
レーダ装置
【課題】従来のレーダ装置は、帯域幅を広げるため、複数レーダの観測信号に帯域の内挿・拡張を行うが、各レーダでの観測信号の位置ずれと位相ずれを推定して補償し、精度良く位置あわせと位相あわせを実施する必要がある。しかし信号対雑音電力比の低い環境では帯域の内挿・拡張の性能が著しく低下する。
【解決手段】それぞれ近傍に配設され、異なる周波数帯域で目標を観測する複数のレーダと、各レーダの信号に対して、信号空間の共分散行列を推定する共分散行列推定手段と、推定された各レーダの信号に対する共分散行列を合成する共分散行列合成手段と、合成された合成共分散行列を用い、超解像アルゴリズムにより高分解能レンジプロフィールを推定する超解像レンジ圧縮手段とを備える。
【解決手段】それぞれ近傍に配設され、異なる周波数帯域で目標を観測する複数のレーダと、各レーダの信号に対して、信号空間の共分散行列を推定する共分散行列推定手段と、推定された各レーダの信号に対する共分散行列を合成する共分散行列合成手段と、合成された合成共分散行列を用い、超解像アルゴリズムにより高分解能レンジプロフィールを推定する超解像レンジ圧縮手段とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、目標の高分解能画像を生成するレーダ装置に関するものである。
【背景技術】
【0002】
レーダにおける距離分解能は占有帯域幅に依存する。例えば3センチメートルの分解能を実現するためには5ギガヘルツの帯域幅を必要とするが、周波数資源の有効利用の観点から、これだけの帯域幅を占有することは難しい。この問題に対処する方法として、一対のレーダを用い、例えば第1のレーダでは5.0から5.5ギガヘルツの周波数帯域、第2のレーダ装置では9.5から10.0ギガヘルツの周波数帯域を使用してそれぞれ観測を行い、その受信信号スペクトルを補間することによって、あたかも5から10ギガヘルツの周波数帯域で観測したスペクトルを推定しようとする試みがなされている。この場合、2つのレーダから目標までの距離は一般に異なるので、それぞれで観測された受信信号スペクトルの位相変化は連続でなく、あるいはコヒーレントではない。そこで、従来のレーダ装置では、第1の周波数帯域で観測する第1のレーダと第2の周波数帯域で観測する第2のレーダの空間スペクトルを、レンジ方向について位相を一致させた上で、これらの空間スペクトルに基づいて帯域を拡張することによりレンジの高分解能化を図っていた(例えば特許文献1参照)。
【0003】
特許文献1に掲載された従来のレーダ装置について説明する。
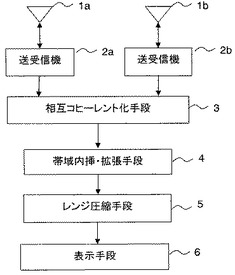
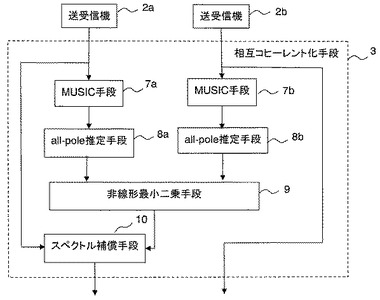
図1は従来のレーダ装置の観測のジオメトリを示す説明図である。図2は同レーダ装置の機能構成を示すブロック図である。図3は図2に示す相互コヒーレント化手段の詳細な構成を示すブロック図である。また、図4は同レーダ装置の信号スペクトルを示す模式図である。
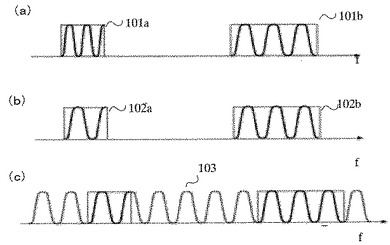
図1に示すように、略同一位置に設置された2つのレーダが同一の目標100を観測することを前提としている。すなわち、第1のレーダの送受信アンテナ1aと第2のレーダの送受信アンテナ1bにより、目標100に対するレーダ波の送受信を行う。ただし、2つのレーダの周波数帯域は異なる。このレーダ波のスペクトルを図4に示すが、横軸はレンジ方向の空間周波数あるいはレーダの瞬時送信周波数を表している。図4(a)において、101aは第1のレーダの受信信号、101bは第2のレーダの受信信号を表す。図4(b)において、102aは相互コヒーレント化手段3の出力における第1のレーダの受信信号を表し、102bは相互コヒーレント化手段3の出力における第2のレーダの受信信号を表す。なお、以下では相互コヒーレント化手段3は第1のレーダの受信信号のみを補償することを想定して説明しているので、信号102bは信号101bと等しい。また、図4(c)において、103は帯域内挿・拡張手段4の出力信号を表している。
【0004】
このレーダ装置の場合、第1および第2のレーダによるレンジ分解能は、信号101aのスペクトル帯域幅と信号101bのスペクトル帯域幅でそれぞれ規定され、これらの帯域幅が広いほど高いレンジ分解能を実現できる。そこで、2つのレーダで観測されたこれらの信号のスペクトルを内挿または外挿してスペクトルの帯域幅を拡大する。そのためには信号101aと信号101bの位相の連続性(コヒーレンシー)が保たれている必要があるが、図4(a)に示されるように、この条件は一般に成立しない。その理由は2つのレーダのアンテナ1a,1bの位相中心から目標100までの距離が、一般に完全には一致していないからである。この問題を解決するために、相互コヒーレント化手段3を用いて信号101aと信号101bの位相のスペクトルが連続になるようにスペクトルを補償するようにしている。信号101aのスペクトルを補償すると、図4(b)に示される信号102aのスペクトルのようになる。さらに、帯域内挿・拡張手段4により、スペクトルを内挿あるいは外挿してスペクトルの帯域幅を拡大する。拡張されたスペクトルは図4(c)に示される信号103のスペクトルのようになる。次に、レンジ圧縮手段5により、拡張された信号103のスペクトルをフーリエ変換し、レンジを圧縮して高いレンジ分解能を実現する。
【0005】
次に、図3に示す相互コヒーレント化手段3の詳細動作を説明する。
ここでは、信号101aと信号101bはP個の指数関数の和で表すものと仮定する。すなわち、次式のモデルで信号を表現する。
【0006】
【数1】

【0007】
