
物体識別装置
【課題】放射物体と反射物体とを容易に識別可能な物体識別装置を提供する。
【解決手段】物体A,Bから放射される電波領域での放射量を検出し、その検出結果に基づいて電波放射強度画像を生成する電波イメージング部200と、前記電波放射強度画像を時系列的に蓄積するとともに、その蓄積した複数の電波放射強度画像を比較して電波放射強度画像の時系列的な偏差を演算する画像演算部300と、電波イメージング部200で生成した電波放射強度画像と画像演算部300で演算した時系列的な偏差情報に基づいて物体A,Bを認識する認識処理手段(放射量演算部400および物体認識処理部500)とを備え、前記認識処理手段は、電波放射強度画像のうち時系列的な偏差が所定値以上大きい部分には反射率の大きい反射物体が存在すると判断し、電波放射強度画像から反射物体を除外することにより、反射物体と放射物体とを識別する。
【解決手段】物体A,Bから放射される電波領域での放射量を検出し、その検出結果に基づいて電波放射強度画像を生成する電波イメージング部200と、前記電波放射強度画像を時系列的に蓄積するとともに、その蓄積した複数の電波放射強度画像を比較して電波放射強度画像の時系列的な偏差を演算する画像演算部300と、電波イメージング部200で生成した電波放射強度画像と画像演算部300で演算した時系列的な偏差情報に基づいて物体A,Bを認識する認識処理手段(放射量演算部400および物体認識処理部500)とを備え、前記認識処理手段は、電波放射強度画像のうち時系列的な偏差が所定値以上大きい部分には反射率の大きい反射物体が存在すると判断し、電波放射強度画像から反射物体を除外することにより、反射物体と放射物体とを識別する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は物体識別装置に係り、特に放射物体と反射物体とを識別する物体識別装置に関する。
【背景技術】
【0002】
従来から、自動車周囲の物体を観測する装置の開発がなされている。車両に搭載される外界認識装置としては、一般的にレーダ装置のように電波の反射量を測定するものや、遠赤外線カメラのように熱の放射量を観測するものがある。そして主に、車両を検出する装置としてはレーダ装置が用いられ、歩行者を検出する装置としては遠赤外線カメラが用いられている。
【0003】
レーダ装置は、電波を送信して、所定値以上の強度の反射信号を検出することで物体の存在を検出し、送受信間の時間差などから物体までの距離を観測する。遠赤外線カメラは、物体から放射される遠赤外線などを検出し、人の体温に近いものを検知するのに適している。また、遠赤外線カメラで高温部の検出を行うことで、車両を検知する方式も提案されている(例えば、特許文献1参照)。
【特許文献1】特開2002−98509号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、電波レーダなどの反射量を観測する方式の場合、反射量の強弱から観測物体の判断を行っているが、反射特性は物体の表面性状に大きく依存する傾向があり、反射量から物体の識別を正確に行うことは難しい。また、遠赤外線カメラなどの放射量の観測は受動方式で表面性状による影響は少なく、放射物体の形状や放射量から観測物体の物性を判断できるが、放射物体と反射物体が混在する場合に、反射物体の表面への他の放射物体からの放射が映り込み、誤検出が発生する。
【0005】
上記特許文献1に示された方式では、自動車の排気管などの高温部を検出することで自動車と判断しているが、検出部分が微小であり車体などで遮蔽される可能性があることや、対向車などの車両正面では高温部が検出されず、非検出となるといった問題点がある。
【0006】
また、悪天候への対応として電波イメージング装置を用いた電波領域の放射量観測を行う装置も検討されているが、電波領域では金属は反射率がほぼ「1」で放射率や透過率はほとんど「0」に近いため、金属自体の放射量は観測されず、周囲に存在する他の物体の放射が金属表面で反射されて観測され、金属が放射物体であるかのように誤認識することがある。一般道路環境では金属などの反射率の高い物体と人体などの放射物体が混在する環境が多く存在し、上記虚像の観測によって、物体の誤検出が生じてしまうという問題点もある。
【0007】
本発明の課題は、放射物体と反射物体とを容易に識別可能な物体識別装置を提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明の特徴部分は、物体から放射される電波放射量の時間変動を計測し、その時間変動が所定値以上の偏差をもって変動する空間領域には、反射特性の大きい素材で構成される物体が存在すると判断することである。
【0009】
すなわち、本発明は、物体から放射される電波領域での放射量を検出し、その検出結果に基づいて電波放射強度画像を生成する電波放射強度画像生成手段と、該電波放射強度画像生成手段で生成された電波放射強度画像を時系列的に蓄積するとともに、その蓄積した複数の電波放射強度画像を比較して電波放射強度画像の時系列的な偏差を演算する画像演算手段と、前記電波放射強度画像生成手段で生成した電波放射強度画像と前記画像演算手段で演算した時系列的な偏差情報に基づいて前記物体を認識する認識処理手段とを備え、前記認識処理手段は、前記電波放射強度画像のうち時系列的な前記偏差が所定値以上大きい部分には反射率の大きい反射物体が存在すると判断し、電波放射強度画像から前記反射物体を除外することにより、反射物体と放射率の大きい放射物体とを識別することを特徴としている。
【発明の効果】
【0010】
本発明によれば、電波放射強度画像のうち時系列的な偏差が所定値以上大きい部分には反射率の大きい反射物体が存在すると判断して、その反射物体を電波放射強度画像から除外することができるので、反射物体と放射物体とを容易に識別することができる。
【発明を実施するための最良の形態】
【0011】
以下、本発明の実施例を図面に従って説明する。
【実施例1】
【0012】
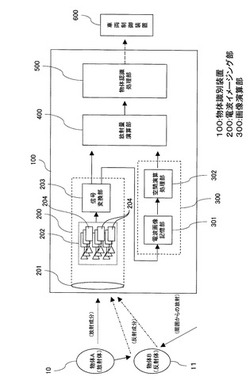
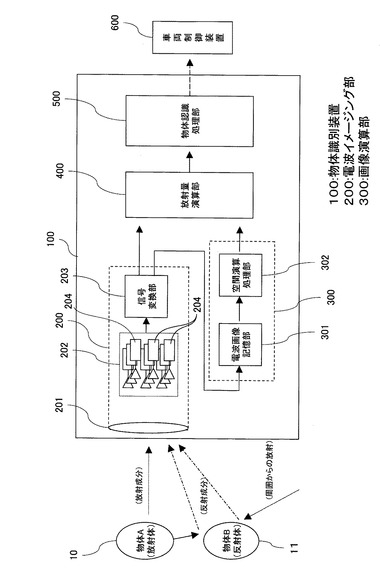
図1は、実施例1による物体識別装置のブロック構成図である。図1に示すように、物体検出装置100は、電波イメージング部200、画像演算部300、放射量演算部400および物体認識処理部500を有している。
【0013】
