
画像形成装置及びそのプログラム
【課題】プラテンのうねりを考慮してプラテンギャップを適正に調整する。
【解決手段】 インクジェットプリンター20では、印刷ヘッド24の印刷範囲の全域にわたる、プラテン46のうねりに関する情報を、用紙Pに画像を形成する前に不揮発メモリ64に格納している。そして、用紙Pに画像を形成するために印刷ヘッド24の印刷範囲の全域にわたって印刷ヘッド24を走査する際に、不揮発メモリ64に格納されたプラテン46のうねりに関する情報に応じて、プラテンギャップを変更するようヘッド調整機構50を制御する。
【解決手段】 インクジェットプリンター20では、印刷ヘッド24の印刷範囲の全域にわたる、プラテン46のうねりに関する情報を、用紙Pに画像を形成する前に不揮発メモリ64に格納している。そして、用紙Pに画像を形成するために印刷ヘッド24の印刷範囲の全域にわたって印刷ヘッド24を走査する際に、不揮発メモリ64に格納されたプラテン46のうねりに関する情報に応じて、プラテンギャップを変更するようヘッド調整機構50を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、画像形成装置及びそのプログラムに関する。
【背景技術】
【0002】
従来、印刷ヘッドとプラテンとの間に配置されたシートに画像を形成する画像形成装置としては、シート厚に応じて印刷ヘッドとプラテンとの間の距離(プラテンギャップ)を自動調整するプラテンギャップ調整機構を備えたものが知られている(例えば、特許文献1)。この種の画像形成装置では、印刷ヘッドをプラテンに向けて当該印刷ヘッドが当接するまで移動させて、印刷ヘッドとプラテンとの間の距離を測定し、次に、プラテンにシートを供給して、印刷ヘッドをプラテン上のシートに向けて当該印刷ヘッドが当接するまで移動させて、印刷ヘッドとシートとの間の距離を測定し、これら距離の差からシート厚を算出するのが一般的である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−52963号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、こうした画像形成装置では、プラテンにうねりが発生していることがある。特に、大判シートに画像を形成する装置では、プラテンの長さが長いため、印刷ヘッドの印刷範囲全域にわたってうねりが全くないということはむしろ稀である。
【0005】
しかしながら、これまでの画像形成装置では、こうしたプラテンのうねりを考慮してプラテンギャップを自動調整するものは知られていない。
【0006】
本発明は、プラテンのうねりを考慮してプラテンギャップを適正に調整することを主目的とする。
【課題を解決するための手段】
【0007】
本発明は、上述の主目的を達成するために以下の手段を採った。
【0008】
本発明の画像形成装置は、
所定の走査方向に移動しながらインクを吐出するヘッドと、
前記ヘッドの印刷範囲の全域にわたって設けられ、前記ヘッドから吐出されたインクによって画像が形成される印刷媒体を支持するプラテンと、
前記ヘッドの印刷範囲の全域にわたる、前記プラテンのうねりに関する情報を前記印刷媒体に画像を形成する前に格納する記憶手段と、
前記プラテンに対する前記ヘッドの距離を変更する距離変更手段と、
前記印刷媒体に画像を形成するために前記ヘッドの印刷範囲の全域にわたって前記ヘッドを走査する際に、前記記憶手段に格納された前記プラテンのうねりに関する情報に応じて前記距離変更手段を制御する制御手段と、
を備えたものである。
【0009】
この画像形成装置では、ヘッドの印刷範囲の全域にわたる、プラテンのうねりに関する情報を、印刷媒体に画像を形成する前に記憶手段に格納している。そして、印刷媒体に画像を形成するためにヘッドの印刷範囲の全域にわたってヘッドを走査する際に、記憶手段に格納されたプラテンのうねりに関する情報に応じて、プラテンギャップを変更する距離変更手段を制御する。したがって、プラテンのうねりを考慮してプラテンギャップを適正に調整することができる。
【0010】
本発明の画像形成装置において、前記制御手段は、前記ヘッドの印刷範囲の全域にわたって前記ヘッドを走査する際に、前記プラテンに対する前記ヘッドの距離が予め定められた所定距離となるよう前記プラテンのうねりに関する情報に応じて前記距離変更手段を制御してもよい。こうすれば、ヘッドの印刷範囲の全域にわたってヘッドを走査する際、プラテンにうねりが生じていたとしても、プラテンギャップを絶えず一定に保つことができる。
【0011】
本発明の画像形成装置において、前記制御手段は、前記プラテンのうねりに関する情報に応じて前記距離変更手段を制御するにあたり、前記距離変更手段による距離の変更に要する時間を考慮して、前記プラテンのうねりに関する情報を実際の前記ヘッドの位置よりも先の位置に対応する情報を読み出し、該読み出した情報に応じて前記距離変更手段を制御してもよい。こうすれば、距離変更手段を制御する際に、距離変更手段による距離の変更に要する時間に起因する制御遅れが発生することがない。なお、プラテンのうねりに関する情報を画像形成中に逐次取得する場合には、上述した制御遅れの発生を防止することは困難であるが、本発明では、プラテンのうねりに関する情報を予め画像形成前に取得済みのため、上述した制御遅れの発生を防止することが容易に可能となる。
【0012】
本発明の画像形成装置において、前記ヘッドは、該ヘッドの走査範囲の全域にわたって架設されたガイド軸に沿って移動するキャリッジに設けられ、前記距離変更手段は、前記ヘッドを前記プラテンに対して接近・離間させるヘッド調整機構としてもよい。こうすれば、例えばヘッドを搭載したキャリッジを含むガイド軸をプラテンに対して接近・離間させる場合に比べて、ヘッドをプラテンに対して接近・離間させればよいため、距離変更手段の負荷が軽くなる。
【0013】
こうしたヘッド調整機構は、前記ヘッドを支持する支持体を前記プラテンに向かって又は前記プラテンとは逆側に向かって付勢する付勢手段と、カム面により前記付勢手段の付勢に抗して前記支持体を固定する偏心カムと、該偏心カムを回転駆動する駆動手段とを有していてもよい。こうすれば、ヘッド調整機構を簡易な構成とすることができる。なお、偏心カムは、多段階にプラテンギャップを調整できるようにカム面を多角柱の側面としてもよいし、あるいは、無段階にプラテンギャップを調整できるようにカム面を曲面(例えば円柱の側面とか楕円柱の側面)としてもよい。また、駆動手段は、ムービングコイル方式のモーターとしてもよい。
【0014】
本発明のプログラムは、1又は複数のコンピュータを、上述した画像形成装置の記憶手段及び制御手段として機能させるためのものである。このプログラムは、コンピュータが読み取り可能な記録媒体(例えばハードディスク、ROM、FD、CD、DVDなど)に記録されていてもよいし、伝送媒体(インターネットやLANなどの通信網)を介してあるコンピュータから別のコンピュータへ配信されてもよいし、その他どのような形で授受されてもよい。このプログラムを一つのコンピュータに実行させるか又は複数のコンピュータに分担して実行させれば、本発明の画像形成装置と同様の効果を得ることができる。
