすいため、路面マルチパスによる影響が大きく、一方で、反射物体5の高さが低いほど路面マルチパスによる影響は小さい。特に、反射物体5の高さが0mm(路面)の場合、路面マルチパスの影響はない。
このため、車両などの反射物体5の高さが高い反射物体5の場合、反射物体5の反射強度は路面マルチパスを考慮しなければならない。例えば、レーダ装置1の搭載高さを600mm、反射物体5の高さを600mm、0mmの2種類とした場合について、横軸をレーダ装置1と反射物体5との相対距離、縦軸を反射強度(路面マルチパス考慮)として表すと、図5のようになる。
【0034】
図5に示すように、反射物体5の高さが600mmで、路面マルチパスの影響が大きい場合、反射物体5の反射強度は、相対距離が近づくにつれて大きく変動する。一方、反射物体5の高さが0mmの場合、反射物体5の反射強度は、相対距離が近づくにつれ、線型に増加する(〜20m)関係がある。
また、図には示していないが、反射物体5の高さが100mm程度以下の低位置物体の場合も同様、路面マルチパスの影響が少なく、相対距離が近づくにつれ、ほぼ線型に増加する(〜20m)関係がある。
【0035】
以上より、反射物体5の高さが600mmで、路面マルチパスの影響が大きい場合は、相関係数は、相対距離が近づくにつれ、大きく変動するため、0に近い値となる。
一方、反射物体5の高さが100mm程度以下の低位置物体の場合、相対距離が近づくにつれ、ほぼ線型に増加(〜20m)するため、相関係数は負の相関となり、−1に近い値となる。
次に、低位置物体判別部19では、同じIDが割り当てられた反射物体5について、相関係数算出部18で算出した相関係数が所定範囲(例えば−0.9から―1.0まで)である場合、反射物体5が低位置物体であると判別する。
最後に、低位置物体か否かを判別された反射物体5は、車両制御部4に出力され、車両制御部4は、反射物体5が低位置物体の場合、走行支援システムの作動を中止あるいは緩和する。
【0036】
以下、図6および図7のフローチャートを参照しながら、この発明の実施の形態1に係るレーダ装置1の動作について詳細に説明する。
なお、図6は、実施の形態1に係わるレーダ装置による処理内容の前半を表すフローチャートであり、図7は、実施の形態1に係わるレーダ装置による処理内容の後半を表すフローチャートである。
図6を参照して、ステップS101〜ステップS108の処理について説明する。
まず、送受信部11、送受波部12、測定部13の処理によって、使用するレーダ方式や測角方式に対応する測定用信号処理を実施して、今回の信号処理周期のレーダ装置1と反射物体5との測定結果を得る(ステップS101)。
ここで、測定部13の処理によって、今回の信号処理周期で得られた反射物体5の個数Nをカウントして記憶する(ステップS102)。なお、反射物体の個数Nをカウントして記憶するのは、反射物体が1個とは限らないためである。
【0037】
続いて、静止物判定部14の処理によって、今回の信号処理周期で得られた反射物体5が静止物であるか否かを判定する(ステップS103)。
ステップS103において、反射物体5が静止物(すなわち、Yes)と判定された場合には、ステップS104に進む。一方、ステップS103において、反射物体5が静止物でない(すなわち、No)と判定された場合には、ステップS106に進む。
次に、予測進路上判別部15の処理によって、今回の信号処理周期で得られた反射物体5が自車の予測進路上に存在するか否かを判定する(ステップS104)。
ステップS104において、反射物体5が自車の予測進路上に存在する(すなわち、Yes)と判定された場合には、ステップS105に進む。
一方、ステップS104において、自車の予測進路上に存在しない(すなわち、No)と判定された場合には、ステップS106に進む。
【0038】
次に、記憶部16の処理によって、今回の信号処理周期で静止物、且つ自車の予測進路上と判定された測定結果を記憶する(ステップS105)。
なお、記憶部16は、今回の信号処理周期と直近の過去数回までの所定周期分、測定部13による測定結果を記憶することができるものとする。
ここで、測定部13の処理によって、ステップS102でカウントした「今回の信号処理周期で得られた反射物体5の個数N」分の処理が終了したか否かを判定する(ステップS106)。