電波イメージング部200は、その前方空間に存在する物体A(符号10)および物体B(符号11)からの放射を検出し電波領域での放射強度画像を取得する。画像演算部300は、電波イメージング部200で取得された放射強度画像を所定回数蓄積(記憶)するとともに、蓄積した複数の放射強度画像を比較して放射強度画像の変動の算出を行って放射強度偏差画像を求める。放射量演算部400は、電波イメージング部200で取得された放射強度画像から放射強度ごとに空間領域を分類した放射強度分布画像を生成し、放射物体が存在する領域を抽出する。また、物体認識処理部500は、画像演算部300で得られた放射強度偏差画像と放射量演算部400で検出された放射強度分布画像とから、放射物体である物体Aの検出と反射物体である物体Bの検出を行う。
【0014】
ここで、上記各部の機能を更に詳しく説明する。
【0015】
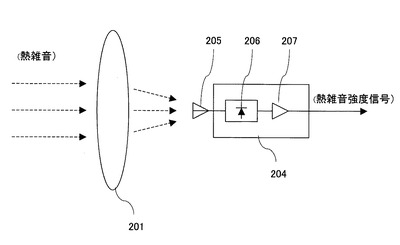
電波イメージング部200は、観測する電波放射を透過させる誘電体レンズ201、電波放射を観測する電波受信素子204がマトリックス状に配置されたイメージングアレイ部202、および各アレイ素子で観測された熱雑音量をマトリックス状に並べて熱雑音画像を生成する信号変換部203から構成されている。
【0016】
図2は、電波イメージング部200の動作イメージを説明する図である。前方のある方向から放射された熱雑音が誘電体レンズ201で集光され、一つの電波受信素子204で受信される。電波受信素子204は、受信アンテナ205、検波部206および信号増幅部207から構成されている。電波受信素子204は観測波長に整合されたものとなっており、熱雑音信号中から所望の波長成分のみの信号強度を出力する。電波受信素子204をマトリックス状に配置し各電波受信素子から出力される受信信号強度を組み合わせることで、図3に示すような電波放射の強度画像を生成することができる。
【0017】
また、図1に示すように、画像演算部300は、電波イメージング部200から出力される電波放射の強度画像を蓄積する電波画像記憶部301と、電波画像記憶部301に蓄積した強度画像の空間領域ごとに時間変化に対する強度変動の偏差を求める演算を行う空間演算処理部302とから構成され、各空間領域ごとに空間演算を行い、強度変動の偏差画像を出力する。
【0018】
放射量演算部400は、電波イメージング部200から出力される電波放射の強度画像から、放射量強度ごとに空間領域を分割して、物体A,Bの位置や形状および放射量を出力する。
【0019】
物体認識処理部500は、画像演算部300で得られた放射強度の偏差画像から電波領域において反射特性の大きい素材で構成される物体の位置および形状を検出し、放射量演算部400から出力される放射物体の情報から、反射特性の大きい物体の空間位置と重なり合う放射物体の情報を、映り込みによる偽像と判断し、放射物体と反射物体を分別して識別処理を行う。
【0020】
なお、本実施例では、電波イメージング部200は電波放射強度画像生成手段を、画像演算部300は画像演算手段を、放射量演算部400と物体認識処理部500は認識処理部をそれぞれ構成している。
【0021】
ここで、物体からの放射について説明する。
【0022】
一般的に、ある温度の物体の表面からは、その温度に応じて定まった放射エネルギー(電磁波)が放射されている。物体の放射率をε、ある温度の黒体から放射されるエネルギーをE0とすると、ある温度の物体から放射されるエネルギーEは、以下の(1)式で表される。
E = ε × E0 ・・・・・・・・・・・・(1)
【0023】
黒体から放射されるエネルギーについては、プランクの放射則で算出できるが、放射率は、物体の種類、表面状態および測定条件(温度、波長、物体に対する物体識別装置の検出角度等)によって変化することが知られている。物質の放射率は、その物質が放射を吸収する割合に等しく、その物体の反射率と透過率との間には、以下の(2)式の関係が成立する。
「反射率」+「吸収(放射)率」+「透過率」=1 ・・・・・・・・・・・・(2)
【0024】
放射量を観測する装置として、遠赤外線カメラや電波イメージング装置がある。
【0025】
これら放射量を観測する装置は受動方式で表面性状による影響は少なく、放射物体の形状や放射量から観測物体の物性を判断できるが、放射物体と反射物体が混在する場合に、反射物体表面での映り込みなどで誤検出することがある。
【0026】
車両用としては、悪天候へ対応することが好ましく、電波イメージング装置を用いた装置が検討されているが、電波領域では金属は反射率がほぼ「1」で放射率や透過率はほとんど「0」に近いため、金属自体の放射量の観測は難しい。実際に金属などの反射率の大きい物体を観測した場合、周囲に存在する他の物体の放射が金属表面で反射されて観測される。つまり、図1の物体Aの放射が物体Bの表面で反射し、物体Bが放射物体であるかのように誤認識することがある。一般道路環境では金属などの反射率の高い物体と人体などの放射物体が混在する環境が多く存在し、上記虚像の観測によって、物体の誤検出が生じてしまっていた。
【0027】
本実施例では、電波放射量を観測する電波イメージング装置を用いた受動系の放射量観測において、電波領域での放射率0、反射率1の特性を有する金属などの領域を抽出することにより、上記映り込みによる誤検出を抑制している。
【0028】
すなわち、本実施例では、電波イメージング部200から出力される放射強度画像を一定時間蓄積する電波画像記憶部301と、放射強度画像の画素ごとに時間変化に対する強度変動の偏差を算出する空間演算処理部302を設け、所定値以上の偏差をもって変動する領域には観測電波領域での反射率の大きい物体が存在すると判断し、放射強度画像からの放射物体識別処理から除外することで、放射物体と反射物体とを分別して検出することを可能としている。
【0029】
図3および図4は、観測結果の一例を示している。
【0030】
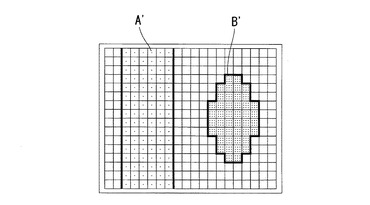
図3は、移動状態において、放射率の大きい物体Aと反射率の大きい物体Bを電波イメージング装置で観測した場合に取得される画像イメージであり、図3(a)は時刻t0におけるものを、(b)は時刻t0+Δtにおけるものを、(c)は時刻t0+2Δtにおけるものをそれぞれ示している。なお、本実施例においては、物体Aは電柱であり、物体Bは車両である。画像イメージとしては、電柱の画像A’および車両の画像B’が表示されている。
【0031】
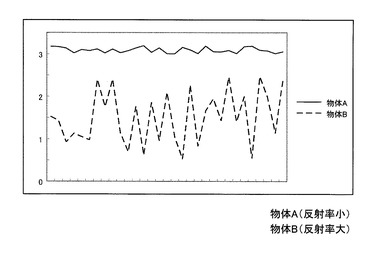