【図面の簡単な説明】
【0015】
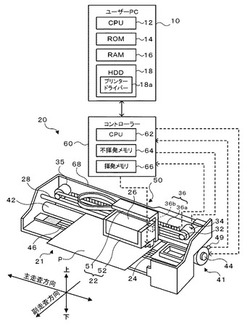
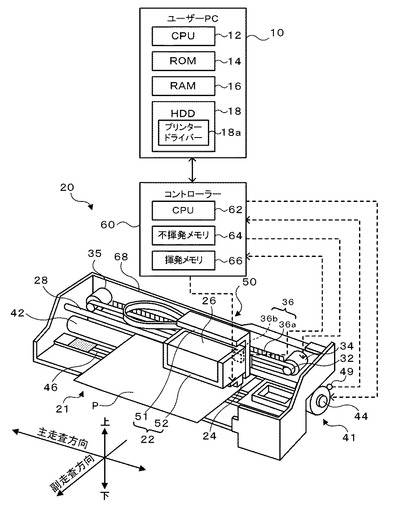
【図1】本実施形態のインクジェットプリンター20の構成の概略を示す構成図。
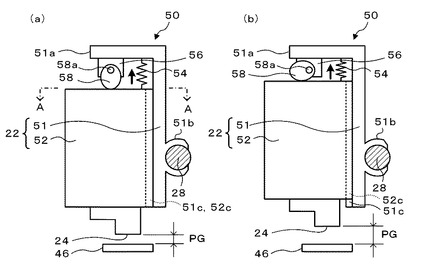
【図2】ヘッド調整機構50の側面図。
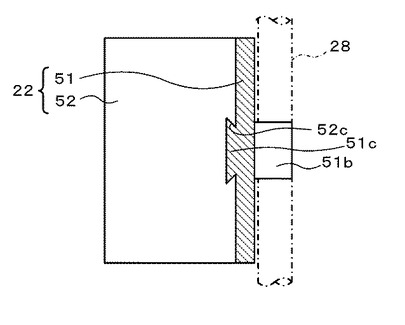
【図3】図2(a)のA−A断面図。
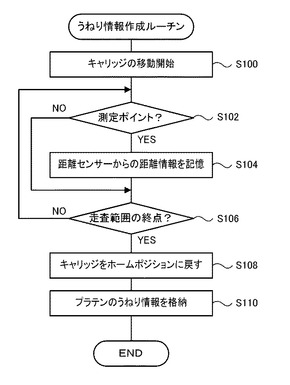
【図4】うねり情報作成ルーチンの一例を示すフローチャート。
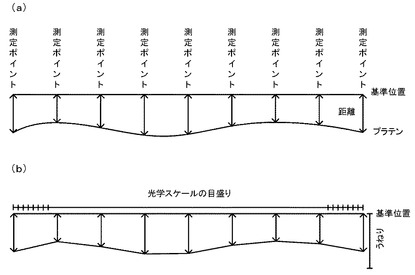
【図5】うねりに関する情報を作成する手順を示す説明図。
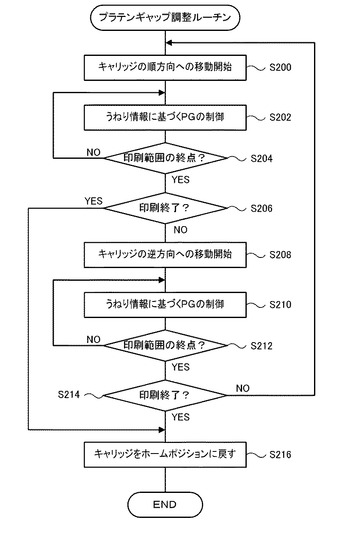
【図6】プラテンギャップ調整ルーチンの一例を示すフローチャート。
【図7】印刷ヘッド24がプラテン46のうねりに追従する様子を示す説明図。
【図8】ヘッド調整機構150の側面図。
【発明を実施するための形態】
【0016】
次に、本発明の実施の形態を図面に基づいて説明する。図1はインクジェットプリンター20の概略を示す構成図、図2はヘッド調整機構50の側面図であり、(a)はプラテンギャップPGが狭いとき、(b)はプラテンギャップPGが広いときを示す。図3は図2(a)のA−A断面図である。
【0017】
インクジェットプリンター20は、プラテン46上に搬送された用紙Pに対して主走査方向(図1で左右の方向)の移動を伴って印刷ヘッド24に形成されたノズルからインク滴を吐出して印刷を行なうプリンター機構21と、用紙Pを副走査方向(図1で奥から手前の方向)に搬送する紙送り機構41と、プラテン46に対する印刷ヘッド24の距離(プラテンギャップPG)を調整するヘッド調整機構50と、装置全体をコントロールするコントローラー60と、を備える。
【0018】
プリンター機構21は、ガイド軸28によりガイドされながら主走査方向に往復動可能なキャリッジ22と、ガイド軸28の一端側と他端側にそれぞれ設置されたキャリッジモーター34および従動ローラー35と、キャリッジモーター34と従動ローラー35とに掛け渡されると共にキャリッジ22に取り付けられたキャリッジベルト32と、キャリッジ22に搭載され溶媒としての水に顔料粒子を分散させたシアン(C),マゼンタ(M),イエロー(Y),ブラック(K)の各色のインクを貯留し各色毎に独立して交換が可能なインクカートリッジ26と、インクカートリッジ26からそれぞれ供給された各インクに加圧してインク滴を吐出する複数のノズルが形成された印刷ヘッド24と、を備える。キャリッジ22は、キャリッジモーター34によりキャリッジベルト32を駆動することにより、主走査方向に往復動されるようになっている。キャリッジ22の背面側には、キャリッジ22の主走査方向における位置を検出するキャリッジポジションセンサー36が取り付けられている。このキャリッジポジションセンサー36は、フレーム68にガイド軸28に沿って配置されたリニア式の光学スケール36aと、光学スケール36aに対向するようキャリッジ22の背面に取り付けられ光学スケール36aを光学的に読み取る光学センサー36bとにより構成されている。プラテン46は、使用可能な最大の用紙Pの副走査方向の幅に相当する印刷範囲の全域にわたって設けられている。このプラテン46には、多数の穴が設けられ、その穴から空気を吸引するようになっている。このため、用紙Pは負圧によりプラテン46に吸着される。なお、印刷範囲は、印刷ヘッド24が走査可能な範囲(走査範囲)を超えることはない。
【0019】
紙送り機構41は、用紙Pをプラテン46上に搬送させる搬送ローラー42と、搬送ローラー42を回転駆動する搬送モーター44と、を備える。搬送モーター44は、その回転軸に回転量を検出するロータリーエンコーダー49が取り付けられており、ロータリーエンコーダー49からの回転量に基づいて駆動制御されている。なお、ロータリーエンコーダー49は、図示しないが、所定回転角間隔で目盛りが付されたロータリースケールと、ロータリースケールの目盛りを読み取るためのロータリースケールセンサーとにより構成されている。
【0020】
ヘッド調整機構50は、図2に示すように、キャリッジ22を構成するメインキャリッジ51及びサブキャリッジ52と、メインキャリッジ51のヒサシ部51aの裏面とサブキャリッジ52の上面との間に設けられたコイルバネ54と、メインキャリッジ51のヒサシ部51aの裏面に取り付けられたカム駆動モーター56と、そのカム駆動モーター56の回転軸によって回転駆動されるカム軸58aを有する偏心カム58と、を備える。メインキャリッジ51は、逆L字型の部材であり、背面にガイド軸28が挿通するガイド軸挿通部51bを有している。このメインキャリッジ51は、キャリッジベルト32(図1参照)と一体化されており、ガイド軸28に沿って主走査方向に移動可能である一方、上下方向には移動不能となっている。サブキャリッジ52は、インクカートリッジ26(図1参照)と印刷ヘッド24とを備え、メインキャリッジ51に対して上下動可能となっている。具体的には、図3に示すように、サブキャリッジ52の背面には上下に延びるレール溝52cが形成され、メインキャリッジ51のうちサブキャリッジ52の背面と接する面にはそのレール溝52cに嵌め込まれたレール51cが形成されている。レール溝52cの断面は台形(溝底の幅の方が溝開口の幅よりも広い形状)であり、レール51cの断面もレール溝52cに嵌り込むように台形となっている。このため、サブキャリッジ52はメインキャリッジ51に対して上下方向には移動可能だが、上下方向に直交する方向(前後方向)には移動不能である。コイルバネ54は、一端がメインキャリッジ51のヒサシ部51aの裏面に固定され、他端がサブキャリッジ52の上面に固定されている。カム駆動モーター56は、ムービングコイル方式のモーターであり、メインキャリッジ51のヒサシ部51aの裏面に固定されている。このカム駆動モーター56の回転軸は、楕円形形状の偏心カム58のカム軸58aと一体化されている。偏心カム58のカム面は、楕円形の側面であり、サブキャリッジ52の上面と接触している。コイルバネ54は、メインキャリッジ51のヒサシ部51aの裏面に対してサブキャリッジ52の上面が接近する方向に付勢している(印刷ヘッド24をプラテン46とは逆側に向かって付勢している)が、サブキャリッジ52の上面は、偏心カム58のカム面によりコイルバネ54の付勢に抗して上下位置が固定されている。このため、偏心カム58を回転させることにより、カム軸58aとサブキャリッジ52の上面との距離が無段階に変化し、その結果、サブキャリッジ52に取り付けられている印刷ヘッド24とプラテン46との距離つまりプラテンギャップPGが無段階に変化する。