ステップS106において、処理が終了した(すなわち、Yes)と判定された場合には、ステップS107に進む。
一方、ステップS106において、処理が終了していない(すなわち、No)と判定された場合には、ステップS103に戻って、ステップS103〜ステップS106の処理が繰り返し実行される。
【0039】
続いて、同定部17の処理によって、前回の信号処理周期と今回の信号処理周期の測定結果から時系列で同一反射物体5であると考えられるものを同定する。
なお、時系列で同一反射物体5であると判断されたものには、毎回の信号処理周期で同じ反射物体番号IDを割り当てる(ステップS107)。
ここで、同定部17の処理によって、今回の信号処理周期で割り当てられた反射物体番号IDの個数Mをカウントして記憶する(ステップS108)。
なお、反射物体番号IDの個数Mをカウントして記憶するのは、反射物体番号IDが1個とは限らないためである。
【0040】
次に、図7を参照して、ステップS108の処理に続いてステップS109〜ステップS115の処理について説明する。
同定部17の処理によって、同じ反射物体番号IDが割り当てられた反射物体5について、測定周期(検出回数)が測定周期閾値以上であるか否かを判定する(ステップS109)。
測定周期が少ないと、誤差の影響が大きく、低位置物体であると判別する精度が十分に得られないため、ステップS109は、低位置物体であると判別する精度を確保するために必要な条件である。
ステップS109において、測定周期が測定周期閾値以上(すなわち、Yes)と判定された場合には、ステップS110に進む。
一方、ステップS109において、測定周期が測定周期閾値以上でない(すなわち、No)と判定された場合には、ステップS115に進む。
【0041】
次に、同定部17の処理によって、同じ反射物体番号IDが割り当てられた反射物体5について、反射物体5を初めて測定した信号処理周期から自車移動距離が自車移動距離閾値以上であるか否かを判定する(ステップS110)。
自車移動距離が十分でない場合は、反射強度の相対距離に対する変化を十分に測定できず、低位置物体の判別を誤る恐れがある。そのため、ステップS110はこのような判別
誤りを防ぐために必要な判定条件である。
なお、自車の移動した距離は、走行速度測定部2により得られたレーダ搭載車両の走行速度と反射物体5をはじめて測定した信号処理周期からの経過時間によって計算される。
ステップS110において、自車移動距離が自車移動距離閾値以上(すなわち、Yes)と判定された場合には、ステップS111に進む。一方、ステップS110において、自車移動距離が自車移動距離閾値以上でない(すなわち、No)と判定された場合には、ステップS115に進む。
【0042】
次に、同定部17の処理によって、同じ反射物体番号IDが割り当てられた反射物体5について、反射物体5を最後に測定した信号処理周期の相対距離が相対距離閾値以上であるか否かを判定する(ステップS111)。
相対距離が相対距離閾値以下であると、反射強度は相対距離が近づくにつれ、急激に減少する。すなわち、相関係数が負の相関でなく、−1から大きく乖離して、低位置物体の判別を誤る恐れがあるため、ステップS111はこのような判別誤りを防ぐために必要な判定条件である。
ステップS111において、相対距離が相対距離閾値以上(すなわち、Yes)と判定された場合には、ステップS112に進む。一方、ステップS111において、相対距離が相対距離閾値以上でない(すなわち、No)と判定された場合には、ステップS115に進む。
【0043】
なお、図7のフローチャートには記載していないが、ノイズフロアによる影響が大きければ反射物体5の反射強度対ノイズフロア比(信号対雑音比(SN比))が小さいため、反射物体5のSN比がSN比閾値以下の場合には、ステップS112へ進まないようにすることも、低位置物体であると判別する精度を向上するために有効な手段である。
【0044】
次に、相関係数算出部18の処理によって、同じ反射物体番号IDが割り当てられた反射物体5について、今回の信号処理周期と直近の過去数回までの所定周期で得られた測定結果の相対距離、反射強度から相関係数を算出する(ステップS112)。
続いて、低位置物体判別部19の処理によって、同じ反射物体番号IDが割り当てられた反射物体5について、ステップS112で算出した相関係数が所定範囲であるか否かを判定する(ステップS113)。