図3に示すように、放射率の大きい物体A(画像A’)の場合、時間変化に対してほとんど変化(画像の濃淡変化)は無く、一様な放射量の観測ができている。しかしながら、反射率の大きい物体B(画像B’)の場合、物体Bの放射は観測されず、周囲物体から放射が映り込んで観測(つまり、画像の大きな濃淡変化が観測)されており、移動状態で観測した場合には、図4に示すように、時間変化に対して変動して検出される。
【0032】
よって、放射強度画像で観測される放射量の時間変動を検出し、偏差を求めることで反射物体であるか否かを判断できる。
【0033】
画像演算部300では、図3のような放射画像から、図4に示すような時間変化を観測し、放射量の変動偏差を算出し、図5に示すような放射量変動偏差画像を生成する。図5においては、物体A(電柱)の画像A’は濃淡が薄く、物体B(車両)の画像B’の濃淡は濃くなっている。
【0034】
物体認識処理部500では、画像演算部300から出力された放射量変動偏差画像から所定の閾値以上の偏差を有する空間領域に反射特性の大きい物体が存在することを検出し、対応する空間領域では放射量演算部400から出力された放射物体の情報を除外することで、放射物体と反射物体を分別した認識処理を行い、識別された物体の情報を車両制御装置600(車両制御CPUなど)に出力する。また、放射物体のみを抽出した物体情報や反射物体のみを抽出した物体情報を出力することもできる。
【0035】
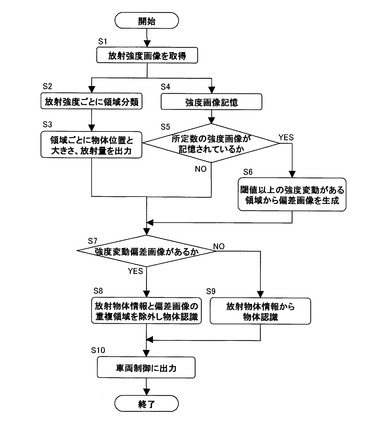
図6は、本実施例による物体識別装置の動作フローを示している。
【0036】
先ず、物体識別装置100の前方にある物体A,Bからの放射を電波イメージング部200で観測し電波放射画像を取得して(ステップS1)、その電波放射画像を画像演算部300と放射量演算部400へ出力をする。
【0037】
画像演算部300では、電波放射画像を配列として記憶するとともに(ステップS4)、所定数の電波放射画像が記憶されているか確認する(ステップS5)。所定数の電波放射画像を記憶されている場合には、各画素ごとに変動偏差を算出し、閾値以上の偏差が観測される画素のみを表示する偏差画像を生成する(ステップS6)。(所定数の電波放射画像を記憶されていない場合には、偏差画像は生成せずにステップS7に進む。)
【0038】
一方、放射量演算部400では、ステップS1において取得した電波放射画像の放射量の強度で領域を分類し(ステップS2)、分類された領域ごとにその放射量、および物体の位置と大きさなどの空間位置情報を抽出し出力する(ステップS3)。
【0039】
物体認識処理部500では、画像演算部300からの偏差画像と放射量演算部400からの放射体情報とから、強度偏差画像において閾値以上の変動を示す領域が存在するか否か判断し(ステップS7)、存在する場合は放射画像から強度偏差画像における上記領域を除外し(ステップS8)、存在しない場合は放射量情報から放射物判定を行う(ステップS9)。そして、ステップS8またはステップS9での処理の後、車両制御装置600に対して車両制御信号を出力する(ステップS10)。
【0040】
このように、本実施例では、電波イメージング部200に放射量の変動を観測する機能を加え、放射物体と反射物体を分別して認識を行うようにすることで、より正確な物体認識が可能となる。
【0041】
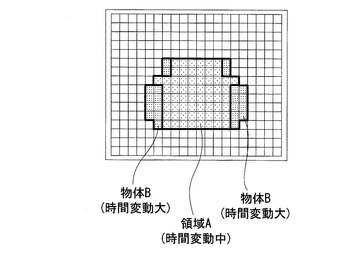
なお、観測する物体が自動車などの立体物である場合には、車体角部などの表面曲率の小さい部分と表面曲率の大きい部分が混在する。これを電波イメージング部200で観測した場合、図7に示すように、曲率の小さい部分は狭い範囲の周辺放射が観測されるため強度変動は少ない(濃淡が薄い)が、車体角部などの表面曲率の大きい部位では放射量変動偏差が他の部位と比較して大きく(濃淡が濃く)観測される。よって、物体認識処理部500において、画像演算部300から出力された放射量変動偏差画像の変動偏差を判断する閾値を2段階とし、第一の閾値で放射量変動が存在すると判断された領域において、第一の閾値(所定値)より大きな第二の閾値(第二所定値)で更に変動の大きな部位を特定する。これにより、反射物体の端部を検出することができ、反射物体の識別において、より安定した形状識別を行うことができるようになる。
【0042】
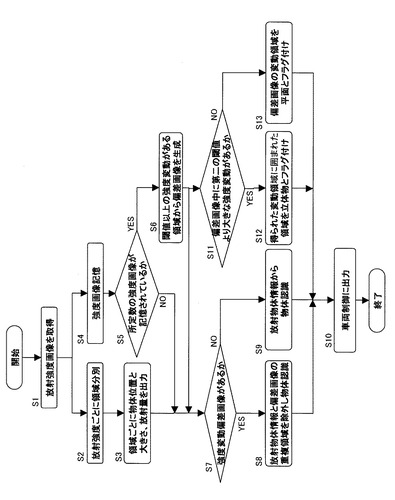
図8は、立体物であることを検出する動作フローを示している。
【0043】
これは、画像演算部300にて生成された偏差画像から、第二の閾値を用いてさらに大きな変動がある部位を抽出する動作である。図8において、ステップS1〜ステップS10までは図6の動作フローと同一であり、説明を割愛する。
【0044】
ステップS6にて生成された偏差画像内に第二の閾値を越える変動偏差があるか否かを判断する(ステップS11)。第二の閾値を越える変動偏差があれば、その部位で囲まれた変動偏差の存在する領域に立体物フラグを付加し(ステップS12)、第二の閾値を超える変動偏差がなければ、変動偏差領域に平面物フラグを付加する(ステップS13)。そして、車両制御CPUに結果を出力する(ステップS10)。
【0045】
上記の動作は、物体識別装置を搭載した車両と観測対象となる前方車両とが相対速度を持った場合において、放射強度の変動偏差を観測することを前提と説明してきたが、先行車の対地車速が零で無い状況や自車両の対地車速が零で無い状況でも同様に上記処理によって、同様の効果を得ることができる。
【0046】
また、電波イメージング装置は電磁波を放射しないため、使用する観測帯域に制限は無いが、より遠距離までの物体観測を行うためには大気の伝搬減衰の影響が少ない30〜40GHz帯もしくは90〜100GHz帯に設定するのが好ましい。
【0047】
以上のとおり、本実施例によれば、物体からの放射を電波領域で観測する電波イメージング装置を用いて、放射画像の時間変動から観測される物体の反射物性を判別し、放射物体と反射物体を分別して認識処理を行うことができ、表面性状や形状などに依存しない物体識別を行うことができる。
【実施例2】
【0048】
実施例1は、受動式の放射量観測手段を用いて反射率「1」、放射率「0」の金属領域の検出および金属表面への映り込みによる誤検出を対策する手法であった。
【0049】
受動方式においては、検出画面上に占める金属領域は分かるが、その金属領域が近くに存在する小さな看板か、遠くに存在する大きな車両かの判断はできない。そこで、実施例1で検出される金属領域の情報をさらに有用なものとするため、本実施例においては、内蔵もしくは別体のレーダ装置をさらに備え、実施例1で検出された金属領域までの距離計測を行い、物体の投影面積を算出する機能が設けられている。