【0021】
コントローラー60は、CPU62を中心とするマイクロプロセッサーとして構成されており、各種のプログラムを実行したりデータを記憶したりする機能を有する。また、コントローラー60は、電源オフ後も記憶内容を保持する不揮発メモリ64や電源オフ後は記憶内容が消失する揮発メモリ66を有している。このコントローラー60には、キャリッジポジションセンサー36からのキャリッジ22の位置や、ロータリーエンコーダー49からの搬送ローラー42の回転量が入力され、コントローラー60からは印刷ヘッド24への駆動信号や搬送モーター44への駆動信号,キャリッジモーター34への駆動信号,カム駆動モーター56(図2参照)への駆動信号などが出力される。また、コントローラー60は、ユーザーPC10からの印刷ジョブを受け付けて、その印刷ジョブに含まれる印刷データに基づいて用紙Pに画像を形成する。具体的には、キャリッジ22を主走査方向に沿って印刷領域の一端から他端まで移動させながら印刷ヘッド24のノズルからインクを用紙Pへ吐出させ、その後紙送り機構41により用紙Pを副走査方向に所定量紙送りするという一連の動作を繰り返すことにより、用紙Pに画像を形成する。
【0022】
ユーザーPC10は、インクジェットプリンター20とデータのやり取りが可能に接続され、CPU12を中心とするマイクロプロセッサーとして構成されており、処理プログラムを記憶したROM14と、一時的にデータを記憶するRAM16と、インクジェットプリンター20のプリンタードライバー18aなどがインストールされたHDD18と、を備える。プリンタードライバー18aは、HDD18などに記憶されたRGBデータからなる画像データを入力してCMYKデータに変換し、そのCMYKデータの階調値を表現するためにインクドットを分散して形成するハーフトーン処理を実行し、ハーフトーン処理されたデータをインクジェットプリンター20に転送すべきデータ順に並べ替え、印刷データをインクジェットプリンター20へ転送する。
【0023】
次に、こうして構成されたインクジェットプリンター20の動作について説明する。
【0024】
このインクジェットプリンター20では、画像を形成する前(ここではプリンター組み立て時)に、コントローラー60のCPU62が図4に示すうねり情報作成ルーチンを実行することにより、印刷ヘッド24の印刷範囲の全域にわたるプラテン46のうねりに関する情報が作成され内部の不揮発メモリ64に格納される。具体的には、プリンター組み立て時において、キャリッジ22のプラテン46と対向する位置に反射型の距離センサーを着脱可能に取り付け、その状態でうねり情報作成ルーチンを実行する。距離センサーは、センサー自身からプラテン46の表面までの距離を測定するものであり、コントローラー60に測定情報を出力可能に取り付けられている。この距離センサーは、メインキャリッジ51との位置関係が予め決められている。なお、距離センサーは、このルーチンの終了後にキャリッジ22から取り外される。
【0025】
オペレーターがインクジェットプリンター20の図示しない操作パネルを操作してうねり情報作成ルーチンの開始を指令すると、コントローラー60のCPU62は、このルーチンを開始する。うねり情報作成ルーチンが開始されると、CPU62は、まず、印刷範囲の一端(図1の右端)に位置するキャリッジ22の主走査方向への移動を開始させる(ステップS100)。具体的には、キャリッジモーター34によりキャリッジベルト32を駆動することにより、キャリッジ22を印刷範囲の一端から他端(図1の左端)までの移動を開始させる。続いて、CPU62は、キャリッジポジションセンサー36からのキャリッジ22の位置に基づいて、キャリッジ22が測定ポイントに到達したか否かを判定する(ステップS102)。測定ポイントは、光学スケール36aの分解能と印刷ヘッド24の印刷範囲の全長とを考慮して適宜設定されている。本実施形態では、印刷範囲の全長を8等分した各等分点と印刷範囲の始点及び終点の合計9箇所が測定ポイントとして設定されているものとする。キャリッジ22が測定ポイントに到達していたならば、CPU62は距離センサーからの距離情報を取得し、これを今回の測定ポイントと対応づけて内部の揮発メモリ66に記憶する(ステップS104)。ステップS104の後又はステップS102で測定ポイントに到達してなかった場合には、キャリッジ22が印刷範囲の他端つまり終点に到達したか否かを判定し(ステップS106)、終点に到達していなければ、再びステップS102に戻る。これにより、キャリッジ22が印刷範囲の一端から他端まで移動する期間中、測定ポイントに到達する毎に測定ポイントに対応する形式で距離情報が記憶される。一方、ステップS106でキャリッジ22が印刷範囲の他端つまり終点に到達していたならば、キャリッジ22をホームポジションに戻し(ステップS108)、プラテン46のうねりに関する情報を作成してこれを不揮発メモリ64に格納し(ステップS110)、本ルーチンを終了する。うねりに関する情報は、次のようにして作成する。まず、距離センサーから得られる距離は、プラテン46と距離センサーとの距離を表すから、距離センサーの取付位置を基準位置とし、得られた距離を基準位置からプラテン46までの距離として取り扱う。このときの一例を図5(a)に示す。次に、隣接する2つの測定ポイントの間の基準位置からプラテン46までの距離を、両測定ポイントにおける距離を表す点を直線で結ぶことにより補完する。このようにして、光学スケール36aの目盛りに対する、基準位置からプラテン46までの距離(うねり)を求め、それをうねりに関する情報として不揮発メモリ64に格納する。うねりに関する情報の一例を図5(b)に示す。
【0026】
次に、コントローラー60のCPU62により実行されるプラテンギャップ調整ルーチンについて説明する。図6は、このルーチンの一例を示すフローチャートである。このルーチンは、ユーザーPC10のプリンタードライバー18aから印刷ジョブを受け取り、その印刷ジョブに基づいて用紙Pに画像を形成する画像形成ルーチンと並行して実行される。なお、画像形成ルーチンでは、CPU62は、キャリッジ22を主走査方向に沿って走査領域の一端から他端まで移動させながら印刷ヘッド24のノズルからインクを用紙Pへ吐出させ、その後紙送り機構41により用紙Pを所定量紙送りするという一連の動作を繰り返すことにより、用紙Pに画像を形成する。
【0027】