ステップS113において、相関係数が所定範囲内(すなわち、Yes)と判定された場合には、ステップS114に進む。一方、ステップS113において、相関係数が所定範囲外(すなわち、No)と判定された場合には、ステップS115に進む。
【0045】
最後に、車両制御部4の処理によって、同じ反射物体番号IDが割り当てられた反射物体5について、低位置物体と判別された場合、走行支援システムの作動を中止または緩和する(ステップS114)。
ここで、ステップS108でカウントした、今回の信号処理周期で割り当てられた反射物体番号IDの個数M分の処理が終了したか否かを判定する(ステップS115)。
ステップS115において、処理が終了した(すなわち、Yes)と判定された場合には、図7の処理を終了する。一方、ステップS115において、処理が終了していない(すなわち、No)と判定された場合には、ステップS109に戻って、ステップS109〜ステップS114の処理が繰り返し実行される。
このような処理により、反射物体5が低位置物体であるか非低位置物体であるかを判別することができる。
【0046】
以上説明したように、実施の形態1によるレーダ装置は、車両に搭載されて、周辺に存在する反射物体5に関する反射物体情報を測定して出力するレーダ装置であって、
所定の信号処理周期で、前記反射物体情報である自車と反射物体5との相対距離と相対
速度、および反射物体5の水平方向角度と反射強度を測定する測定部13と、今回の信号処理周期と直近の過去数回までの所定周期分、測定部13が測定した測定結果を記憶する記憶部16と、記憶部16が記憶した前記所定周期分の測定結果から、時系列で同一の反射物体を同定する同定部17と、同定部17が同定した同一の反射物体について、記憶部16が記憶した今回の信号処理周期と直近の過去数回までの所定周期分の測定結果から得る前記相対距離および反射強度から相関係数を算出する相関係数算出部18と、相関係数算出部18が算出した相関係数が所定条件である場合に、反射物体5が低位置物体であると判別する低位置物体判別部19とを備える。
これにより、自車と反射物体との相対距離や相対速度に関わらず、レーダ装置単体で前方にある反射物体を自車が跨いで走行することが可能な低位置物体であると判別することができる。
【0047】
また、実施の形態1によるレーダ装置は、さらに、自車の走行速度を測定する走行速度測定部2と、走行速度測定部2により得られた自車の走行速度と測定部13により得られた反射物体5との相対速度から反射物体5の対地速度を算出し、算出結果に基づいて反射物体5が静止物であるか否かを判別する静止物判別部14とを備え、記憶部16は、静止物判別部14により静止物として判別された場合に、今回の信号処理周期と直近の過去数回までの所定周期分、測定部13が測定した測定結果を記憶する。
これにより、記憶部の記憶領域を節約できる。
【0048】
また、実施の形態1によるレーダ装置は、さらに、自車の予測進路を予測する走行路推定部3と、反射物体5が走行路推定部3により得られた自車の予測進路上に存在するか否かを判別する予測進路上判別部15とを備え、記憶部16は、予測進路上判別部15により自車の予測進路上に反射物体5が存在すると判別された場合に、今回の信号処理周期と直近の過去数回までの所定周期分、測定部13が測定した測定結果を記憶する。
これにより、記憶部の記憶領域を節約できる。
【0049】
また、実施の形態1によるレーダ装置においては、相関係数算出部18は、反射物体5の検出回数が測定周期閾値以上の場合に相関係数を算出し、測定周期閾値以下では相関係数を算出しない。
また、相関係数算出部18は、自車移動距離が自車移動距離閾値以上の場合に相関係数を算出し、自車移動距離閾値以下では相関係数を算出しない。
また、相関係数算出部18は、反射物体5との相対距離が相対距離閾値以上の場合に相関係数を算出し、相対距離閾値以下では相関係数を算出しない。
また、相関係数算出部18は、反射物体5の反射強度の信号対雑音比が信号対雑音比閾値以上の場合に相関係数を算出し、信号対雑音比閾値以下では相関係数を算出しない。
これらにより、低位置物体判別部による低位置物体判別の信頼性向上が図れる。
【0050】
実施の形態2.