【0050】
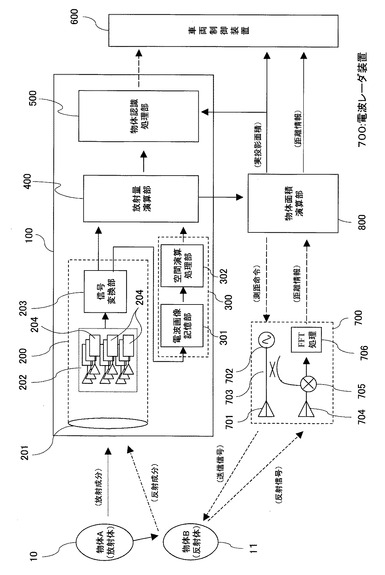
図9は、本実施例による物体識別装置のブロック構成図である。本実施例では、実施例1の構成に加えて、電波レーダ装置700および物体面積演算部800が設けられている。
【0051】
電波レーダ装置700は、送信アンテナ701、発振器702、電力分配器703、受信アンテナ704、ミキサ部705およびFFT処理演算部706から構成される。発振器702からの周波数変調された送信信号が、電力分配器703でミキサ部705と送信アンテナ701に分配され出力される。送信アンテナ701から送出された送信信号は物体Bで反射し、反射信号が受信アンテナ704で検出される。検出された反射信号はミキサ部705で送信信号と掛け算され、送受信の差分周波数のIF信号が出力される。FFT演算処理部706ではIF信号の周波数解析を行うことで、伝搬に要する時間遅延量を検出し、物体Bまでの距離を出力する。
【0052】
物体面積演算部800では、実施例1で検出された金属領域と電波レーダ装置700から出力された距離とを用いて、物体Bの投影面積を算出し、物体認識処理部500に結果を出力する。
【0053】
物体認識処理部500では、実施例1で得られた放射物体(物体A)および反射物体(物体B)の情報に加えて、反射物体(物体B)の投影面積の情報を用いることで、反射物体(物体B)の識別をより正確に判断できるようになる。
【0054】
なお、本実施例では、電波レーダ装置700はレーダ装置を、物体面積演算部800は投影面積算出手段をそれぞれ構成している。
【0055】
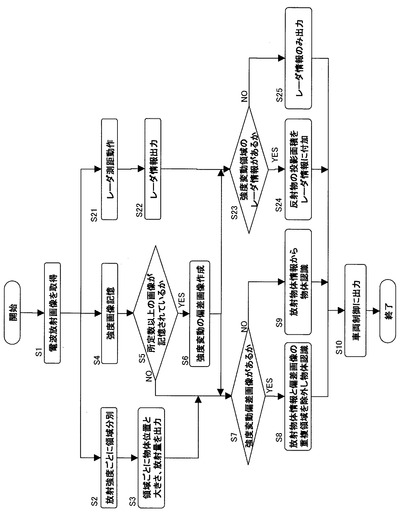
図10は、本実施例による物体識別装置の動作フローを示している。ここでは、実施例1との動作の差異を中心に述べる。電波イメージング部200で電波放射画像の取得(ステップS1)を行った後に、電波レーダ装置700から前方に向けて電磁波の送受信を行って、FFT処理演算部706で前方物体までの距離を計測し(ステップS21)、その計測結果を物体面積演算部800に出力する(ステップS22)。
【0056】
物体面積演算部800では、物体識別装置100から入力される反射物体の領域情報とレーダ装置700から入力された反射物体の方位情報が合致するか否かを判定し(ステップS23)、合致する場合には、変動偏差画像の領域情報とレーダからの距離情報から反射物体の投影面積を算出し(ステップS24)、その算出結果を車両制御装置600に出力する。合致しない場合には、レーダ情報のみを車両制御装置600に出力する(ステップS25)。
【0057】
上記動作フローの説明では、電波レーダ装置700からの出力信号が、電波イメージング部200で観測される電波領域へ影響を及ぼさないために、交互に行うようにしたが、周波数領域を隔てて使用すれば、並列に動作させてもよい。また。レーダ装置として、電波レーダ装置700を用いたが、電波イメージング部200に影響を与えない近赤外線レーザを用いた光レーダなどを用いても良い。
【0058】
以上のように、本実施例によれば、放射量観測における時間変動を観測する処理に加え、レーダ装置での距離情報を用いることで、反射率の大きい物体と放射率の大きい物体が混在する状況においても、物性違いを誤検出することなく、さらに反射物体の投影面積を検出することで反射物体の識別をより正確に行うことができるようになる。
【0059】
なお、以上説明した各実施例は、本発明の理解を容易にするために記載されたものであって、本発明を限定するために記載されたものではない。したがって、上記各実施例に開示された各要素は、本発明の技術的範囲に属する全ての設計変更や均等物をも含む趣旨である。
【図面の簡単な説明】
【0060】
【図1】実施例1による物体識別装置のブロック構成図である。
【図2】電波イメージング部内のアレイ素子の構造を示す図である。
【図3】電波イメージング部で検出される放射物体と反射物体の電波放射画像のイメージを示しており、(a)は時刻t0における図、(b)は時刻t0+Δtにおける図を、(c)は時刻t0+2Δtにおける図である。
【図4】図3における放射物体と反射物体の電波放射の時間変化を説明する図である。
【図5】立体物を観測した場合の変動偏差画像のイメージ図である。
【図6】実施例1による物体識別装置の動作フロー図である。
【図7】立体物を観測した場合の変動偏差画像のイメージ図である。
【図8】立体物であることを検出する動作フロー図である。
【図9】実施例2による物体識別装置のブロック構成図である。
【図10】実施例2による物体識別装置の動作フロー図である。
【符号の説明】
【0061】
10 物体A(放射物体)
11 物体B(反射物体)
100 物体識別装置
200 電波イメージング部
201 誘電体レンズ
202 イメージングアレイ部
203 信号変換部
205 受信アンテナ
206 検波器
207 信号増幅器
300 画像演算部
301 電波画像記憶部
302 空間演算処理部
400 放射量演算部
500 物体認識処理部
600 車両制御装置
700 電波レーダ装置
701 送信アンテナ
702 発振器
703 電力分配器
704 受信アンテナ
705 ミキサ部
706 FFT演算処理部
800 物体面積演算部
【技術分野】
【0001】
本発明は物体識別装置に係り、特に放射物体と反射物体とを識別する物体識別装置に関する。
【背景技術】
【0002】
従来から、自動車周囲の物体を観測する装置の開発がなされている。車両に搭載される外界認識装置としては、一般的にレーダ装置のように電波の反射量を測定するものや、遠赤外線カメラのように熱の放射量を観測するものがある。そして主に、車両を検出する装置としてはレーダ装置が用いられ、歩行者を検出する装置としては遠赤外線カメラが用いられている。
【0003】
レーダ装置は、電波を送信して、所定値以上の強度の反射信号を検出することで物体の存在を検出し、送受信間の時間差などから物体までの距離を観測する。遠赤外線カメラは、物体から放射される遠赤外線などを検出し、人の体温に近いものを検知するのに適している。また、遠赤外線カメラで高温部の検出を行うことで、車両を検知する方式も提案されている(例えば、特許文献1参照)。