まず、MUSIC手段7aにより、信号101aの極(pole)を求める。次に、all-pole推定手段8aにおいて、極に基づいて(1)式の係数ak 、pk を求め、モデルM1 を決定する。信号101bについても同様の処理を行って係数ak 、pk を求め、モデルM2 を決定する。次に、非線形最小二乗手段9において、(2)式で表す指標Cを最小化するΔθとAを求める。すなわち、2つのモデルM1 とM2 の位相の連続性を最大化するパラメータを探索する。ただし、Aは2つのモデルの振幅比を調整する係数、Δθは2つのモデルの位相差を調整する係数、Nはスペクトルの標本点数(図4の横軸のサンプル数)とする。またjは√(−1)である。
【0008】
【数2】
【0009】
最後に、スペクトル補償手段10において、非線形最小二乗手段9で求めたパラメータΔθと係数Aを用いて信号101aを補償し、図4(b)に示されるように位相の連続性が保たれた信号102aと102bの組が得られる。
【0010】
次に、帯域内挿・拡張手段4の詳細動作を説明する。
なお、ここでも信号102aと信号102bを合成した信号は指数関数の和で表されるものと仮定し、(3)式のモデルで信号を表現する。(3)式は(1)式と同じ形をしているが、信号102aと信号102bを合成した信号に対するモデルであるので、こちらのモデルMを global-pole と呼ぶことにする。
【0011】
【数3】
【0012】
まず、MUSIC手段7と同様の手段により、信号102aと信号102bを合成した信号の極を求める。次に、all-pole推定手段8と同様の手段で、極に基づいて(3)式の係数ak 、pk を求め、モデルMの初期値を決定する。次に、非線形最小二乗手段9と同様の手段で、(4)式に示される指標Jを最小化するモデルMを求めるためにak 、pk をパラメータとして探索する。ただし、sn は信号102aと信号102bを合成した信号のスペクトル、wn は適当な重み係数、<n>は信号102aと信号102bが値をもつ標本点である。
【0013】
【数4】
【0014】
最後に、推定されたパラメータak 、pk を(3)式に当てはめて帯域拡張された信号103のスペクトルを得る。以上のように動作することによって、従来のレーダ装置ではレンジについて高分解能化された目標の画像を得ていた。
【先行技術文献】
【特許文献】
【0015】
【特許文献1】米国特許第5945940号公報
【発明の概要】
【発明が解決しようとする課題】
【0016】
従来のレーダ装置は、帯域の内挿・拡張を実施するために、送信帯域の異なる複数のレーダの信号を合成する前に、相互コヒーレント化手段によって観測信号の位置あわせおよび位相合わせを実施していた。また、各レーダで観測された信号の位置ずれと位相ずれの量を推定するために、信号合成前に各レーダの信号に対してMUSIC法のような超解像アルゴリズムを適用していた。この従来のレーダ装置において、精度良く位置あわせと位相あわせを実施し、帯域の内挿・拡張が成功するためには、各レーダで観測された信号の位置ずれと位相ずれを正確に推定して補償する必要がある。すなわち、信号合成前の各レーダの信号に対して適用した超解像アルゴリズムにより、精度の良い信号推定が達成されている必要があった。このことは、この従来のレーダ装置においては、各レーダの信号を合成する前に、各レーダで観測された信号をそれぞれ別々に利用しても十分に分解能が上げることが出来る環境でないと帯域の内挿・拡張が成功しないことを示唆している。したがって、この従来のレーダ装置による帯域の内挿・拡張の性能は、例えば、信号対雑音電力比(SNR:Signal to Noise Ratio)が低い環境では著しく低下してしまう問題があった。
【0017】
この発明は、上記問題点を解決するためになされたもので、各レーダの信号に超解像アルゴリズムを適用せずに位置ずれを推定して補正することが可能なレーダ装置を得ることを目的とする。
【課題を解決するための手段】
【0018】
この発明に係るレーダ装置は、
それぞれ近傍に配設され、異なる周波数帯域で目標を観測する複数のレーダと、
前記各レーダの信号に対して、空間平均の手法によって信号空間の共分散行列を推定する処理を行う共分散行列推定手段と、
共分散行列推定手段で推定された各レーダの信号に対する共分散行列を合成する処理を行う共分散行列合成手段と、
前期共分散行列合成手段によって算出された合成共分散行列を用いて、超解像アルゴリズムにより高分解能レンジプロフィールを推定する超解像レンジ圧縮手段とを備える。
【発明の効果】
【0019】
この発明に係るレーダ装置によれば、各レーダの受信信号に対して、空間平均の手法によって信号空間の共分散行列を共分散行列推定手段で推定し、共分散行列合成手段により各レーダの信号に対する共分散行列を合成する処理を行う過程で各レーダの信号の位置ずれ量を補償しながら共分散行列の合成をし、この共分散行列合成手段によって算出された合成共分散行列を用いて、超解像アルゴリズムにより高分解能レンジプロフィールを超解像レンジ圧縮手段で推定することにより、各レーダの信号に超解像アルゴリズムを適用せず、各レーダの信号に対する共分散行列の合成共分散行列に超解像アルゴリズムを適用することで、位置ずれを推定して補正し高分解能レンジプロフィールを推定することが可能である効果を奏する。
【図面の簡単な説明】
【0020】
【図1】従来のレーダ装置の観測のジオメトリを示す説明図である。
【図2】従来のレーダ装置の機能構成を示すブロック図である。
【図3】図2に示す相互コヒーレント化手段の詳細な構成を示すブロック図である。
【図4】従来のレーダ装置の信号スペクトルを示す模式図である。
【図5】この発明の実施の形態1によるレーダ装置の機能構成を示すブロック図である。
【図6】この発明の実施の形態1によるレーダ装置における共分散行列合成手段の詳細な機能構成を示すブロック図である。
【図7】実施の形態1によるレーダ装置の観測信号の空間スペクトルの概念図である。
【図8】この発明の実施の形態2によるレーダ装置の機能構成を示すブロック図である。
【図9】この発明の実施の形態3によるレーダ装置の機能構成を示すブロック図である。
【発明を実施するための形態】
【0021】
実施の形態1.