さて、プラテンギャップ調整ルーチンが開始されると、CPU62は、キャリッジ22の順方向への移動を開始させる(ステップS200)。順方向とは、図1において主走査方向のうち右から左に向かう方向をいう。そして、キャリッジ22の移動中、うねりに関する情報に基づくプラテンギャップPGの制御を実行する(ステップS202)。具体的には、用紙Pの厚みなどを考慮して予めプラテンギャップPGが所定距離dに設定されているとする。CPU62は、キャリッジポジションセンサー36からのキャリッジ22の位置が変化する毎に、そのキャリッジ22の位置に対応するうねりを読み出し、プラテン46から印刷ヘッド24までの距離が絶えず所定距離dとなるようにヘッド調整機構50のカム駆動モーター56を駆動して、プラテンギャップPGを調整する。光学スケール36aの目盛りに対するうねりが図5(b)であるとすると、印刷ヘッド24は図7に示すように印刷ヘッド24の印刷範囲において、印刷ヘッド24がプラテン46のうねりに追従して上下動する。これにより、プラテンギャップPGは絶えず所定距離dとなる。
【0028】
続いて、CPU62は、キャリッジ22が印刷範囲の終点に到達したか否かを判定し(ステップS204)、終点に到達していなければ再びステップS202に戻る。一方、終点に到達したならば、印刷が終了したか否か、つまり印刷ジョブに基づく用紙Pへの画像形成が終了したか否かを判定する(ステップS206)。印刷が終了していなければ、CPU62は、キャリッジ22の逆方向への移動を開始させる(ステップS208)。逆方向とは、図1において主走査方向のうち左から右に向かう方向をいう。そして、キャリッジ22の移動中、うねりに関する情報に基づくプラテンギャップPGの制御を実行する(ステップS210)。この点は上述したステップS202と同様である。続いて、CPU62は、キャリッジ22が印刷範囲の終点に到達したか否かを判定し(ステップS212)、終点に到達していなければ再びステップS210に戻る。一方、終点に到達したならば、印刷が終了したか否か、つまり印刷ジョブに基づく用紙Pへの画像形成が終了したか否かを判定する(ステップS214)。そして、印刷が終了していなければ、ステップS200に戻る。一方、ステップS206又はS214で印刷が終了していたならば、キャリッジ22をホームポジションに戻し(ステップS216)、本ルーチンを終了する。
【0029】
ここで、本実施形態の構成要素と本発明の構成要素との対応関係を明らかにする。本実施形態のインクジェットプリンター20が本発明の画像形成装置に相当し、印刷ヘッド24がヘッドに相当し、プラテン46がプラテンに相当し、コントローラー60の不揮発メモリ64が記憶手段に相当し、ヘッド調整機構50が距離変更手段に相当し、コントローラー60のCPU62が制御手段に相当する。また、コイルバネ54が付勢手段に相当し、偏心カム58が偏心カムに相当し、カム駆動モーター56が駆動手段に相当し、サブキャリッジ52がヘッドの支持体に相当する。
【0030】
以上説明した本実施形態によれば、印刷ヘッド24の印刷範囲の全域にわたる、プラテン46のうねりに関する情報を、用紙Pに画像を形成する前に不揮発メモリ64に格納している。そして、用紙Pに画像を形成するために印刷ヘッド24の印刷範囲の全域にわたって印刷ヘッド24を走査する際に、不揮発メモリ64に格納されたプラテン46のうねりに関する情報に応じて、プラテンギャップPGを変更するようヘッド調整機構50を制御する。したがって、プラテン46のうねりを考慮してプラテンギャップPGを適正に調整することができる。
【0031】
また、CPU62は、印刷ヘッド24の印刷範囲の全域にわたって印刷ヘッド24を走査する際に、プラテンギャップPGが予め定められた所定距離dとなるように、プラテン46のうねりに関する情報に応じてヘッド調整機構50を制御する。このため、印刷ヘッド24の印刷範囲の全域にわたって印刷ヘッド24を走査する際、プラテン46にうねりが生じていたとしても、プラテンギャップPGを絶えず一定に保つことができる。
【0032】
更に、印刷ヘッド24は、この印刷ヘッド24の走査範囲の全域にわたって架設されたガイド軸28に沿って移動するキャリッジ22に設けられ、ヘッド調整機構50は、印刷ヘッド24をプラテン46に対して接近・離間させるものである。このため、例えば印刷ヘッド24を搭載したキャリッジ22を含むガイド軸28をプラテン46に対して接近・離間させる場合に比べて、印刷ヘッド24をプラテン46に対して接近・離間させればよいため、プラテンギャップPGを変更するための負荷が軽くなる。
【0033】
更にまた、ヘッド調整機構50として、上述したようにメイン及びサブキャリッジ51,52と、コイルバネ54と、偏心カム58と、カム駆動モーター56とを有する機構を採用したため、構成が簡易である。
【0034】
なお、本発明は上述した実施形態に何ら限定されることはなく、本発明の技術的範囲に属する限り種々の態様で実施し得ることはいうまでもない。
【0035】
例えば、上述した実施形態では、うねり情報作成ルーチンにおいて基準位置からプラテン46までの距離を測定する測定ポイントの数を9箇所としたが、測定ポイントの数をこれより少なくしてもよいし、多くしてもよい。プラテン46のうねりを考慮してプラテンギャップPGを適正に調整するにあたり、測定ポイントの数が多いほど調整の精度が向上するため好ましい。例えば、光学スケール36aの分解能と印刷ヘッド24の印刷範囲の全長とを考慮して、測定ポイントの数が最大となるようにしてもよい。
【0036】
上述した実施形態において、プラテンギャップ調整ルーチンでうねり情報に基づいてプラテンギャップPGを制御するにあたり、ヘッド調整機構50によるプラテン46と印刷ヘッド24との距離の変更に要する時間を考慮して、プラテン46のうねりに関する情報のうち実際の印刷ヘッド24の位置よりも先の位置に対応する情報を読み出し、該読み出した情報に応じてヘッド調整機構50を制御してもよい。こうすれば、ヘッド調整機構50を制御する際に、ヘッド調整機構50によるプラテン46と印刷ヘッド24との距離の変更に要する時間に起因する制御遅れが発生することがない。
【0037】
上述した実施形態では、偏心カム58は、無段階にプラテンギャップPGを調整できるようにカム面を曲面(円柱の側面とか楕円柱の側面)としたが、多段階にプラテンギャップPGを調整できるようにカム面を多角柱の側面としてもよい。
【0038】
上述した実施形態では、ヘッド調整機構50のコイルバネ54は印刷ヘッド24が搭載されたサブキャリッジ52をプラテン46とは逆側に向かって付勢するものとしたが、サブキャリッジ52をプラテン46に向かって付勢するコイルバネを採用してもよい。例えば、図8に示すヘッド調整機構150は、コイルバネ154と、偏心カム158と、カム駆動モーター156とを備えている。コイルバネ154は、サブキャリッジ52の上面とメインキャリッジ51のヒサシ部51aとの間に設けられ、サブキャリッジ52をプラテン46に向かって付勢している。偏心カム158は、メインキャリッジ52のヒサシ部52aとメインキャリッジ51のヒサシ部51aとの間に設けられ、ヒサシ部51aの上面にカム面が接触し、コイルバネ154の付勢に抗して印刷ヘッド24を備えたサブキャリッジ52を固定する役割を果たす。カム駆動モーター156は、ヒサシ部52aの裏面に固定され、偏心カム158のカム軸158aを回転駆動する役割を果たす。このヘッド調整機構150も、偏心カム158のカム軸158aを回転させることにより、プラテンギャップPGを調整することができる。図8の実線はプラテンギャップPGが狭いときを示し、一点鎖線はプラテンギャップPGが広いときを示す。なお、カム駆動モーター156をヒサシ部51aの上面に固定し、カム面158aをヒサシ部52aの裏面に接触するように構成してもよい。