【特許文献1】特開2002−98509号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、電波レーダなどの反射量を観測する方式の場合、反射量の強弱から観測物体の判断を行っているが、反射特性は物体の表面性状に大きく依存する傾向があり、反射量から物体の識別を正確に行うことは難しい。また、遠赤外線カメラなどの放射量の観測は受動方式で表面性状による影響は少なく、放射物体の形状や放射量から観測物体の物性を判断できるが、放射物体と反射物体が混在する場合に、反射物体の表面への他の放射物体からの放射が映り込み、誤検出が発生する。
【0005】
上記特許文献1に示された方式では、自動車の排気管などの高温部を検出することで自動車と判断しているが、検出部分が微小であり車体などで遮蔽される可能性があることや、対向車などの車両正面では高温部が検出されず、非検出となるといった問題点がある。
【0006】
また、悪天候への対応として電波イメージング装置を用いた電波領域の放射量観測を行う装置も検討されているが、電波領域では金属は反射率がほぼ「1」で放射率や透過率はほとんど「0」に近いため、金属自体の放射量は観測されず、周囲に存在する他の物体の放射が金属表面で反射されて観測され、金属が放射物体であるかのように誤認識することがある。一般道路環境では金属などの反射率の高い物体と人体などの放射物体が混在する環境が多く存在し、上記虚像の観測によって、物体の誤検出が生じてしまうという問題点もある。
【0007】
本発明の課題は、放射物体と反射物体とを容易に識別可能な物体識別装置を提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明の特徴部分は、物体から放射される電波放射量の時間変動を計測し、その時間変動が所定値以上の偏差をもって変動する空間領域には、反射特性の大きい素材で構成される物体が存在すると判断することである。
【0009】
すなわち、本発明は、物体から放射される電波領域での放射量を検出し、その検出結果に基づいて電波放射強度画像を生成する電波放射強度画像生成手段と、該電波放射強度画像生成手段で生成された電波放射強度画像を時系列的に蓄積するとともに、その蓄積した複数の電波放射強度画像を比較して電波放射強度画像の時系列的な偏差を演算する画像演算手段と、前記電波放射強度画像生成手段で生成した電波放射強度画像と前記画像演算手段で演算した時系列的な偏差情報に基づいて前記物体を認識する認識処理手段とを備え、前記認識処理手段は、前記電波放射強度画像のうち時系列的な前記偏差が所定値以上大きい部分には反射率の大きい反射物体が存在すると判断し、電波放射強度画像から前記反射物体を除外することにより、反射物体と放射率の大きい放射物体とを識別することを特徴としている。
【発明の効果】
【0010】
本発明によれば、電波放射強度画像のうち時系列的な偏差が所定値以上大きい部分には反射率の大きい反射物体が存在すると判断して、その反射物体を電波放射強度画像から除外することができるので、反射物体と放射物体とを容易に識別することができる。
【発明を実施するための最良の形態】
【0011】
以下、本発明の実施例を図面に従って説明する。
【実施例1】
【0012】
図1は、実施例1による物体識別装置のブロック構成図である。図1に示すように、物体検出装置100は、電波イメージング部200、画像演算部300、放射量演算部400および物体認識処理部500を有している。
【0013】
電波イメージング部200は、その前方空間に存在する物体A(符号10)および物体B(符号11)からの放射を検出し電波領域での放射強度画像を取得する。画像演算部300は、電波イメージング部200で取得された放射強度画像を所定回数蓄積(記憶)するとともに、蓄積した複数の放射強度画像を比較して放射強度画像の変動の算出を行って放射強度偏差画像を求める。放射量演算部400は、電波イメージング部200で取得された放射強度画像から放射強度ごとに空間領域を分類した放射強度分布画像を生成し、放射物体が存在する領域を抽出する。また、物体認識処理部500は、画像演算部300で得られた放射強度偏差画像と放射量演算部400で検出された放射強度分布画像とから、放射物体である物体Aの検出と反射物体である物体Bの検出を行う。
【0014】
ここで、上記各部の機能を更に詳しく説明する。
【0015】
電波イメージング部200は、観測する電波放射を透過させる誘電体レンズ201、電波放射を観測する電波受信素子204がマトリックス状に配置されたイメージングアレイ部202、および各アレイ素子で観測された熱雑音量をマトリックス状に並べて熱雑音画像を生成する信号変換部203から構成されている。
【0016】
図2は、電波イメージング部200の動作イメージを説明する図である。前方のある方向から放射された熱雑音が誘電体レンズ201で集光され、一つの電波受信素子204で受信される。電波受信素子204は、受信アンテナ205、検波部206および信号増幅部207から構成されている。電波受信素子204は観測波長に整合されたものとなっており、熱雑音信号中から所望の波長成分のみの信号強度を出力する。電波受信素子204をマトリックス状に配置し各電波受信素子から出力される受信信号強度を組み合わせることで、図3に示すような電波放射の強度画像を生成することができる。
【0017】
また、図1に示すように、画像演算部300は、電波イメージング部200から出力される電波放射の強度画像を蓄積する電波画像記憶部301と、電波画像記憶部301に蓄積した強度画像の空間領域ごとに時間変化に対する強度変動の偏差を求める演算を行う空間演算処理部302とから構成され、各空間領域ごとに空間演算を行い、強度変動の偏差画像を出力する。
【0018】
放射量演算部400は、電波イメージング部200から出力される電波放射の強度画像から、放射量強度ごとに空間領域を分割して、物体A,Bの位置や形状および放射量を出力する。
【0019】
物体認識処理部500は、画像演算部300で得られた放射強度の偏差画像から電波領域において反射特性の大きい素材で構成される物体の位置および形状を検出し、放射量演算部400から出力される放射物体の情報から、反射特性の大きい物体の空間位置と重なり合う放射物体の情報を、映り込みによる偽像と判断し、放射物体と反射物体を分別して識別処理を行う。
【0020】
なお、本実施例では、電波イメージング部200は電波放射強度画像生成手段を、画像演算部300は画像演算手段を、放射量演算部400と物体認識処理部500は認識処理部をそれぞれ構成している。
【0021】