この発明の実施の形態2に係るレーダ装置について、図8〜図10を参照しながら説明する。
図8は、本発明の実施の形態2によるレーダ装置の構成を示すブロック図である。
図9は、実施の形態2に係わるレーダ装置による処理内容の前半を表すフローチャートであり、図10は、実施の形態2に係わるレーダ装置による処理内容の後半を表すフローチャートである。
前述した実施の形態1では、同じ反射物体番号IDが割り当てられた反射物体5について、今回の信号処理周期と直近の過去数回までの所定信号処理周期の相対距離と反射強度の線型性を判別する指標として、相関係数を用いた場合について説明した。
実施の形態2では、線型性を判別する指標として、最小二乗法により算出した一次式との残差を用いた場合について説明する。
【0051】
図8において、28は残差算出部であり、その他は、実施の形態1の図1と同じ構成であり、その説明を省略する。
残差算出部28は、同定部17により同じIDが割り当てられた反射物体5について、測定周期(検出回数)が所定値(例えば10回)以上の場合、測定結果の相対距離、反射強度から最小二乗法を用いて一次式を求め、求めた一次式との残差を算出する。
具体的には、同定部17により同じIDが割り当てられた反射物体5について、今回の信号処理周期と直近の過去n回までの所定周期(合計n+1回)で得られた測定結果の相対距離Dsti、(i=0,1,2,3,…,n)、反射強度Ampi、(i=0,1,2,3,…,n)から残差Sを以下の順
に算出する。
まず、求める一次方程式をAmp = a×Dst +bとおくと、aとbは、次の式(3)で求め
られる。
【0052】
【数3】
【0053】
【数4】
【0054】
次に、残差S(S>0)は、次の式(5)で求められる。
【0055】
【数5】
【0056】
なお、i=0の場合が、今回の信号処理周期で得られた測定結果である。
【0057】
次に、低位置物体判別部19では、同じIDが割り当てられた反射物体5について、残差算出部28で算出した残差が所定値(例えば0.1以下)である場合、反射物体5が低位置物体であると判別する。
最後に、低位置物体か否かを判別された反射物体5は、車両制御部4に出力され、車両制御部4は、反射物体5が低位置物体の場合、走行支援システムの作動を中止あるいは緩和する。
【0058】
以下、図9および図10のフローチャートを参照しながら、この発明の実施の形態2に係るレーダ装置1の動作について具体的に説明する。
図9および図10において、ステップS201〜S211は、実施の形態1のステップS101〜S111と同じであり、その説明を省略する。
ステップS211に続いて、残差算出部28の処理によって、同じ反射物体番号IDが割り当てられた反射物体5について、今回の信号処理周期と直近の過去数回までの所定周期で得られた測定結果の相対距離、反射強度から最小二乗法を用いて一次式を求め、求めた一次式との残差を算出する(ステップS212)。
【0059】
続いて、低位置物体判別部19の処理によって、同じ反射物体番号IDが割り当てられた反射物体5について、ステップS212で算出した残差が所定範囲であるか否かを判定する(ステップS213)。
ステップS213において、残差が所定範囲内(すなわち、Yes)と判定された場合には、ステップS214に進む。一方、ステップS213において、残差が所定範囲外(すなわち、No)と判定された場合には、ステップS215に進む。
ステップS214〜S215は、ステップS114〜S115と同じであり、その説明を省略する。
【0060】
このように、相関係数算出部18(実施の形態1)に代えて残差算出部28を用いても、反射物体5が低位置物体であるか非低位置物体であるかを判別することができる。
なお、上記実施の形態で挙げた、今回の信号処理周期と直近の過去数回までの所定周期、対地速度閾値、測定周期(検出回数)閾値、自車移動距離閾値、相関係数の所定範囲、残差の所定範囲、SN比閾値などの各種値はそれぞれ、図3に示すレーダ装置1のビームパターン、レーダ装置1の固体差、レーダ装置1の検出性能などを基に適宜設定される値である。
【0061】
以上説明したように、実施の形態2によるレーダ装置は、車両に搭載されて、周辺に存在する反射物体に関する反射物体情報を測定して出力するレーダ装置であって、