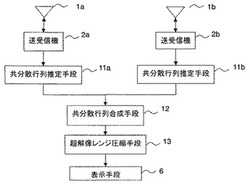
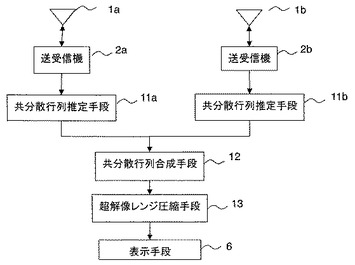
図5はこの発明の実施の形態1によるレーダ装置の機能構成を示すブロック図である。
図5において、送受信機2a,2bは、送受信アンテナ1a,1bを用いて異なる周波数帯域で目標を観測する第1、第2のレーダを構成する。共分散行列推定手段11aと11bは各レーダの信号に対して、空間平均の手法によって信号空間の共分散行列を推定する処理を行う手段である。共分散行列合成手段12は、共分散行列推定手段11aと11bで推定された各レーダの信号に対する共分散行列を合成する処理を行う手段である。超解像レンジ圧縮手段13は、共分散行列合成手段12で合成された共分散行列をMUSIC法などの超解像アルゴリズムにより高分解能レンジプロフィールを推定する手段である。表示手段6は、超解像レンジ圧縮手段13で処理して得られた目標の画像を表示する手段である。
【0022】
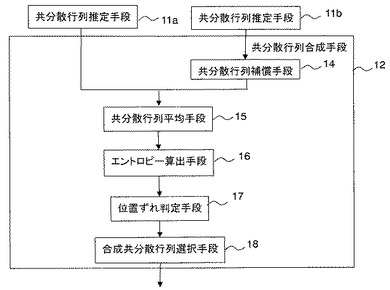
図6は図5に示した前記共分散行列合成手段12の詳細な機能構成を示すブロック図である。前記共分散行列合成手段12は、共分散行列補償手段14と共分散行列平均手段15とエントロピー算出手段16と位置ずれ判定手段17と合成共分散行列選択手段18を備えており、その詳細については後述する。
【0023】
次に、動作について説明する。本実施の形態1によるレーダ装置の観測のジオメトリは、図1に示す従来のレーダ装置の観測のジオメトリと同様である。すなわち、送信帯域の異なる複数のレーダによって、目標物を同時観測しているとする。図1には2つのレーダを図示しているが、2つ以上のいくつでもかまわない。ただし、目標とレーダの間の距離は、異なるレーダ間の距離に比べて十分に大きいものとする。このようなジオメトリで観測を行った場合、各レーダから目標までの距離は若干異なる。各レーダの位置は事前に計測しておくことは可能であるが、レーダの分解能以上のオーダで精密に位置あわせをすることは困難である。したがって、複数のレーダの信号を合成するにあたって、観測信号の位置ずれを補償する必要がある。なお、本明細書においては、以下では、特に断らない限り、レーダの数が2つの場合について記述するが、3つの場合に拡張することは容易である。
【0024】
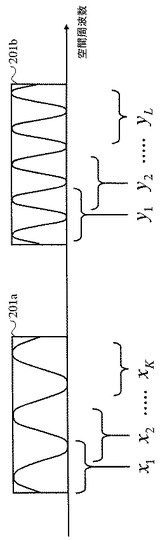
図7は本実施の形態1によるレーダ装置の観測信号の空間スペクトルの概念図である。本実施の形態1によるレーダ装置の方式は、この空間スペクトル信号に対して、Capon法やMUSIC(MULTIPLE SIGNAL CLASSIFICATION)法などの超解像アルゴリズムを適用して、2つのレーダで使用している送信信号帯域幅の合計で決まる分解能よりも高い分解能を得るものである。
【0025】
Capon法やMUSIC法などの超解像アルゴリズムによってレーダの距離分解能を向上する場合、まず、観測された空間スペクトル信号に対して、空間スムージングの手段を適用して、共分散行列を推定する。本実施の形態1によるレーダ装置においてもこれは同様であるが、各レーダで観測された信号には位置ずれが発生していることを考慮するために、まず、前記共分散行列推定手段11aと11bにおいて、第1のレーダと第2のレーダによって観測された空間スペクトル信号より、それぞれ共分散行列を推定する。
【0026】
【数5】
【0027】
式(5)において、R1 と R2は、それぞれ、第1のレーダと第2のレーダによって観測された空間スペクトル信号から推定された共分散行列である。xkと y1 は、第1のレーダと第2のレーダによって観測された空間スペクトル信号の中から連続するM個のサンプルを取り出して構成したM次元ベクトルである。ここで、M個のサンプルの取り出し方は図7に示すように、スライディングウィンドウをかける要領で取り出せばよい。KとLは、このようにして取り出したM次元ベクトルの数である。第1のレーダと第2のレーダの送信信号帯域は必ずしも一致している必要は無いので、KとLは必ずしも同じ値ではない。
【0028】
次に、前記共分散行列平均手段15において、R1 と R2の共分散行列を合成する。前記の通り、各レーダで観測された信号には位置ずれが発生していることを考慮して、次式によって R1 と R2 の共分散行列を合成する。
【0029】
【数6】
【0030】
ここで、R(τ) が合成された共分散行列である。以下では、これを合成共分散行列と呼ぶ。また、D(τ) は、未知の位置ずれ量τを補償するための項であり、exp(j2πτm) (ただし、m=0,1,…,M−1)を対角成分とする、MxMの対角行列である。
図6のブロック図において、前記共分散行列補償手段14は、式(6)のD(τ)R2D(τ)Hの演算を実施する。前記共分散行列平均手段15において、式(6)の残りの演算を実施している。
【0031】
なお、共分散行列を推定するために使用するサンプル数を等価的に増加させて、推定精度を向上する方式として、Forward-Backward空間スムージング法が知られているが、ここでもこの手法を適用することは可能である。その場合、式(5)および式(6)は、それぞれ、式(7)および式(8)で置き換える。
【0032】
【数7】
【0033】
共分散行列の最終的な推定値を得るためには、上記未知の位置ずれ量τを推定する必要がある。本実施の形態1によるレーダ装置においては、式(6)において,τが真の位置ずれに一致しない場合、点目標数増加と同等の効果があるため、R(τ)の固有値λm(τ)(ただし、m=1,2,…,M)のスペクトルが広がる現象があることに着目する。また、固有値スペクトルの広がりは,次式で定義されるエントロピーH(τ)で測ることができる。
【0034】
【数8】
【0035】
式(10)で定義されるエントロピーH(τ)を指標として、エントロピーH(τ)を最小にするτを探索することにより、固有値スペクトルの広がりを最小にするτ、すなわち、真の位置ずれ量に良く一致するτを見つけることが出来る。
【0036】
以上を踏まえ、前記エントロピー算出手段16は、位置ずれ量τを変化させながら、式(7)によってエントロピーH(τ)を算出する。次いで、前記位置ずれ判定手段17は、前記エントロピー算出手段16によって算出されたエントロピーH(τ)の値が最小となる位置ずれ量τを、位置ずれ量の推定値 τ’として出力する。前記合成共分散行列選択手段18は、前記位置ずれ判定手段17によって出力された位置ずれ量の推定値τ’を式(6)に代入して得られる合成共分散行列を出力する。
【0037】
【数9】
なお、前記共分散行列推定手段11aと11bにおいて、Forward-Backward空間スムージング法を用いた場合は、前記位置ずれ判定手段17によって出力された位置ずれ量の推定値τ’を式(8)に代入して得られる合成共分散行列を出力する。
【0038】
【数10】
【0039】
次いで、前記超解像レンジ圧縮手段13では、前記合成共分散行列選択手段18によって出力された合成共分散行列R(τ')を用いて、Capon法やMUSIC(MULTIPLE SIGNAL CLASSIFICATION)法などの超解像アルゴリズムを適用して、2つのレーダで使用している送信信号帯域幅の合計で決まる分解能よりも高い分解能を有するプロフィールを得る。なお、超解像アルゴリズムの処理手順は公知であり、この実施の形態1では公知の処理手順を用いる。
【0040】
以上のように、この実施の形態1によれば、未知の位置ずれ量を様々に仮定しながら合成共分散行列を生成し、この合成共分散行列の固有値スペクトルの広がりをエントロピーを指標として評価し、エントロピーの値が最も小さくなる位置ずれ量を、未知の位置ずれ量の推定値として用いるように構成したので、各レーダの信号に超解像アルゴリズムを適用せずに位置ずれを推定して補正することが可能である効果を奏する。
【0041】
実施の形態2.