【0039】
上述した実施形態では、距離センサーをうねり情報作成ルーチンの終了後にキャリッジ22から取り外すものとしたが、うねり情報作成ルーチンの終了後もキャリッジ22に取り付けたままとしてもよい。
【0040】
上述した実施形態では、ヘッド調整機構50として、印刷ヘッド24を搭載したサブキャリッジ52をプラテン46に対して接近・離間させる機構を採用したが、印刷ヘッド24を搭載したキャリッジ22を含むガイド軸28ごと、プラテン46に対して接近・離間させる機構を採用してもよい。
【符号の説明】
【0041】
10 ユーザーPC、12 CPU、14 ROM、16 RAM、18 HDD、18a プリンタードライバー、20 インクジェットプリンター、21 プリンター機構、22 キャリッジ、24 印刷ヘッド、26 インクカートリッジ、28 ガイド軸、32 キャリッジベルト、34 キャリッジモーター、35 従動ローラー、36 キャリッジポジションセンサー、36a 光学スケール、36b 光学センサー、41 紙送り機構、42 搬送ローラー、44 搬送モーター、46 プラテン、49 ロータリーエンコーダー、50 ヘッド調整機構、51 メインキャリッジ、51a ヒサシ部、51b ガイド軸挿通部、51c レール、52 サブキャリッジ、52a ヒサシ部、52c レール溝、54 コイルバネ、56 カム駆動モーター、58 偏心カム、58a カム軸、60 コントローラー、62 CPU、64 不揮発メモリ、66 揮発メモリ、68 フレーム、150 ヘッド調整機構、154 コイルバネ、156 カム駆動モーター、158 偏心カム、158a カム軸、d 所定距離、P 用紙、PG プラテンギャップ
【技術分野】
【0001】
本発明は、画像形成装置及びそのプログラムに関する。
【背景技術】
【0002】
従来、印刷ヘッドとプラテンとの間に配置されたシートに画像を形成する画像形成装置としては、シート厚に応じて印刷ヘッドとプラテンとの間の距離(プラテンギャップ)を自動調整するプラテンギャップ調整機構を備えたものが知られている(例えば、特許文献1)。この種の画像形成装置では、印刷ヘッドをプラテンに向けて当該印刷ヘッドが当接するまで移動させて、印刷ヘッドとプラテンとの間の距離を測定し、次に、プラテンにシートを供給して、印刷ヘッドをプラテン上のシートに向けて当該印刷ヘッドが当接するまで移動させて、印刷ヘッドとシートとの間の距離を測定し、これら距離の差からシート厚を算出するのが一般的である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−52963号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、こうした画像形成装置では、プラテンにうねりが発生していることがある。特に、大判シートに画像を形成する装置では、プラテンの長さが長いため、印刷ヘッドの印刷範囲全域にわたってうねりが全くないということはむしろ稀である。
【0005】
しかしながら、これまでの画像形成装置では、こうしたプラテンのうねりを考慮してプラテンギャップを自動調整するものは知られていない。
【0006】
本発明は、プラテンのうねりを考慮してプラテンギャップを適正に調整することを主目的とする。
【課題を解決するための手段】
【0007】
本発明は、上述の主目的を達成するために以下の手段を採った。
【0008】
本発明の画像形成装置は、
所定の走査方向に移動しながらインクを吐出するヘッドと、
前記ヘッドの印刷範囲の全域にわたって設けられ、前記ヘッドから吐出されたインクによって画像が形成される印刷媒体を支持するプラテンと、
前記ヘッドの印刷範囲の全域にわたる、前記プラテンのうねりに関する情報を前記印刷媒体に画像を形成する前に格納する記憶手段と、
前記プラテンに対する前記ヘッドの距離を変更する距離変更手段と、
前記印刷媒体に画像を形成するために前記ヘッドの印刷範囲の全域にわたって前記ヘッドを走査する際に、前記記憶手段に格納された前記プラテンのうねりに関する情報に応じて前記距離変更手段を制御する制御手段と、
を備えたものである。
【0009】
この画像形成装置では、ヘッドの印刷範囲の全域にわたる、プラテンのうねりに関する情報を、印刷媒体に画像を形成する前に記憶手段に格納している。そして、印刷媒体に画像を形成するためにヘッドの印刷範囲の全域にわたってヘッドを走査する際に、記憶手段に格納されたプラテンのうねりに関する情報に応じて、プラテンギャップを変更する距離変更手段を制御する。したがって、プラテンのうねりを考慮してプラテンギャップを適正に調整することができる。
【0010】
本発明の画像形成装置において、前記制御手段は、前記ヘッドの印刷範囲の全域にわたって前記ヘッドを走査する際に、前記プラテンに対する前記ヘッドの距離が予め定められた所定距離となるよう前記プラテンのうねりに関する情報に応じて前記距離変更手段を制御してもよい。こうすれば、ヘッドの印刷範囲の全域にわたってヘッドを走査する際、プラテンにうねりが生じていたとしても、プラテンギャップを絶えず一定に保つことができる。
【0011】
本発明の画像形成装置において、前記制御手段は、前記プラテンのうねりに関する情報に応じて前記距離変更手段を制御するにあたり、前記距離変更手段による距離の変更に要する時間を考慮して、前記プラテンのうねりに関する情報を実際の前記ヘッドの位置よりも先の位置に対応する情報を読み出し、該読み出した情報に応じて前記距離変更手段を制御してもよい。こうすれば、距離変更手段を制御する際に、距離変更手段による距離の変更に要する時間に起因する制御遅れが発生することがない。なお、プラテンのうねりに関する情報を画像形成中に逐次取得する場合には、上述した制御遅れの発生を防止することは困難であるが、本発明では、プラテンのうねりに関する情報を予め画像形成前に取得済みのため、上述した制御遅れの発生を防止することが容易に可能となる。
【0012】
本発明の画像形成装置において、前記ヘッドは、該ヘッドの走査範囲の全域にわたって架設されたガイド軸に沿って移動するキャリッジに設けられ、前記距離変更手段は、前記ヘッドを前記プラテンに対して接近・離間させるヘッド調整機構としてもよい。こうすれば、例えばヘッドを搭載したキャリッジを含むガイド軸をプラテンに対して接近・離間させる場合に比べて、ヘッドをプラテンに対して接近・離間させればよいため、距離変更手段の負荷が軽くなる。
【0013】