所定の信号処理周期で、前記反射物体情報である自車と反射物体5との相対距離と相対速度、および反射物体5の水平方向角度と反射強度を測定する測定部13と、今回の信号処理周期と直近の過去数回までの所定周期分、測定部13が測定した測定結果を記憶する記憶部16と、記憶部16が記憶した前記所定周期分の測定結果から、時系列で同一の反射物体を同定する同定部17と、同定部17が同定した同一の反射物体について、記憶部16が記憶した今回の信号処理周期と直近の過去数回までの所定周期分の測定結果から得る前記相対距離および反射強度から最小二乗法を用いて一次式を求め、前記一次式との残差を算出する残差算出部28と、残差算出部28が算出した前記残差が所定条件である場合に、反射物体5が低位置物体であると判別する低位置物体判別部19とを備える。
これにより、自車と反射物体との相対距離や相対速度に関わらず、レーダ装置単体で前方にある反射物体を自車が跨いで走行することが可能な低位置物体であると判別することができる。
【0062】
また、実施の形態2によるレーダ装置は、さらに、自車の走行速度を測定する走行速度測定部2と、走行速度測定部2により得られた自車の走行速度と測定部13により得られた反射物体5との相対速度から反射物体5の対地速度を算出し、算出結果に基づいて反射物体5が静止物であるか否かを判別する静止物判別部14とを備え、記憶部16は、静止物判別部14により静止物として判別された場合に、今回の信号処理周期と直近の過去数回までの所定周期分、測定部13が測定した測定結果を記憶する。
これにより、記憶部の記憶領域を節約できる。
【0063】
また、実施の形態2によるレーダ装置は、さらに、自車の予測進路を予測する走行路推定部2と、反射物体5が走行路推定部2により得られた自車の予測進路上に存在するか否かを判別する予測進路上判別部15とを備え、記憶部16は、予測進路上判別部15により自車の予測進路上に反射物体5が存在すると判別された場合に、今回の信号処理周期と直近の過去数回までの所定周期分、測定部13が測定した測定結果を記憶する。
これにより、記憶部の記憶領域を節約できる。
【0064】
また、実施の形態2によるレーダ装置においては、残差算出部28は、反射物体5の検出回数が測定周期閾値以上の場合に残差を算出し、測定周期閾値以下では残差を算出しない。
また、残差算出部28は、自車移動距離が自車移動距離閾値以上の場合に残差を算出し、自車移動距離閾値以下では残差を算出しない。
また、残差算出部28は、反射物体5との相対距離が相対距離閾値以上の場合に残差を算出し、相対距離閾値以下では残差を算出しない。
また、残差算出部28は、反射物体5の反射強度の信号対雑音比が信号対雑音比閾値以上の場合に残差を算出し、信号対雑音比閾値以下では残差を算出しない。
これらにより、低位置物体判別部による低位置物体判別の信頼性向上が図れる。
【0065】
以上、実施の形態1および実施の形態2の2例について説明したが、本発明は、その要旨を逸脱しない範囲で種々の設計変更を加えることができる。
例えば、レーダ装置の搭載高さを600mmとしたが、本発明はレーダ装置の搭載高さをこの範囲に限定するものではなく、レーダ装置の搭載高さが既知であれば他の高さでもよい。
また、線型性を判別する指標として、相関係数や最小二乗法により算出した一次式との残差としたが、線型性を判別する指標であれば、他の方法でも良い。
さらに、測定結果の相対距離、反射強度から相関係数や最小二乗法により算出した一次式との残差を算出したが、測定結果の相対距離、SN比から算出しても良い。
【産業上の利用可能性】
【0066】
本発明は、自車と反射物体との相対距離や相対速度に関わらず、前方にある反射物体を自車が跨いで走行することが可能な低位置物体であると判別できるレーダ装置の実現に有用である。
【符号の説明】
【0067】
1 レーダ装置 2 走行速度測定部 3 走行路推定部、
4 車両制御部 5 反射物体 10 制御部
11 送受信部 12 送受波部 13 測定部
14 静止物判別部 15 予測進路上判別部 16 記憶部
17 同定部 18 相関係数算出部 19 低位置物体判別部