図8はこの発明の実施の形態2によるレーダ装置の機能構成を示すブロック図である。
発明の実施の形態2によるレーダ装置は、相互相関関数算出手段19と位置ずれ粗推定手段20を備えている。
【0042】
次に、動作について説明する。本実施の形態2によるレーダ装置においては、まず、前記相互相関関数算出手段19において、第1のレーダと第2のレーダで観測したレンジプロフィールの相互相関関数を算出する。次いで、位置ずれ粗推定手段20において、相互相関関数のピークを検索することにより、第1のレーダと第2のレーダの信号の位置ずれを大まかに推定することが可能である。この推定結果を用いて、前記共分散行列平均手段15において、未知の位置ずれ量として設定する値の範囲を決定する。この範囲は、例えば、相互相関関数のピークを含み、各レーダの距離分解能程度の範囲に設定すれば良い。また、各レーダの距離分解能が異なる場合は、もっとも低い距離分解能に相当する範囲に設定すれば良い。
【0043】
以上のように、この実施の形態2によれば、位置ずれ量の候補として、第1のレーダと第2のレーダで観測したレンジプロフィールの相互相関関数のピーク周辺に絞り込むことができるので、演算量を低減できる効果を奏する。
【0044】
実施の形態3.
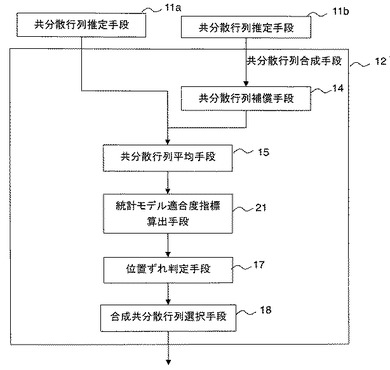
図9はこの発明の実施の形態3によるレーダ装置の機能構成を示すブロック図である。図9は、図5に示した実施の形態1によるレーダ装置の前記共分散行列合成手段12の構成図の中で、前記エントロピー算出手段16を統計モデル適合度指標算出手段21に置き換えたものである。
【0045】
前記統計モデル適合度指標算出手段21においては、R(τ)の固有値λm(τ)(ただし、m=1,2,…,M)のスペクトルに対して、信号に含まれる点目標の数をパラメータとする統計モデルを当てはめたときの適合度を測る指標を算出する。このような指標としては、例えば、赤池情報基準(AIC:Akaike Information Criteria)やMDL(Minimum Description Length)が良く知られている。
【0046】
以下では、AICを用いる場合を例に説明する。前記統計モデル適合度指標算出手段21においては、位置ずれ量τを変化させながら、各ずれ量τにおける固有値スペクトルに対して、仮定する点目標の数を様々に変化させた場合のAICを算出する。次いで、各ずれ量τにおいて、AICを最小値とする点目標の数を決定し、このときのAICを各ずれ量τにおけるAICの評価値として出力する。
【0047】
次いで、位置ずれ判定手段17では、これらのAICを最小値とする点目標の数が最も少ないずれ量τを選択する。このとき、点目標の数が最小となるずれ量τが一意に決まらない場合がある。この場合は、点目標の数が最小となるずれ量τのうち、AICの評価値が最小となるずれ量τを位置ずれの推定値τ’として出力する。
【0048】
以上のように、この実施の形態3によれば、統計モデルを当てはめたときの適合度を測る指標を用いてずれ量を推定するように構成したので、各レーダの信号に超解像アルゴリズムを適用せずに位置ずれを推定して補正することが可能である効果を奏する。また、前記超解像レンジ圧縮手段13において、MUSIC法のように点目標数の推定を必要とするアルゴリズムを採用する場合、位置ずれの推定値τ’におけるAICの最小値を与える点目標の数を、点目標数の推定値としてそのまま使用できる効果を奏する。
【産業上の利用可能性】
【0049】
この発明によるレーダ装置は、目標の高分解能画像が生成できるので、目標画像、特に目標の高分解能画像を必要とする場合に用いるレーダ装置に利用される可能性がある。
【符号の説明】
【0050】
1a,1b;送受信アンテナ、2a,2b;送受信機、11a,11b;共分散行列推定手段、12;共分散行列合成手段、13;超解像レンジ圧縮手段、14;共分散行列補償手段、15;共分散行列平均手段、16;エントロピー算出手段、17;位置ずれ判定手段、18;合成共分散行列選択手段、19;相互相関関数算出手段、20;位置ずれ粗推定手段、21;統計モデル適合度指標算出手段。
【技術分野】
【0001】
この発明は、目標の高分解能画像を生成するレーダ装置に関するものである。
【背景技術】
【0002】
レーダにおける距離分解能は占有帯域幅に依存する。例えば3センチメートルの分解能を実現するためには5ギガヘルツの帯域幅を必要とするが、周波数資源の有効利用の観点から、これだけの帯域幅を占有することは難しい。この問題に対処する方法として、一対のレーダを用い、例えば第1のレーダでは5.0から5.5ギガヘルツの周波数帯域、第2のレーダ装置では9.5から10.0ギガヘルツの周波数帯域を使用してそれぞれ観測を行い、その受信信号スペクトルを補間することによって、あたかも5から10ギガヘルツの周波数帯域で観測したスペクトルを推定しようとする試みがなされている。この場合、2つのレーダから目標までの距離は一般に異なるので、それぞれで観測された受信信号スペクトルの位相変化は連続でなく、あるいはコヒーレントではない。そこで、従来のレーダ装置では、第1の周波数帯域で観測する第1のレーダと第2の周波数帯域で観測する第2のレーダの空間スペクトルを、レンジ方向について位相を一致させた上で、これらの空間スペクトルに基づいて帯域を拡張することによりレンジの高分解能化を図っていた(例えば特許文献1参照)。
【0003】
特許文献1に掲載された従来のレーダ装置について説明する。
図1は従来のレーダ装置の観測のジオメトリを示す説明図である。図2は同レーダ装置の機能構成を示すブロック図である。図3は図2に示す相互コヒーレント化手段の詳細な構成を示すブロック図である。また、図4は同レーダ装置の信号スペクトルを示す模式図である。
図1に示すように、略同一位置に設置された2つのレーダが同一の目標100を観測することを前提としている。すなわち、第1のレーダの送受信アンテナ1aと第2のレーダの送受信アンテナ1bにより、目標100に対するレーダ波の送受信を行う。ただし、2つのレーダの周波数帯域は異なる。このレーダ波のスペクトルを図4に示すが、横軸はレンジ方向の空間周波数あるいはレーダの瞬時送信周波数を表している。図4(a)において、101aは第1のレーダの受信信号、101bは第2のレーダの受信信号を表す。図4(b)において、102aは相互コヒーレント化手段3の出力における第1のレーダの受信信号を表し、102bは相互コヒーレント化手段3の出力における第2のレーダの受信信号を表す。なお、以下では相互コヒーレント化手段3は第1のレーダの受信信号のみを補償することを想定して説明しているので、信号102bは信号101bと等しい。また、図4(c)において、103は帯域内挿・拡張手段4の出力信号を表している。
【0004】