ここで、物体からの放射について説明する。
【0022】
一般的に、ある温度の物体の表面からは、その温度に応じて定まった放射エネルギー(電磁波)が放射されている。物体の放射率をε、ある温度の黒体から放射されるエネルギーをE0とすると、ある温度の物体から放射されるエネルギーEは、以下の(1)式で表される。
E = ε × E0 ・・・・・・・・・・・・(1)
【0023】
黒体から放射されるエネルギーについては、プランクの放射則で算出できるが、放射率は、物体の種類、表面状態および測定条件(温度、波長、物体に対する物体識別装置の検出角度等)によって変化することが知られている。物質の放射率は、その物質が放射を吸収する割合に等しく、その物体の反射率と透過率との間には、以下の(2)式の関係が成立する。
「反射率」+「吸収(放射)率」+「透過率」=1 ・・・・・・・・・・・・(2)
【0024】
放射量を観測する装置として、遠赤外線カメラや電波イメージング装置がある。
【0025】
これら放射量を観測する装置は受動方式で表面性状による影響は少なく、放射物体の形状や放射量から観測物体の物性を判断できるが、放射物体と反射物体が混在する場合に、反射物体表面での映り込みなどで誤検出することがある。
【0026】
車両用としては、悪天候へ対応することが好ましく、電波イメージング装置を用いた装置が検討されているが、電波領域では金属は反射率がほぼ「1」で放射率や透過率はほとんど「0」に近いため、金属自体の放射量の観測は難しい。実際に金属などの反射率の大きい物体を観測した場合、周囲に存在する他の物体の放射が金属表面で反射されて観測される。つまり、図1の物体Aの放射が物体Bの表面で反射し、物体Bが放射物体であるかのように誤認識することがある。一般道路環境では金属などの反射率の高い物体と人体などの放射物体が混在する環境が多く存在し、上記虚像の観測によって、物体の誤検出が生じてしまっていた。
【0027】
本実施例では、電波放射量を観測する電波イメージング装置を用いた受動系の放射量観測において、電波領域での放射率0、反射率1の特性を有する金属などの領域を抽出することにより、上記映り込みによる誤検出を抑制している。
【0028】
すなわち、本実施例では、電波イメージング部200から出力される放射強度画像を一定時間蓄積する電波画像記憶部301と、放射強度画像の画素ごとに時間変化に対する強度変動の偏差を算出する空間演算処理部302を設け、所定値以上の偏差をもって変動する領域には観測電波領域での反射率の大きい物体が存在すると判断し、放射強度画像からの放射物体識別処理から除外することで、放射物体と反射物体とを分別して検出することを可能としている。
【0029】
図3および図4は、観測結果の一例を示している。
【0030】
図3は、移動状態において、放射率の大きい物体Aと反射率の大きい物体Bを電波イメージング装置で観測した場合に取得される画像イメージであり、図3(a)は時刻t0におけるものを、(b)は時刻t0+Δtにおけるものを、(c)は時刻t0+2Δtにおけるものをそれぞれ示している。なお、本実施例においては、物体Aは電柱であり、物体Bは車両である。画像イメージとしては、電柱の画像A’および車両の画像B’が表示されている。
【0031】
図3に示すように、放射率の大きい物体A(画像A’)の場合、時間変化に対してほとんど変化(画像の濃淡変化)は無く、一様な放射量の観測ができている。しかしながら、反射率の大きい物体B(画像B’)の場合、物体Bの放射は観測されず、周囲物体から放射が映り込んで観測(つまり、画像の大きな濃淡変化が観測)されており、移動状態で観測した場合には、図4に示すように、時間変化に対して変動して検出される。
【0032】
よって、放射強度画像で観測される放射量の時間変動を検出し、偏差を求めることで反射物体であるか否かを判断できる。
【0033】
画像演算部300では、図3のような放射画像から、図4に示すような時間変化を観測し、放射量の変動偏差を算出し、図5に示すような放射量変動偏差画像を生成する。図5においては、物体A(電柱)の画像A’は濃淡が薄く、物体B(車両)の画像B’の濃淡は濃くなっている。
【0034】
物体認識処理部500では、画像演算部300から出力された放射量変動偏差画像から所定の閾値以上の偏差を有する空間領域に反射特性の大きい物体が存在することを検出し、対応する空間領域では放射量演算部400から出力された放射物体の情報を除外することで、放射物体と反射物体を分別した認識処理を行い、識別された物体の情報を車両制御装置600(車両制御CPUなど)に出力する。また、放射物体のみを抽出した物体情報や反射物体のみを抽出した物体情報を出力することもできる。
【0035】
図6は、本実施例による物体識別装置の動作フローを示している。
【0036】
先ず、物体識別装置100の前方にある物体A,Bからの放射を電波イメージング部200で観測し電波放射画像を取得して(ステップS1)、その電波放射画像を画像演算部300と放射量演算部400へ出力をする。
【0037】
画像演算部300では、電波放射画像を配列として記憶するとともに(ステップS4)、所定数の電波放射画像が記憶されているか確認する(ステップS5)。所定数の電波放射画像を記憶されている場合には、各画素ごとに変動偏差を算出し、閾値以上の偏差が観測される画素のみを表示する偏差画像を生成する(ステップS6)。(所定数の電波放射画像を記憶されていない場合には、偏差画像は生成せずにステップS7に進む。)
【0038】
一方、放射量演算部400では、ステップS1において取得した電波放射画像の放射量の強度で領域を分類し(ステップS2)、分類された領域ごとにその放射量、および物体の位置と大きさなどの空間位置情報を抽出し出力する(ステップS3)。
【0039】
物体認識処理部500では、画像演算部300からの偏差画像と放射量演算部400からの放射体情報とから、強度偏差画像において閾値以上の変動を示す領域が存在するか否か判断し(ステップS7)、存在する場合は放射画像から強度偏差画像における上記領域を除外し(ステップS8)、存在しない場合は放射量情報から放射物判定を行う(ステップS9)。そして、ステップS8またはステップS9での処理の後、車両制御装置600に対して車両制御信号を出力する(ステップS10)。
【0040】
このように、本実施例では、電波イメージング部200に放射量の変動を観測する機能を加え、放射物体と反射物体を分別して認識を行うようにすることで、より正確な物体認識が可能となる。
【0041】