28 残差算出部
【特許請求の範囲】
【請求項1】
車両に搭載されて、周辺に存在する反射物体に関する反射物体情報を測定して出力するレーダ装置であって、
所定の信号処理周期で、前記反射物体情報である自車と前記反射物体との相対距離と相対速度、および前記反射物体の水平方向角度と反射強度を測定する測定部と、
今回の信号処理周期と直近の過去数回までの所定周期分、前記測定部が測定した測定結果を記憶する記憶部と、
前記記憶部が記憶した前記所定周期分の測定結果から、時系列で同一の反射物体を同定する同定部と、
前記同定部が同定した同一の反射物体について、前記記憶部が記憶した今回の信号処理周期と直近の過去数回までの所定周期分の測定結果から得る前記相対距離および反射強度から相関係数を算出する相関係数算出部と、
前記相関係数算出部が算出した前記相関係数が所定条件である場合に、前記反射物体が低位置物体であると判別する低位置物体判別部と、
を備えることを特徴とするレーダ装置。
【請求項2】
前記自車の走行速度を測定する走行速度測定部と、
前記走行速度測定部により得られた前記自車の走行速度と前記測定部により得られた前記反射物体との相対速度から前記反射物体の対地速度を算出し、算出結果に基づいて前記反射物体が静止物であるか否かを判別する静止物判別部とを備え、
前記記憶部は、前記静止物判別部により静止物として判別された場合に、今回の信号処理周期と直近の過去数回までの所定周期分、前記測定部が測定した測定結果を記憶することを特徴とする請求項1に記載のレーダ装置。
【請求項3】
前記自車の予測進路を予測する走行路推定部と、
前記反射物体が前記走行路推定部により得られた自車の予測進路上に存在するか否かを判別する予測進路上判別部とを備え、
前記記憶部は、前記予測進路上判別部により自車の予測進路上に前記反射物体が存在すると判別された場合に、今回の信号処理周期と直近の過去数回までの所定周期分、前記測定部が測定した測定結果を記憶することを特徴とする請求項1または2に記載のレーダ装置。
【請求項4】
前記相関係数算出部は、前記反射物体の検出回数が測定周期閾値以上の場合に相関係数を算出し、測定周期閾値以下では相関係数を算出しないことを特徴とする請求項1〜3のいずれか1項に記載のレーダ装置。
【請求項5】
前記相関係数算出部は、自車移動距離が自車移動距離閾値以上の場合に相関係数を算出し、自車移動距離閾値以下では相関係数を算出しないことを特徴とする請求項1〜3のいずれか1項に記載のレーダ装置。
【請求項6】
前記相関係数算出部は、前記反射物体との相対距離が相対距離閾値以上の場合に相関係数を算出し、相対距離閾値以下では相関係数を算出しないことを特徴とする請求項1〜3のいずれか1項に記載のレーダ装置。
【請求項7】
前記相関係数算出部は、前記反射物体の反射強度の信号対雑音比が信号対雑音比閾値以上の場合に相関係数を算出し、信号対雑音比閾値以下では相関係数を算出しないことを特徴とする請求項1〜3のいずれか1項に記載のレーダ装置。
【請求項8】
車両に搭載されて、周辺に存在する反射物体に関する反射物体情報を測定して出力する
レーダ装置であって、
所定の信号処理周期で、前記反射物体情報である自車と前記反射物体との相対距離と相対速度、および前記反射物体の水平方向角度と反射強度を測定する測定部と、
今回の信号処理周期と直近の過去数回までの所定周期分、前記測定部が測定した測定結果を記憶する記憶部と、
前記記憶部が記憶した前記所定周期分の測定結果から、時系列で同一の反射物体を同定する同定部と、
前記同定部が同定した同一の反射物体について、前記記憶部が記憶した今回の信号処理周期と直近の過去数回までの所定周期分の測定結果から得る前記相対距離および反射強度から最小二乗法を用いて一次式を求め、前記一次式との残差を算出する残差算出部と、
前記残差算出部が算出した前記残差が所定条件である場合に、前記反射物体が低位置物体であると判別する低位置物体判別部とを備えることを特徴とするレーダ装置。
【請求項9】
前記自車の走行速度を測定する走行速度測定部と、
前記走行速度測定部により得られた前記自車の走行速度と前記測定部により得られた前記反射物体との相対速度から前記反射物体の対地速度を算出し、算出結果に基づいて前記反射物体が静止物であるか否かを判別する静止物判別部とを備え、