このレーダ装置の場合、第1および第2のレーダによるレンジ分解能は、信号101aのスペクトル帯域幅と信号101bのスペクトル帯域幅でそれぞれ規定され、これらの帯域幅が広いほど高いレンジ分解能を実現できる。そこで、2つのレーダで観測されたこれらの信号のスペクトルを内挿または外挿してスペクトルの帯域幅を拡大する。そのためには信号101aと信号101bの位相の連続性(コヒーレンシー)が保たれている必要があるが、図4(a)に示されるように、この条件は一般に成立しない。その理由は2つのレーダのアンテナ1a,1bの位相中心から目標100までの距離が、一般に完全には一致していないからである。この問題を解決するために、相互コヒーレント化手段3を用いて信号101aと信号101bの位相のスペクトルが連続になるようにスペクトルを補償するようにしている。信号101aのスペクトルを補償すると、図4(b)に示される信号102aのスペクトルのようになる。さらに、帯域内挿・拡張手段4により、スペクトルを内挿あるいは外挿してスペクトルの帯域幅を拡大する。拡張されたスペクトルは図4(c)に示される信号103のスペクトルのようになる。次に、レンジ圧縮手段5により、拡張された信号103のスペクトルをフーリエ変換し、レンジを圧縮して高いレンジ分解能を実現する。
【0005】
次に、図3に示す相互コヒーレント化手段3の詳細動作を説明する。
ここでは、信号101aと信号101bはP個の指数関数の和で表すものと仮定する。すなわち、次式のモデルで信号を表現する。
【0006】
【数1】
【0007】
まず、MUSIC手段7aにより、信号101aの極(pole)を求める。次に、all-pole推定手段8aにおいて、極に基づいて(1)式の係数ak 、pk を求め、モデルM1 を決定する。信号101bについても同様の処理を行って係数ak 、pk を求め、モデルM2 を決定する。次に、非線形最小二乗手段9において、(2)式で表す指標Cを最小化するΔθとAを求める。すなわち、2つのモデルM1 とM2 の位相の連続性を最大化するパラメータを探索する。ただし、Aは2つのモデルの振幅比を調整する係数、Δθは2つのモデルの位相差を調整する係数、Nはスペクトルの標本点数(図4の横軸のサンプル数)とする。またjは√(−1)である。
【0008】
【数2】
【0009】
最後に、スペクトル補償手段10において、非線形最小二乗手段9で求めたパラメータΔθと係数Aを用いて信号101aを補償し、図4(b)に示されるように位相の連続性が保たれた信号102aと102bの組が得られる。
【0010】
次に、帯域内挿・拡張手段4の詳細動作を説明する。
なお、ここでも信号102aと信号102bを合成した信号は指数関数の和で表されるものと仮定し、(3)式のモデルで信号を表現する。(3)式は(1)式と同じ形をしているが、信号102aと信号102bを合成した信号に対するモデルであるので、こちらのモデルMを global-pole と呼ぶことにする。
【0011】
【数3】
【0012】
まず、MUSIC手段7と同様の手段により、信号102aと信号102bを合成した信号の極を求める。次に、all-pole推定手段8と同様の手段で、極に基づいて(3)式の係数ak 、pk を求め、モデルMの初期値を決定する。次に、非線形最小二乗手段9と同様の手段で、(4)式に示される指標Jを最小化するモデルMを求めるためにak 、pk をパラメータとして探索する。ただし、sn は信号102aと信号102bを合成した信号のスペクトル、wn は適当な重み係数、<n>は信号102aと信号102bが値をもつ標本点である。
【0013】
【数4】
【0014】
最後に、推定されたパラメータak 、pk を(3)式に当てはめて帯域拡張された信号103のスペクトルを得る。以上のように動作することによって、従来のレーダ装置ではレンジについて高分解能化された目標の画像を得ていた。
【先行技術文献】
【特許文献】
【0015】
【特許文献1】米国特許第5945940号公報
【発明の概要】
【発明が解決しようとする課題】
【0016】
従来のレーダ装置は、帯域の内挿・拡張を実施するために、送信帯域の異なる複数のレーダの信号を合成する前に、相互コヒーレント化手段によって観測信号の位置あわせおよび位相合わせを実施していた。また、各レーダで観測された信号の位置ずれと位相ずれの量を推定するために、信号合成前に各レーダの信号に対してMUSIC法のような超解像アルゴリズムを適用していた。この従来のレーダ装置において、精度良く位置あわせと位相あわせを実施し、帯域の内挿・拡張が成功するためには、各レーダで観測された信号の位置ずれと位相ずれを正確に推定して補償する必要がある。すなわち、信号合成前の各レーダの信号に対して適用した超解像アルゴリズムにより、精度の良い信号推定が達成されている必要があった。このことは、この従来のレーダ装置においては、各レーダの信号を合成する前に、各レーダで観測された信号をそれぞれ別々に利用しても十分に分解能が上げることが出来る環境でないと帯域の内挿・拡張が成功しないことを示唆している。したがって、この従来のレーダ装置による帯域の内挿・拡張の性能は、例えば、信号対雑音電力比(SNR:Signal to Noise Ratio)が低い環境では著しく低下してしまう問題があった。
【0017】
この発明は、上記問題点を解決するためになされたもので、各レーダの信号に超解像アルゴリズムを適用せずに位置ずれを推定して補正することが可能なレーダ装置を得ることを目的とする。
【課題を解決するための手段】
【0018】
この発明に係るレーダ装置は、
それぞれ近傍に配設され、異なる周波数帯域で目標を観測する複数のレーダと、
前記各レーダの信号に対して、空間平均の手法によって信号空間の共分散行列を推定する処理を行う共分散行列推定手段と、
共分散行列推定手段で推定された各レーダの信号に対する共分散行列を合成する処理を行う共分散行列合成手段と、
前期共分散行列合成手段によって算出された合成共分散行列を用いて、超解像アルゴリズムにより高分解能レンジプロフィールを推定する超解像レンジ圧縮手段とを備える。
【発明の効果】
【0019】
この発明に係るレーダ装置によれば、各レーダの受信信号に対して、空間平均の手法によって信号空間の共分散行列を共分散行列推定手段で推定し、共分散行列合成手段により各レーダの信号に対する共分散行列を合成する処理を行う過程で各レーダの信号の位置ずれ量を補償しながら共分散行列の合成をし、この共分散行列合成手段によって算出された合成共分散行列を用いて、超解像アルゴリズムにより高分解能レンジプロフィールを超解像レンジ圧縮手段で推定することにより、各レーダの信号に超解像アルゴリズムを適用せず、各レーダの信号に対する共分散行列の合成共分散行列に超解像アルゴリズムを適用することで、位置ずれを推定して補正し高分解能レンジプロフィールを推定することが可能である効果を奏する。
【図面の簡単な説明】
【0020】
【図1】従来のレーダ装置の観測のジオメトリを示す説明図である。
【図2】従来のレーダ装置の機能構成を示すブロック図である。
【図3】図2に示す相互コヒーレント化手段の詳細な構成を示すブロック図である。
【図4】従来のレーダ装置の信号スペクトルを示す模式図である。
【図5】この発明の実施の形態1によるレーダ装置の機能構成を示すブロック図である。
【図6】この発明の実施の形態1によるレーダ装置における共分散行列合成手段の詳細な機能構成を示すブロック図である。
【図7】実施の形態1によるレーダ装置の観測信号の空間スペクトルの概念図である。
【図8】この発明の実施の形態2によるレーダ装置の機能構成を示すブロック図である。
【図9】この発明の実施の形態3によるレーダ装置の機能構成を示すブロック図である。
【発明を実施するための形態】
【0021】
実施の形態1.