なお、観測する物体が自動車などの立体物である場合には、車体角部などの表面曲率の小さい部分と表面曲率の大きい部分が混在する。これを電波イメージング部200で観測した場合、図7に示すように、曲率の小さい部分は狭い範囲の周辺放射が観測されるため強度変動は少ない(濃淡が薄い)が、車体角部などの表面曲率の大きい部位では放射量変動偏差が他の部位と比較して大きく(濃淡が濃く)観測される。よって、物体認識処理部500において、画像演算部300から出力された放射量変動偏差画像の変動偏差を判断する閾値を2段階とし、第一の閾値で放射量変動が存在すると判断された領域において、第一の閾値(所定値)より大きな第二の閾値(第二所定値)で更に変動の大きな部位を特定する。これにより、反射物体の端部を検出することができ、反射物体の識別において、より安定した形状識別を行うことができるようになる。
【0042】
図8は、立体物であることを検出する動作フローを示している。
【0043】
これは、画像演算部300にて生成された偏差画像から、第二の閾値を用いてさらに大きな変動がある部位を抽出する動作である。図8において、ステップS1〜ステップS10までは図6の動作フローと同一であり、説明を割愛する。
【0044】
ステップS6にて生成された偏差画像内に第二の閾値を越える変動偏差があるか否かを判断する(ステップS11)。第二の閾値を越える変動偏差があれば、その部位で囲まれた変動偏差の存在する領域に立体物フラグを付加し(ステップS12)、第二の閾値を超える変動偏差がなければ、変動偏差領域に平面物フラグを付加する(ステップS13)。そして、車両制御CPUに結果を出力する(ステップS10)。
【0045】
上記の動作は、物体識別装置を搭載した車両と観測対象となる前方車両とが相対速度を持った場合において、放射強度の変動偏差を観測することを前提と説明してきたが、先行車の対地車速が零で無い状況や自車両の対地車速が零で無い状況でも同様に上記処理によって、同様の効果を得ることができる。
【0046】
また、電波イメージング装置は電磁波を放射しないため、使用する観測帯域に制限は無いが、より遠距離までの物体観測を行うためには大気の伝搬減衰の影響が少ない30〜40GHz帯もしくは90〜100GHz帯に設定するのが好ましい。
【0047】
以上のとおり、本実施例によれば、物体からの放射を電波領域で観測する電波イメージング装置を用いて、放射画像の時間変動から観測される物体の反射物性を判別し、放射物体と反射物体を分別して認識処理を行うことができ、表面性状や形状などに依存しない物体識別を行うことができる。
【実施例2】
【0048】
実施例1は、受動式の放射量観測手段を用いて反射率「1」、放射率「0」の金属領域の検出および金属表面への映り込みによる誤検出を対策する手法であった。
【0049】
受動方式においては、検出画面上に占める金属領域は分かるが、その金属領域が近くに存在する小さな看板か、遠くに存在する大きな車両かの判断はできない。そこで、実施例1で検出される金属領域の情報をさらに有用なものとするため、本実施例においては、内蔵もしくは別体のレーダ装置をさらに備え、実施例1で検出された金属領域までの距離計測を行い、物体の投影面積を算出する機能が設けられている。
【0050】
図9は、本実施例による物体識別装置のブロック構成図である。本実施例では、実施例1の構成に加えて、電波レーダ装置700および物体面積演算部800が設けられている。
【0051】
電波レーダ装置700は、送信アンテナ701、発振器702、電力分配器703、受信アンテナ704、ミキサ部705およびFFT処理演算部706から構成される。発振器702からの周波数変調された送信信号が、電力分配器703でミキサ部705と送信アンテナ701に分配され出力される。送信アンテナ701から送出された送信信号は物体Bで反射し、反射信号が受信アンテナ704で検出される。検出された反射信号はミキサ部705で送信信号と掛け算され、送受信の差分周波数のIF信号が出力される。FFT演算処理部706ではIF信号の周波数解析を行うことで、伝搬に要する時間遅延量を検出し、物体Bまでの距離を出力する。
【0052】
物体面積演算部800では、実施例1で検出された金属領域と電波レーダ装置700から出力された距離とを用いて、物体Bの投影面積を算出し、物体認識処理部500に結果を出力する。
【0053】
物体認識処理部500では、実施例1で得られた放射物体(物体A)および反射物体(物体B)の情報に加えて、反射物体(物体B)の投影面積の情報を用いることで、反射物体(物体B)の識別をより正確に判断できるようになる。
【0054】
なお、本実施例では、電波レーダ装置700はレーダ装置を、物体面積演算部800は投影面積算出手段をそれぞれ構成している。
【0055】
図10は、本実施例による物体識別装置の動作フローを示している。ここでは、実施例1との動作の差異を中心に述べる。電波イメージング部200で電波放射画像の取得(ステップS1)を行った後に、電波レーダ装置700から前方に向けて電磁波の送受信を行って、FFT処理演算部706で前方物体までの距離を計測し(ステップS21)、その計測結果を物体面積演算部800に出力する(ステップS22)。
【0056】
物体面積演算部800では、物体識別装置100から入力される反射物体の領域情報とレーダ装置700から入力された反射物体の方位情報が合致するか否かを判定し(ステップS23)、合致する場合には、変動偏差画像の領域情報とレーダからの距離情報から反射物体の投影面積を算出し(ステップS24)、その算出結果を車両制御装置600に出力する。合致しない場合には、レーダ情報のみを車両制御装置600に出力する(ステップS25)。
【0057】
上記動作フローの説明では、電波レーダ装置700からの出力信号が、電波イメージング部200で観測される電波領域へ影響を及ぼさないために、交互に行うようにしたが、周波数領域を隔てて使用すれば、並列に動作させてもよい。また。レーダ装置として、電波レーダ装置700を用いたが、電波イメージング部200に影響を与えない近赤外線レーザを用いた光レーダなどを用いても良い。
【0058】
以上のように、本実施例によれば、放射量観測における時間変動を観測する処理に加え、レーダ装置での距離情報を用いることで、反射率の大きい物体と放射率の大きい物体が混在する状況においても、物性違いを誤検出することなく、さらに反射物体の投影面積を検出することで反射物体の識別をより正確に行うことができるようになる。
【0059】