前記記憶部は、前記静止物判別部により静止物として判別された場合に、今回の信号処理周期と直近の過去数回までの所定周期分、前記測定部が測定した測定結果を記憶することを特徴とする請求項8に記載のレーダ装置。
【請求項10】
前記自車の予測進路を予測する走行路推定部と、
前記反射物体が前記走行路推定部により得られた自車の予測進路上に存在するか否かを判別する予測進路上判別部とを備え、
前記記憶部は、前記予測進路上判別部により自車の予測進路上に前記反射物体が存在すると判別された場合に、今回の信号処理周期と直近の過去数回までの所定周期分、前記測定部が測定した測定結果を記憶することを特徴とする請求項8または9に記載のレーダ装置。
【請求項11】
前記残差算出部は、前記反射物体の検出回数が測定周期閾値以上の場合に残差を算出し、測定周期閾値以下では残差を算出しないことを特徴とする請求項8〜10いずれか1項に記載のレーダ装置。
【請求項12】
前記残差算出部は、自車移動距離が自車移動距離閾値以上の場合に残差を算出し、自車移動距離閾値以下では残差を算出しないことを特徴とする請求項8〜10のいずれか1項に記載のレーダ装置。
【請求項13】
前記残差算出部は、前記反射物体との相対距離が相対距離閾値以上の場合に残差を算出し、相対距離閾値以下では残差を算出しないことを特徴とする請求項8〜10のいずれか1項に記載のレーダ装置。
【請求項14】
前記残差算出部は、前記反射物体の反射強度の信号対雑音比が信号対雑音比閾値以上の場合に残差を算出し、信号対雑音比閾値以下では残差を算出しないことを特徴とする請求項8〜10のいずれか1項に記載のレーダ装置。
【請求項1】
車両に搭載されて、周辺に存在する反射物体に関する反射物体情報を測定して出力するレーダ装置であって、
所定の信号処理周期で、前記反射物体情報である自車と前記反射物体との相対距離と相対速度、および前記反射物体の水平方向角度と反射強度を測定する測定部と、
今回の信号処理周期と直近の過去数回までの所定周期分、前記測定部が測定した測定結果を記憶する記憶部と、
前記記憶部が記憶した前記所定周期分の測定結果から、時系列で同一の反射物体を同定する同定部と、
前記同定部が同定した同一の反射物体について、前記記憶部が記憶した今回の信号処理周期と直近の過去数回までの所定周期分の測定結果から得る前記相対距離および反射強度から相関係数を算出する相関係数算出部と、
前記相関係数算出部が算出した前記相関係数が所定条件である場合に、前記反射物体が低位置物体であると判別する低位置物体判別部と、
を備えることを特徴とするレーダ装置。
【請求項2】
前記自車の走行速度を測定する走行速度測定部と、
前記走行速度測定部により得られた前記自車の走行速度と前記測定部により得られた前記反射物体との相対速度から前記反射物体の対地速度を算出し、算出結果に基づいて前記反射物体が静止物であるか否かを判別する静止物判別部とを備え、
前記記憶部は、前記静止物判別部により静止物として判別された場合に、今回の信号処理周期と直近の過去数回までの所定周期分、前記測定部が測定した測定結果を記憶することを特徴とする請求項1に記載のレーダ装置。
【請求項3】
前記自車の予測進路を予測する走行路推定部と、
前記反射物体が前記走行路推定部により得られた自車の予測進路上に存在するか否かを判別する予測進路上判別部とを備え、
前記記憶部は、前記予測進路上判別部により自車の予測進路上に前記反射物体が存在すると判別された場合に、今回の信号処理周期と直近の過去数回までの所定周期分、前記測定部が測定した測定結果を記憶することを特徴とする請求項1または2に記載のレーダ装置。
【請求項4】
前記相関係数算出部は、前記反射物体の検出回数が測定周期閾値以上の場合に相関係数を算出し、測定周期閾値以下では相関係数を算出しないことを特徴とする請求項1〜3のいずれか1項に記載のレーダ装置。
【請求項5】
前記相関係数算出部は、自車移動距離が自車移動距離閾値以上の場合に相関係数を算出し、自車移動距離閾値以下では相関係数を算出しないことを特徴とする請求項1〜3のいずれか1項に記載のレーダ装置。
【請求項6】