図5はこの発明の実施の形態1によるレーダ装置の機能構成を示すブロック図である。
図5において、送受信機2a,2bは、送受信アンテナ1a,1bを用いて異なる周波数帯域で目標を観測する第1、第2のレーダを構成する。共分散行列推定手段11aと11bは各レーダの信号に対して、空間平均の手法によって信号空間の共分散行列を推定する処理を行う手段である。共分散行列合成手段12は、共分散行列推定手段11aと11bで推定された各レーダの信号に対する共分散行列を合成する処理を行う手段である。超解像レンジ圧縮手段13は、共分散行列合成手段12で合成された共分散行列をMUSIC法などの超解像アルゴリズムにより高分解能レンジプロフィールを推定する手段である。表示手段6は、超解像レンジ圧縮手段13で処理して得られた目標の画像を表示する手段である。
【0022】
図6は図5に示した前記共分散行列合成手段12の詳細な機能構成を示すブロック図である。前記共分散行列合成手段12は、共分散行列補償手段14と共分散行列平均手段15とエントロピー算出手段16と位置ずれ判定手段17と合成共分散行列選択手段18を備えており、その詳細については後述する。
【0023】
次に、動作について説明する。本実施の形態1によるレーダ装置の観測のジオメトリは、図1に示す従来のレーダ装置の観測のジオメトリと同様である。すなわち、送信帯域の異なる複数のレーダによって、目標物を同時観測しているとする。図1には2つのレーダを図示しているが、2つ以上のいくつでもかまわない。ただし、目標とレーダの間の距離は、異なるレーダ間の距離に比べて十分に大きいものとする。このようなジオメトリで観測を行った場合、各レーダから目標までの距離は若干異なる。各レーダの位置は事前に計測しておくことは可能であるが、レーダの分解能以上のオーダで精密に位置あわせをすることは困難である。したがって、複数のレーダの信号を合成するにあたって、観測信号の位置ずれを補償する必要がある。なお、本明細書においては、以下では、特に断らない限り、レーダの数が2つの場合について記述するが、3つの場合に拡張することは容易である。
【0024】
図7は本実施の形態1によるレーダ装置の観測信号の空間スペクトルの概念図である。本実施の形態1によるレーダ装置の方式は、この空間スペクトル信号に対して、Capon法やMUSIC(MULTIPLE SIGNAL CLASSIFICATION)法などの超解像アルゴリズムを適用して、2つのレーダで使用している送信信号帯域幅の合計で決まる分解能よりも高い分解能を得るものである。
【0025】
Capon法やMUSIC法などの超解像アルゴリズムによってレーダの距離分解能を向上する場合、まず、観測された空間スペクトル信号に対して、空間スムージングの手段を適用して、共分散行列を推定する。本実施の形態1によるレーダ装置においてもこれは同様であるが、各レーダで観測された信号には位置ずれが発生していることを考慮するために、まず、前記共分散行列推定手段11aと11bにおいて、第1のレーダと第2のレーダによって観測された空間スペクトル信号より、それぞれ共分散行列を推定する。
【0026】
【数5】
【0027】
式(5)において、R1 と R2は、それぞれ、第1のレーダと第2のレーダによって観測された空間スペクトル信号から推定された共分散行列である。xkと y1 は、第1のレーダと第2のレーダによって観測された空間スペクトル信号の中から連続するM個のサンプルを取り出して構成したM次元ベクトルである。ここで、M個のサンプルの取り出し方は図7に示すように、スライディングウィンドウをかける要領で取り出せばよい。KとLは、このようにして取り出したM次元ベクトルの数である。第1のレーダと第2のレーダの送信信号帯域は必ずしも一致している必要は無いので、KとLは必ずしも同じ値ではない。
【0028】
次に、前記共分散行列平均手段15において、R1 と R2の共分散行列を合成する。前記の通り、各レーダで観測された信号には位置ずれが発生していることを考慮して、次式によって R1 と R2 の共分散行列を合成する。
【0029】
【数6】
【0030】
ここで、R(τ) が合成された共分散行列である。以下では、これを合成共分散行列と呼ぶ。また、D(τ) は、未知の位置ずれ量τを補償するための項であり、exp(j2πτm) (ただし、m=0,1,…,M−1)を対角成分とする、MxMの対角行列である。
図6のブロック図において、前記共分散行列補償手段14は、式(6)のD(τ)R2D(τ)Hの演算を実施する。前記共分散行列平均手段15において、式(6)の残りの演算を実施している。
【0031】
なお、共分散行列を推定するために使用するサンプル数を等価的に増加させて、推定精度を向上する方式として、Forward-Backward空間スムージング法が知られているが、ここでもこの手法を適用することは可能である。その場合、式(5)および式(6)は、それぞれ、式(7)および式(8)で置き換える。
【0032】
【数7】
【0033】
共分散行列の最終的な推定値を得るためには、上記未知の位置ずれ量τを推定する必要がある。本実施の形態1によるレーダ装置においては、式(6)において,τが真の位置ずれに一致しない場合、点目標数増加と同等の効果があるため、R(τ)の固有値λm(τ)(ただし、m=1,2,…,M)のスペクトルが広がる現象があることに着目する。また、固有値スペクトルの広がりは,次式で定義されるエントロピーH(τ)で測ることができる。
【0034】
【数8】
【0035】
式(10)で定義されるエントロピーH(τ)を指標として、エントロピーH(τ)を最小にするτを探索することにより、固有値スペクトルの広がりを最小にするτ、すなわち、真の位置ずれ量に良く一致するτを見つけることが出来る。
【0036】
以上を踏まえ、前記エントロピー算出手段16は、位置ずれ量τを変化させながら、式(7)によってエントロピーH(τ)を算出する。次いで、前記位置ずれ判定手段17は、前記エントロピー算出手段16によって算出されたエントロピーH(τ)の値が最小となる位置ずれ量τを、位置ずれ量の推定値 τ’として出力する。前記合成共分散行列選択手段18は、前記位置ずれ判定手段17によって出力された位置ずれ量の推定値τ’を式(6)に代入して得られる合成共分散行列を出力する。
【0037】
【数9】
なお、前記共分散行列推定手段11aと11bにおいて、Forward-Backward空間スムージング法を用いた場合は、前記位置ずれ判定手段17によって出力された位置ずれ量の推定値τ’を式(8)に代入して得られる合成共分散行列を出力する。
【0038】
【数10】
【0039】
次いで、前記超解像レンジ圧縮手段13では、前記合成共分散行列選択手段18によって出力された合成共分散行列R(τ')を用いて、Capon法やMUSIC(MULTIPLE SIGNAL CLASSIFICATION)法などの超解像アルゴリズムを適用して、2つのレーダで使用している送信信号帯域幅の合計で決まる分解能よりも高い分解能を有するプロフィールを得る。なお、超解像アルゴリズムの処理手順は公知であり、この実施の形態1では公知の処理手順を用いる。
【0040】
以上のように、この実施の形態1によれば、未知の位置ずれ量を様々に仮定しながら合成共分散行列を生成し、この合成共分散行列の固有値スペクトルの広がりをエントロピーを指標として評価し、エントロピーの値が最も小さくなる位置ずれ量を、未知の位置ずれ量の推定値として用いるように構成したので、各レーダの信号に超解像アルゴリズムを適用せずに位置ずれを推定して補正することが可能である効果を奏する。
【0041】
実施の形態2.