なお、以上説明した各実施例は、本発明の理解を容易にするために記載されたものであって、本発明を限定するために記載されたものではない。したがって、上記各実施例に開示された各要素は、本発明の技術的範囲に属する全ての設計変更や均等物をも含む趣旨である。
【図面の簡単な説明】
【0060】
【図1】実施例1による物体識別装置のブロック構成図である。
【図2】電波イメージング部内のアレイ素子の構造を示す図である。
【図3】電波イメージング部で検出される放射物体と反射物体の電波放射画像のイメージを示しており、(a)は時刻t0における図、(b)は時刻t0+Δtにおける図を、(c)は時刻t0+2Δtにおける図である。
【図4】図3における放射物体と反射物体の電波放射の時間変化を説明する図である。
【図5】立体物を観測した場合の変動偏差画像のイメージ図である。
【図6】実施例1による物体識別装置の動作フロー図である。
【図7】立体物を観測した場合の変動偏差画像のイメージ図である。
【図8】立体物であることを検出する動作フロー図である。
【図9】実施例2による物体識別装置のブロック構成図である。
【図10】実施例2による物体識別装置の動作フロー図である。
【符号の説明】
【0061】
10 物体A(放射物体)
11 物体B(反射物体)
100 物体識別装置
200 電波イメージング部
201 誘電体レンズ
202 イメージングアレイ部
203 信号変換部
205 受信アンテナ
206 検波器
207 信号増幅器
300 画像演算部
301 電波画像記憶部
302 空間演算処理部
400 放射量演算部
500 物体認識処理部
600 車両制御装置
700 電波レーダ装置
701 送信アンテナ
702 発振器
703 電力分配器
704 受信アンテナ
705 ミキサ部
706 FFT演算処理部
800 物体面積演算部
【特許請求の範囲】
【請求項1】
物体から放射される電波領域での放射量を検出し、その検出結果に基づいて電波放射強度画像を生成する電波放射強度画像生成手段と、該電波放射強度画像生成手段で生成された電波放射強度画像を時系列的に蓄積するとともに、その蓄積した複数の電波放射強度画像を比較して電波放射強度画像の時系列的な偏差を演算する画像演算手段と、前記電波放射強度画像生成手段で生成した電波放射強度画像と前記画像演算手段で演算した時系列的な偏差情報に基づいて前記物体を認識する認識処理手段とを備え、
前記認識処理手段は、前記電波放射強度画像のうち時系列的な前記偏差が所定値以上大きい部分には反射率の大きい反射物体が存在すると判断し、電波放射強度画像から前記反射物体を除外することにより、反射物体と放射率の大きい放射物体とを識別することを特徴とする物体識別装置。
【請求項2】
前記所定値よりも更に大きい第二所定値が設定され、
前記認識処理手段は、前記電波放射強度画像のうち時系列的な前記偏差が前記第二所定値以上に大きくなる部分には、反射特性の大きい素材で構成された立体物が存在すると判断することを特徴とする請求項1に記載の物体識別装置。
【請求項3】
前記認識処理手段は、反射物体が存在すると判断した領域内では、電波放射量による物体認識を適用しないことを特徴とする請求項1又は2に記載の物体識別装置。
【請求項4】
反射物体までの距離を検出するレーダ装置と、
前記電波放射強度画像上における大きさから前記反射物体の投影面積を算出する投影面積算出手段とを備え、
前記認識処理手段は、前記レーダ装置で検出した前記反射物体までの距離と、前記投影面積算出手段で算出した、前記距離における投影面積の大きさから、前記反射物体の種類を判断することを特徴とする請求項1に記載の物体識別装置。
【請求項5】
電波放射強度画像生成手段は、物体から放射される30〜40GHz帯もしくは90〜100GHz帯の電波を検出することを特徴とする請求項1〜4のいずれか一項に記載の物体識別装置。
【請求項1】
物体から放射される電波領域での放射量を検出し、その検出結果に基づいて電波放射強度画像を生成する電波放射強度画像生成手段と、該電波放射強度画像生成手段で生成された電波放射強度画像を時系列的に蓄積するとともに、その蓄積した複数の電波放射強度画像を比較して電波放射強度画像の時系列的な偏差を演算する画像演算手段と、前記電波放射強度画像生成手段で生成した電波放射強度画像と前記画像演算手段で演算した時系列的な偏差情報に基づいて前記物体を認識する認識処理手段とを備え、
前記認識処理手段は、前記電波放射強度画像のうち時系列的な前記偏差が所定値以上大きい部分には反射率の大きい反射物体が存在すると判断し、電波放射強度画像から前記反射物体を除外することにより、反射物体と放射率の大きい放射物体とを識別することを特徴とする物体識別装置。
【請求項2】
前記所定値よりも更に大きい第二所定値が設定され、
前記認識処理手段は、前記電波放射強度画像のうち時系列的な前記偏差が前記第二所定値以上に大きくなる部分には、反射特性の大きい素材で構成された立体物が存在すると判断することを特徴とする請求項1に記載の物体識別装置。
【請求項3】
前記認識処理手段は、反射物体が存在すると判断した領域内では、電波放射量による物体認識を適用しないことを特徴とする請求項1又は2に記載の物体識別装置。
【請求項4】
反射物体までの距離を検出するレーダ装置と、
前記電波放射強度画像上における大きさから前記反射物体の投影面積を算出する投影面積算出手段とを備え、
前記認識処理手段は、前記レーダ装置で検出した前記反射物体までの距離と、前記投影面積算出手段で算出した、前記距離における投影面積の大きさから、前記反射物体の種類を判断することを特徴とする請求項1に記載の物体識別装置。
【請求項5】
電波放射強度画像生成手段は、物体から放射される30〜40GHz帯もしくは90〜100GHz帯の電波を検出することを特徴とする請求項1〜4のいずれか一項に記載の物体識別装置。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2007−333576(P2007−333576A)
【公開日】平成19年12月27日(2007.12.27)
【国際特許分類】
【出願番号】特願2006−166003(P2006−166003)
【出願日】平成18年6月15日(2006.6.15)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成19年12月27日(2007.12.27)
【国際特許分類】
【出願日】平成18年6月15日(2006.6.15)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]