こうしたヘッド調整機構は、前記ヘッドを支持する支持体を前記プラテンに向かって又は前記プラテンとは逆側に向かって付勢する付勢手段と、カム面により前記付勢手段の付勢に抗して前記支持体を固定する偏心カムと、該偏心カムを回転駆動する駆動手段とを有していてもよい。こうすれば、ヘッド調整機構を簡易な構成とすることができる。なお、偏心カムは、多段階にプラテンギャップを調整できるようにカム面を多角柱の側面としてもよいし、あるいは、無段階にプラテンギャップを調整できるようにカム面を曲面(例えば円柱の側面とか楕円柱の側面)としてもよい。また、駆動手段は、ムービングコイル方式のモーターとしてもよい。
【0014】
本発明のプログラムは、1又は複数のコンピュータを、上述した画像形成装置の記憶手段及び制御手段として機能させるためのものである。このプログラムは、コンピュータが読み取り可能な記録媒体(例えばハードディスク、ROM、FD、CD、DVDなど)に記録されていてもよいし、伝送媒体(インターネットやLANなどの通信網)を介してあるコンピュータから別のコンピュータへ配信されてもよいし、その他どのような形で授受されてもよい。このプログラムを一つのコンピュータに実行させるか又は複数のコンピュータに分担して実行させれば、本発明の画像形成装置と同様の効果を得ることができる。
【図面の簡単な説明】
【0015】
【図1】本実施形態のインクジェットプリンター20の構成の概略を示す構成図。
【図2】ヘッド調整機構50の側面図。
【図3】図2(a)のA−A断面図。
【図4】うねり情報作成ルーチンの一例を示すフローチャート。
【図5】うねりに関する情報を作成する手順を示す説明図。
【図6】プラテンギャップ調整ルーチンの一例を示すフローチャート。
【図7】印刷ヘッド24がプラテン46のうねりに追従する様子を示す説明図。
【図8】ヘッド調整機構150の側面図。
【発明を実施するための形態】
【0016】
次に、本発明の実施の形態を図面に基づいて説明する。図1はインクジェットプリンター20の概略を示す構成図、図2はヘッド調整機構50の側面図であり、(a)はプラテンギャップPGが狭いとき、(b)はプラテンギャップPGが広いときを示す。図3は図2(a)のA−A断面図である。
【0017】
インクジェットプリンター20は、プラテン46上に搬送された用紙Pに対して主走査方向(図1で左右の方向)の移動を伴って印刷ヘッド24に形成されたノズルからインク滴を吐出して印刷を行なうプリンター機構21と、用紙Pを副走査方向(図1で奥から手前の方向)に搬送する紙送り機構41と、プラテン46に対する印刷ヘッド24の距離(プラテンギャップPG)を調整するヘッド調整機構50と、装置全体をコントロールするコントローラー60と、を備える。
【0018】
プリンター機構21は、ガイド軸28によりガイドされながら主走査方向に往復動可能なキャリッジ22と、ガイド軸28の一端側と他端側にそれぞれ設置されたキャリッジモーター34および従動ローラー35と、キャリッジモーター34と従動ローラー35とに掛け渡されると共にキャリッジ22に取り付けられたキャリッジベルト32と、キャリッジ22に搭載され溶媒としての水に顔料粒子を分散させたシアン(C),マゼンタ(M),イエロー(Y),ブラック(K)の各色のインクを貯留し各色毎に独立して交換が可能なインクカートリッジ26と、インクカートリッジ26からそれぞれ供給された各インクに加圧してインク滴を吐出する複数のノズルが形成された印刷ヘッド24と、を備える。キャリッジ22は、キャリッジモーター34によりキャリッジベルト32を駆動することにより、主走査方向に往復動されるようになっている。キャリッジ22の背面側には、キャリッジ22の主走査方向における位置を検出するキャリッジポジションセンサー36が取り付けられている。このキャリッジポジションセンサー36は、フレーム68にガイド軸28に沿って配置されたリニア式の光学スケール36aと、光学スケール36aに対向するようキャリッジ22の背面に取り付けられ光学スケール36aを光学的に読み取る光学センサー36bとにより構成されている。プラテン46は、使用可能な最大の用紙Pの副走査方向の幅に相当する印刷範囲の全域にわたって設けられている。このプラテン46には、多数の穴が設けられ、その穴から空気を吸引するようになっている。このため、用紙Pは負圧によりプラテン46に吸着される。なお、印刷範囲は、印刷ヘッド24が走査可能な範囲(走査範囲)を超えることはない。
【0019】
紙送り機構41は、用紙Pをプラテン46上に搬送させる搬送ローラー42と、搬送ローラー42を回転駆動する搬送モーター44と、を備える。搬送モーター44は、その回転軸に回転量を検出するロータリーエンコーダー49が取り付けられており、ロータリーエンコーダー49からの回転量に基づいて駆動制御されている。なお、ロータリーエンコーダー49は、図示しないが、所定回転角間隔で目盛りが付されたロータリースケールと、ロータリースケールの目盛りを読み取るためのロータリースケールセンサーとにより構成されている。
【0020】
ヘッド調整機構50は、図2に示すように、キャリッジ22を構成するメインキャリッジ51及びサブキャリッジ52と、メインキャリッジ51のヒサシ部51aの裏面とサブキャリッジ52の上面との間に設けられたコイルバネ54と、メインキャリッジ51のヒサシ部51aの裏面に取り付けられたカム駆動モーター56と、そのカム駆動モーター56の回転軸によって回転駆動されるカム軸58aを有する偏心カム58と、を備える。メインキャリッジ51は、逆L字型の部材であり、背面にガイド軸28が挿通するガイド軸挿通部51bを有している。このメインキャリッジ51は、キャリッジベルト32(図1参照)と一体化されており、ガイド軸28に沿って主走査方向に移動可能である一方、上下方向には移動不能となっている。サブキャリッジ52は、インクカートリッジ26(図1参照)と印刷ヘッド24とを備え、メインキャリッジ51に対して上下動可能となっている。具体的には、図3に示すように、サブキャリッジ52の背面には上下に延びるレール溝52cが形成され、メインキャリッジ51のうちサブキャリッジ52の背面と接する面にはそのレール溝52cに嵌め込まれたレール51cが形成されている。レール溝52cの断面は台形(溝底の幅の方が溝開口の幅よりも広い形状)であり、レール51cの断面もレール溝52cに嵌り込むように台形となっている。このため、サブキャリッジ52はメインキャリッジ51に対して上下方向には移動可能だが、上下方向に直交する方向(前後方向)には移動不能である。コイルバネ54は、一端がメインキャリッジ51のヒサシ部51aの裏面に固定され、他端がサブキャリッジ52の上面に固定されている。カム駆動モーター56は、ムービングコイル方式のモーターであり、メインキャリッジ51のヒサシ部51aの裏面に固定されている。このカム駆動モーター56の回転軸は、楕円形形状の偏心カム58のカム軸58aと一体化されている。偏心カム58のカム面は、楕円形の側面であり、サブキャリッジ52の上面と接触している。コイルバネ54は、メインキャリッジ51のヒサシ部51aの裏面に対してサブキャリッジ52の上面が接近する方向に付勢している(印刷ヘッド24をプラテン46とは逆側に向かって付勢している)が、サブキャリッジ52の上面は、偏心カム58のカム面によりコイルバネ54の付勢に抗して上下位置が固定されている。このため、偏心カム58を回転させることにより、カム軸58aとサブキャリッジ52の上面との距離が無段階に変化し、その結果、サブキャリッジ52に取り付けられている印刷ヘッド24とプラテン46との距離つまりプラテンギャップPGが無段階に変化する。