図8はこの発明の実施の形態2によるレーダ装置の機能構成を示すブロック図である。
発明の実施の形態2によるレーダ装置は、相互相関関数算出手段19と位置ずれ粗推定手段20を備えている。
【0042】
次に、動作について説明する。本実施の形態2によるレーダ装置においては、まず、前記相互相関関数算出手段19において、第1のレーダと第2のレーダで観測したレンジプロフィールの相互相関関数を算出する。次いで、位置ずれ粗推定手段20において、相互相関関数のピークを検索することにより、第1のレーダと第2のレーダの信号の位置ずれを大まかに推定することが可能である。この推定結果を用いて、前記共分散行列平均手段15において、未知の位置ずれ量として設定する値の範囲を決定する。この範囲は、例えば、相互相関関数のピークを含み、各レーダの距離分解能程度の範囲に設定すれば良い。また、各レーダの距離分解能が異なる場合は、もっとも低い距離分解能に相当する範囲に設定すれば良い。
【0043】
以上のように、この実施の形態2によれば、位置ずれ量の候補として、第1のレーダと第2のレーダで観測したレンジプロフィールの相互相関関数のピーク周辺に絞り込むことができるので、演算量を低減できる効果を奏する。
【0044】
実施の形態3.
図9はこの発明の実施の形態3によるレーダ装置の機能構成を示すブロック図である。図9は、図5に示した実施の形態1によるレーダ装置の前記共分散行列合成手段12の構成図の中で、前記エントロピー算出手段16を統計モデル適合度指標算出手段21に置き換えたものである。
【0045】
前記統計モデル適合度指標算出手段21においては、R(τ)の固有値λm(τ)(ただし、m=1,2,…,M)のスペクトルに対して、信号に含まれる点目標の数をパラメータとする統計モデルを当てはめたときの適合度を測る指標を算出する。このような指標としては、例えば、赤池情報基準(AIC:Akaike Information Criteria)やMDL(Minimum Description Length)が良く知られている。
【0046】
以下では、AICを用いる場合を例に説明する。前記統計モデル適合度指標算出手段21においては、位置ずれ量τを変化させながら、各ずれ量τにおける固有値スペクトルに対して、仮定する点目標の数を様々に変化させた場合のAICを算出する。次いで、各ずれ量τにおいて、AICを最小値とする点目標の数を決定し、このときのAICを各ずれ量τにおけるAICの評価値として出力する。
【0047】
次いで、位置ずれ判定手段17では、これらのAICを最小値とする点目標の数が最も少ないずれ量τを選択する。このとき、点目標の数が最小となるずれ量τが一意に決まらない場合がある。この場合は、点目標の数が最小となるずれ量τのうち、AICの評価値が最小となるずれ量τを位置ずれの推定値τ’として出力する。
【0048】
以上のように、この実施の形態3によれば、統計モデルを当てはめたときの適合度を測る指標を用いてずれ量を推定するように構成したので、各レーダの信号に超解像アルゴリズムを適用せずに位置ずれを推定して補正することが可能である効果を奏する。また、前記超解像レンジ圧縮手段13において、MUSIC法のように点目標数の推定を必要とするアルゴリズムを採用する場合、位置ずれの推定値τ’におけるAICの最小値を与える点目標の数を、点目標数の推定値としてそのまま使用できる効果を奏する。
【産業上の利用可能性】
【0049】
この発明によるレーダ装置は、目標の高分解能画像が生成できるので、目標画像、特に目標の高分解能画像を必要とする場合に用いるレーダ装置に利用される可能性がある。
【符号の説明】
【0050】
1a,1b;送受信アンテナ、2a,2b;送受信機、11a,11b;共分散行列推定手段、12;共分散行列合成手段、13;超解像レンジ圧縮手段、14;共分散行列補償手段、15;共分散行列平均手段、16;エントロピー算出手段、17;位置ずれ判定手段、18;合成共分散行列選択手段、19;相互相関関数算出手段、20;位置ずれ粗推定手段、21;統計モデル適合度指標算出手段。
【特許請求の範囲】
【請求項1】
それぞれ近傍に配設され、異なる周波数帯域で目標を観測する複数のレーダと、
前記各レーダの信号に対して、空間平均の手法によって信号空間の共分散行列を推定する処理を行う共分散行列推定手段と、
共分散行列推定手段で推定された各レーダの信号に対する共分散行列を合成する処理を行う共分散行列合成手段と、
前期共分散行列合成手段によって算出された合成共分散行列を用いて、超解像アルゴリズムにより高分解能レンジプロフィールを推定する超解像レンジ圧縮手段と
を備えることを特徴とするレーダ装置。
【請求項2】
前記共分散行列合成手段は、
前記各レーダで観測された信号に対して複数の仮定した位置ずれ量に対応する位相補償を施す共分散行列補償手段と,
前記共分散行列補償手段において位相補償を施した各レーダの信号に対応する共分散行列の平均を算出する共分散行列平均手段と、
前記共分散行列平均手段において算出した平均の共分散行列を固有値分解し、その固有値スペクトルの広がりを測る指標であるエントロピーを算出するエントロピー算出手段と、
前記エントロピー算出手段において算出されたエントロピーが最小となる位置ずれ量を、位置ずれ量の推定値として出力する位置ずれ判定手段と,
前記位置ずれ判定手段において判定された位置ずれ量に基づいて位相補償を施した各レーダの信号に対応する共分散行列の平均の共分散行列を出力する合成共分散行列選択手段と
を備えることを特徴とする請求項1に記載のレーダ装置。
【請求項3】
前記共分散行列合成手段は、
前記各レーダで観測された信号に対して複数の仮定した位置ずれ量に対応する位相補償を施す共分散行列補償手段と,
前記共分散行列補償手段において位相補償を施した各レーダの信号に対応する共分散行列の平均を算出する共分散行列平均手段と、
前記共分散行列平均手段において算出した平均の共分散行列を固有値分解し、その固有値スペクトルに対して、点目標数をパラメータとする信号の統計モデルの適合度を測る指標算出する統計モデル適合度指標算出手段と、
前記統計モデル適合度指標算出手段において算出された統計モデル適合度指標が最小となる位置ずれ量を、位置ずれ量の推定値として出力する位置ずれ判定手段と,
前記位置ずれ判定手段において判定された位置ずれ量に基づいて位相補償を施した各レーダの信号に対応する共分散行列の平均の共分散行列を出力する合成共分散行列選択手段と