前記相関係数算出部は、前記反射物体との相対距離が相対距離閾値以上の場合に相関係数を算出し、相対距離閾値以下では相関係数を算出しないことを特徴とする請求項1〜3のいずれか1項に記載のレーダ装置。
【請求項7】
前記相関係数算出部は、前記反射物体の反射強度の信号対雑音比が信号対雑音比閾値以上の場合に相関係数を算出し、信号対雑音比閾値以下では相関係数を算出しないことを特徴とする請求項1〜3のいずれか1項に記載のレーダ装置。
【請求項8】
車両に搭載されて、周辺に存在する反射物体に関する反射物体情報を測定して出力する
レーダ装置であって、
所定の信号処理周期で、前記反射物体情報である自車と前記反射物体との相対距離と相対速度、および前記反射物体の水平方向角度と反射強度を測定する測定部と、
今回の信号処理周期と直近の過去数回までの所定周期分、前記測定部が測定した測定結果を記憶する記憶部と、
前記記憶部が記憶した前記所定周期分の測定結果から、時系列で同一の反射物体を同定する同定部と、
前記同定部が同定した同一の反射物体について、前記記憶部が記憶した今回の信号処理周期と直近の過去数回までの所定周期分の測定結果から得る前記相対距離および反射強度から最小二乗法を用いて一次式を求め、前記一次式との残差を算出する残差算出部と、
前記残差算出部が算出した前記残差が所定条件である場合に、前記反射物体が低位置物体であると判別する低位置物体判別部とを備えることを特徴とするレーダ装置。
【請求項9】
前記自車の走行速度を測定する走行速度測定部と、
前記走行速度測定部により得られた前記自車の走行速度と前記測定部により得られた前記反射物体との相対速度から前記反射物体の対地速度を算出し、算出結果に基づいて前記反射物体が静止物であるか否かを判別する静止物判別部とを備え、
前記記憶部は、前記静止物判別部により静止物として判別された場合に、今回の信号処理周期と直近の過去数回までの所定周期分、前記測定部が測定した測定結果を記憶することを特徴とする請求項8に記載のレーダ装置。
【請求項10】
前記自車の予測進路を予測する走行路推定部と、
前記反射物体が前記走行路推定部により得られた自車の予測進路上に存在するか否かを判別する予測進路上判別部とを備え、
前記記憶部は、前記予測進路上判別部により自車の予測進路上に前記反射物体が存在すると判別された場合に、今回の信号処理周期と直近の過去数回までの所定周期分、前記測定部が測定した測定結果を記憶することを特徴とする請求項8または9に記載のレーダ装置。
【請求項11】
前記残差算出部は、前記反射物体の検出回数が測定周期閾値以上の場合に残差を算出し、測定周期閾値以下では残差を算出しないことを特徴とする請求項8〜10いずれか1項に記載のレーダ装置。
【請求項12】
前記残差算出部は、自車移動距離が自車移動距離閾値以上の場合に残差を算出し、自車移動距離閾値以下では残差を算出しないことを特徴とする請求項8〜10のいずれか1項に記載のレーダ装置。
【請求項13】
前記残差算出部は、前記反射物体との相対距離が相対距離閾値以上の場合に残差を算出し、相対距離閾値以下では残差を算出しないことを特徴とする請求項8〜10のいずれか1項に記載のレーダ装置。
【請求項14】
前記残差算出部は、前記反射物体の反射強度の信号対雑音比が信号対雑音比閾値以上の場合に残差を算出し、信号対雑音比閾値以下では残差を算出しないことを特徴とする請求項8〜10のいずれか1項に記載のレーダ装置。
【図1】

【図2】

【図3】
【図4】

【図5】
【図6】

【図7】
【図8】

【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−215489(P2012−215489A)
【公開日】平成24年11月8日(2012.11.8)
【国際特許分類】
【出願番号】特願2011−81541(P2011−81541)
【出願日】平成23年4月1日(2011.4.1)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成24年11月8日(2012.11.8)
【国際特許分類】
【出願日】平成23年4月1日(2011.4.1)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]