【0021】
コントローラー60は、CPU62を中心とするマイクロプロセッサーとして構成されており、各種のプログラムを実行したりデータを記憶したりする機能を有する。また、コントローラー60は、電源オフ後も記憶内容を保持する不揮発メモリ64や電源オフ後は記憶内容が消失する揮発メモリ66を有している。このコントローラー60には、キャリッジポジションセンサー36からのキャリッジ22の位置や、ロータリーエンコーダー49からの搬送ローラー42の回転量が入力され、コントローラー60からは印刷ヘッド24への駆動信号や搬送モーター44への駆動信号,キャリッジモーター34への駆動信号,カム駆動モーター56(図2参照)への駆動信号などが出力される。また、コントローラー60は、ユーザーPC10からの印刷ジョブを受け付けて、その印刷ジョブに含まれる印刷データに基づいて用紙Pに画像を形成する。具体的には、キャリッジ22を主走査方向に沿って印刷領域の一端から他端まで移動させながら印刷ヘッド24のノズルからインクを用紙Pへ吐出させ、その後紙送り機構41により用紙Pを副走査方向に所定量紙送りするという一連の動作を繰り返すことにより、用紙Pに画像を形成する。
【0022】
ユーザーPC10は、インクジェットプリンター20とデータのやり取りが可能に接続され、CPU12を中心とするマイクロプロセッサーとして構成されており、処理プログラムを記憶したROM14と、一時的にデータを記憶するRAM16と、インクジェットプリンター20のプリンタードライバー18aなどがインストールされたHDD18と、を備える。プリンタードライバー18aは、HDD18などに記憶されたRGBデータからなる画像データを入力してCMYKデータに変換し、そのCMYKデータの階調値を表現するためにインクドットを分散して形成するハーフトーン処理を実行し、ハーフトーン処理されたデータをインクジェットプリンター20に転送すべきデータ順に並べ替え、印刷データをインクジェットプリンター20へ転送する。
【0023】
次に、こうして構成されたインクジェットプリンター20の動作について説明する。
【0024】
このインクジェットプリンター20では、画像を形成する前(ここではプリンター組み立て時)に、コントローラー60のCPU62が図4に示すうねり情報作成ルーチンを実行することにより、印刷ヘッド24の印刷範囲の全域にわたるプラテン46のうねりに関する情報が作成され内部の不揮発メモリ64に格納される。具体的には、プリンター組み立て時において、キャリッジ22のプラテン46と対向する位置に反射型の距離センサーを着脱可能に取り付け、その状態でうねり情報作成ルーチンを実行する。距離センサーは、センサー自身からプラテン46の表面までの距離を測定するものであり、コントローラー60に測定情報を出力可能に取り付けられている。この距離センサーは、メインキャリッジ51との位置関係が予め決められている。なお、距離センサーは、このルーチンの終了後にキャリッジ22から取り外される。
【0025】
オペレーターがインクジェットプリンター20の図示しない操作パネルを操作してうねり情報作成ルーチンの開始を指令すると、コントローラー60のCPU62は、このルーチンを開始する。うねり情報作成ルーチンが開始されると、CPU62は、まず、印刷範囲の一端(図1の右端)に位置するキャリッジ22の主走査方向への移動を開始させる(ステップS100)。具体的には、キャリッジモーター34によりキャリッジベルト32を駆動することにより、キャリッジ22を印刷範囲の一端から他端(図1の左端)までの移動を開始させる。続いて、CPU62は、キャリッジポジションセンサー36からのキャリッジ22の位置に基づいて、キャリッジ22が測定ポイントに到達したか否かを判定する(ステップS102)。測定ポイントは、光学スケール36aの分解能と印刷ヘッド24の印刷範囲の全長とを考慮して適宜設定されている。本実施形態では、印刷範囲の全長を8等分した各等分点と印刷範囲の始点及び終点の合計9箇所が測定ポイントとして設定されているものとする。キャリッジ22が測定ポイントに到達していたならば、CPU62は距離センサーからの距離情報を取得し、これを今回の測定ポイントと対応づけて内部の揮発メモリ66に記憶する(ステップS104)。ステップS104の後又はステップS102で測定ポイントに到達してなかった場合には、キャリッジ22が印刷範囲の他端つまり終点に到達したか否かを判定し(ステップS106)、終点に到達していなければ、再びステップS102に戻る。これにより、キャリッジ22が印刷範囲の一端から他端まで移動する期間中、測定ポイントに到達する毎に測定ポイントに対応する形式で距離情報が記憶される。一方、ステップS106でキャリッジ22が印刷範囲の他端つまり終点に到達していたならば、キャリッジ22をホームポジションに戻し(ステップS108)、プラテン46のうねりに関する情報を作成してこれを不揮発メモリ64に格納し(ステップS110)、本ルーチンを終了する。うねりに関する情報は、次のようにして作成する。まず、距離センサーから得られる距離は、プラテン46と距離センサーとの距離を表すから、距離センサーの取付位置を基準位置とし、得られた距離を基準位置からプラテン46までの距離として取り扱う。このときの一例を図5(a)に示す。次に、隣接する2つの測定ポイントの間の基準位置からプラテン46までの距離を、両測定ポイントにおける距離を表す点を直線で結ぶことにより補完する。このようにして、光学スケール36aの目盛りに対する、基準位置からプラテン46までの距離(うねり)を求め、それをうねりに関する情報として不揮発メモリ64に格納する。うねりに関する情報の一例を図5(b)に示す。
【0026】
次に、コントローラー60のCPU62により実行されるプラテンギャップ調整ルーチンについて説明する。図6は、このルーチンの一例を示すフローチャートである。このルーチンは、ユーザーPC10のプリンタードライバー18aから印刷ジョブを受け取り、その印刷ジョブに基づいて用紙Pに画像を形成する画像形成ルーチンと並行して実行される。なお、画像形成ルーチンでは、CPU62は、キャリッジ22を主走査方向に沿って走査領域の一端から他端まで移動させながら印刷ヘッド24のノズルからインクを用紙Pへ吐出させ、その後紙送り機構41により用紙Pを所定量紙送りするという一連の動作を繰り返すことにより、用紙Pに画像を形成する。
【0027】