を備えることを特徴とする請求項1に記載のレーダ装置。
【請求項4】
前記各レーダで観測したレンジプロフィールの相互相関関数を算出する相互相関関数算出手段と、
相互相関関数のピークを検索することにより、前記各レーダの信号の間の位置ずれを大まかに推定し、前記共分散行列合成手段において様々に仮定する位置ずれ量の設定範囲を絞る位置ずれ粗推定手段と
を備えることを特徴とする請求項2または3に記載のレーダ装置。
【請求項5】
前記位置ずれ粗推定手段は、前記共分散行列合成手段において様々に仮定する位置ずれ量の設定範囲として、相互相関関数のピークに対して、前記各レーダの距離分解能程度あるいは各レーダの距離分解能のうち最も低い距離分解能の範囲とすることを特徴とする請求項4に記載のレーダ装置。
【請求項6】
前記統計モデル適合度指標算出手段は、統計モデルの適合度を測る指標として、赤池情報基準(AIC:Akaike Information Criteria)を採用することを特徴とする請求項3に記載のレーダ装置。
【請求項7】
前記統計モデル適合度指標算出手段は、統計モデルの適合度を測る指標として、MDL(Minimum Description Length)を採用することを特徴とする請求項3に記載のレーダ装置。
【請求項8】
前記超解像レンジ圧縮手段において、超解像アルゴリズムとしてCapon法を用いることを特徴とする請求項1乃至7の何れか1項に記載のレーダ装置。
【請求項9】
前記超解像レンジ圧縮手段において、超解像アルゴリズムとしてMUSIC法を用いることを特徴とする請求項1乃至7の何れか1項に記載のレーダ装置。
【請求項1】
それぞれ近傍に配設され、異なる周波数帯域で目標を観測する複数のレーダと、
前記各レーダの信号に対して、空間平均の手法によって信号空間の共分散行列を推定する処理を行う共分散行列推定手段と、
共分散行列推定手段で推定された各レーダの信号に対する共分散行列を合成する処理を行う共分散行列合成手段と、
前期共分散行列合成手段によって算出された合成共分散行列を用いて、超解像アルゴリズムにより高分解能レンジプロフィールを推定する超解像レンジ圧縮手段と
を備えることを特徴とするレーダ装置。
【請求項2】
前記共分散行列合成手段は、
前記各レーダで観測された信号に対して複数の仮定した位置ずれ量に対応する位相補償を施す共分散行列補償手段と,
前記共分散行列補償手段において位相補償を施した各レーダの信号に対応する共分散行列の平均を算出する共分散行列平均手段と、
前記共分散行列平均手段において算出した平均の共分散行列を固有値分解し、その固有値スペクトルの広がりを測る指標であるエントロピーを算出するエントロピー算出手段と、
前記エントロピー算出手段において算出されたエントロピーが最小となる位置ずれ量を、位置ずれ量の推定値として出力する位置ずれ判定手段と,
前記位置ずれ判定手段において判定された位置ずれ量に基づいて位相補償を施した各レーダの信号に対応する共分散行列の平均の共分散行列を出力する合成共分散行列選択手段と
を備えることを特徴とする請求項1に記載のレーダ装置。
【請求項3】
前記共分散行列合成手段は、
前記各レーダで観測された信号に対して複数の仮定した位置ずれ量に対応する位相補償を施す共分散行列補償手段と,
前記共分散行列補償手段において位相補償を施した各レーダの信号に対応する共分散行列の平均を算出する共分散行列平均手段と、
前記共分散行列平均手段において算出した平均の共分散行列を固有値分解し、その固有値スペクトルに対して、点目標数をパラメータとする信号の統計モデルの適合度を測る指標算出する統計モデル適合度指標算出手段と、
前記統計モデル適合度指標算出手段において算出された統計モデル適合度指標が最小となる位置ずれ量を、位置ずれ量の推定値として出力する位置ずれ判定手段と,
前記位置ずれ判定手段において判定された位置ずれ量に基づいて位相補償を施した各レーダの信号に対応する共分散行列の平均の共分散行列を出力する合成共分散行列選択手段と
を備えることを特徴とする請求項1に記載のレーダ装置。
【請求項4】
前記各レーダで観測したレンジプロフィールの相互相関関数を算出する相互相関関数算出手段と、
相互相関関数のピークを検索することにより、前記各レーダの信号の間の位置ずれを大まかに推定し、前記共分散行列合成手段において様々に仮定する位置ずれ量の設定範囲を絞る位置ずれ粗推定手段と
を備えることを特徴とする請求項2または3に記載のレーダ装置。
【請求項5】
前記位置ずれ粗推定手段は、前記共分散行列合成手段において様々に仮定する位置ずれ量の設定範囲として、相互相関関数のピークに対して、前記各レーダの距離分解能程度あるいは各レーダの距離分解能のうち最も低い距離分解能の範囲とすることを特徴とする請求項4に記載のレーダ装置。
【請求項6】
前記統計モデル適合度指標算出手段は、統計モデルの適合度を測る指標として、赤池情報基準(AIC:Akaike Information Criteria)を採用することを特徴とする請求項3に記載のレーダ装置。
【請求項7】
前記統計モデル適合度指標算出手段は、統計モデルの適合度を測る指標として、MDL(Minimum Description Length)を採用することを特徴とする請求項3に記載のレーダ装置。
【請求項8】
前記超解像レンジ圧縮手段において、超解像アルゴリズムとしてCapon法を用いることを特徴とする請求項1乃至7の何れか1項に記載のレーダ装置。
【請求項9】
前記超解像レンジ圧縮手段において、超解像アルゴリズムとしてMUSIC法を用いることを特徴とする請求項1乃至7の何れか1項に記載のレーダ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−42372(P2012−42372A)
【公開日】平成24年3月1日(2012.3.1)
【国際特許分類】
【出願番号】特願2010−184697(P2010−184697)
【出願日】平成22年8月20日(2010.8.20)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成24年3月1日(2012.3.1)
【国際特許分類】
【出願日】平成22年8月20日(2010.8.20)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]