さて、プラテンギャップ調整ルーチンが開始されると、CPU62は、キャリッジ22の順方向への移動を開始させる(ステップS200)。順方向とは、図1において主走査方向のうち右から左に向かう方向をいう。そして、キャリッジ22の移動中、うねりに関する情報に基づくプラテンギャップPGの制御を実行する(ステップS202)。具体的には、用紙Pの厚みなどを考慮して予めプラテンギャップPGが所定距離dに設定されているとする。CPU62は、キャリッジポジションセンサー36からのキャリッジ22の位置が変化する毎に、そのキャリッジ22の位置に対応するうねりを読み出し、プラテン46から印刷ヘッド24までの距離が絶えず所定距離dとなるようにヘッド調整機構50のカム駆動モーター56を駆動して、プラテンギャップPGを調整する。光学スケール36aの目盛りに対するうねりが図5(b)であるとすると、印刷ヘッド24は図7に示すように印刷ヘッド24の印刷範囲において、印刷ヘッド24がプラテン46のうねりに追従して上下動する。これにより、プラテンギャップPGは絶えず所定距離dとなる。
【0028】
続いて、CPU62は、キャリッジ22が印刷範囲の終点に到達したか否かを判定し(ステップS204)、終点に到達していなければ再びステップS202に戻る。一方、終点に到達したならば、印刷が終了したか否か、つまり印刷ジョブに基づく用紙Pへの画像形成が終了したか否かを判定する(ステップS206)。印刷が終了していなければ、CPU62は、キャリッジ22の逆方向への移動を開始させる(ステップS208)。逆方向とは、図1において主走査方向のうち左から右に向かう方向をいう。そして、キャリッジ22の移動中、うねりに関する情報に基づくプラテンギャップPGの制御を実行する(ステップS210)。この点は上述したステップS202と同様である。続いて、CPU62は、キャリッジ22が印刷範囲の終点に到達したか否かを判定し(ステップS212)、終点に到達していなければ再びステップS210に戻る。一方、終点に到達したならば、印刷が終了したか否か、つまり印刷ジョブに基づく用紙Pへの画像形成が終了したか否かを判定する(ステップS214)。そして、印刷が終了していなければ、ステップS200に戻る。一方、ステップS206又はS214で印刷が終了していたならば、キャリッジ22をホームポジションに戻し(ステップS216)、本ルーチンを終了する。
【0029】
ここで、本実施形態の構成要素と本発明の構成要素との対応関係を明らかにする。本実施形態のインクジェットプリンター20が本発明の画像形成装置に相当し、印刷ヘッド24がヘッドに相当し、プラテン46がプラテンに相当し、コントローラー60の不揮発メモリ64が記憶手段に相当し、ヘッド調整機構50が距離変更手段に相当し、コントローラー60のCPU62が制御手段に相当する。また、コイルバネ54が付勢手段に相当し、偏心カム58が偏心カムに相当し、カム駆動モーター56が駆動手段に相当し、サブキャリッジ52がヘッドの支持体に相当する。
【0030】
以上説明した本実施形態によれば、印刷ヘッド24の印刷範囲の全域にわたる、プラテン46のうねりに関する情報を、用紙Pに画像を形成する前に不揮発メモリ64に格納している。そして、用紙Pに画像を形成するために印刷ヘッド24の印刷範囲の全域にわたって印刷ヘッド24を走査する際に、不揮発メモリ64に格納されたプラテン46のうねりに関する情報に応じて、プラテンギャップPGを変更するようヘッド調整機構50を制御する。したがって、プラテン46のうねりを考慮してプラテンギャップPGを適正に調整することができる。
【0031】
また、CPU62は、印刷ヘッド24の印刷範囲の全域にわたって印刷ヘッド24を走査する際に、プラテンギャップPGが予め定められた所定距離dとなるように、プラテン46のうねりに関する情報に応じてヘッド調整機構50を制御する。このため、印刷ヘッド24の印刷範囲の全域にわたって印刷ヘッド24を走査する際、プラテン46にうねりが生じていたとしても、プラテンギャップPGを絶えず一定に保つことができる。
【0032】
更に、印刷ヘッド24は、この印刷ヘッド24の走査範囲の全域にわたって架設されたガイド軸28に沿って移動するキャリッジ22に設けられ、ヘッド調整機構50は、印刷ヘッド24をプラテン46に対して接近・離間させるものである。このため、例えば印刷ヘッド24を搭載したキャリッジ22を含むガイド軸28をプラテン46に対して接近・離間させる場合に比べて、印刷ヘッド24をプラテン46に対して接近・離間させればよいため、プラテンギャップPGを変更するための負荷が軽くなる。
【0033】
更にまた、ヘッド調整機構50として、上述したようにメイン及びサブキャリッジ51,52と、コイルバネ54と、偏心カム58と、カム駆動モーター56とを有する機構を採用したため、構成が簡易である。
【0034】
なお、本発明は上述した実施形態に何ら限定されることはなく、本発明の技術的範囲に属する限り種々の態様で実施し得ることはいうまでもない。
【0035】
例えば、上述した実施形態では、うねり情報作成ルーチンにおいて基準位置からプラテン46までの距離を測定する測定ポイントの数を9箇所としたが、測定ポイントの数をこれより少なくしてもよいし、多くしてもよい。プラテン46のうねりを考慮してプラテンギャップPGを適正に調整するにあたり、測定ポイントの数が多いほど調整の精度が向上するため好ましい。例えば、光学スケール36aの分解能と印刷ヘッド24の印刷範囲の全長とを考慮して、測定ポイントの数が最大となるようにしてもよい。
【0036】
上述した実施形態において、プラテンギャップ調整ルーチンでうねり情報に基づいてプラテンギャップPGを制御するにあたり、ヘッド調整機構50によるプラテン46と印刷ヘッド24との距離の変更に要する時間を考慮して、プラテン46のうねりに関する情報のうち実際の印刷ヘッド24の位置よりも先の位置に対応する情報を読み出し、該読み出した情報に応じてヘッド調整機構50を制御してもよい。こうすれば、ヘッド調整機構50を制御する際に、ヘッド調整機構50によるプラテン46と印刷ヘッド24との距離の変更に要する時間に起因する制御遅れが発生することがない。
【0037】
上述した実施形態では、偏心カム58は、無段階にプラテンギャップPGを調整できるようにカム面を曲面(円柱の側面とか楕円柱の側面)としたが、多段階にプラテンギャップPGを調整できるようにカム面を多角柱の側面としてもよい。
【0038】
上述した実施形態では、ヘッド調整機構50のコイルバネ54は印刷ヘッド24が搭載されたサブキャリッジ52をプラテン46とは逆側に向かって付勢するものとしたが、サブキャリッジ52をプラテン46に向かって付勢するコイルバネを採用してもよい。例えば、図8に示すヘッド調整機構150は、コイルバネ154と、偏心カム158と、カム駆動モーター156とを備えている。コイルバネ154は、サブキャリッジ52の上面とメインキャリッジ51のヒサシ部51aとの間に設けられ、サブキャリッジ52をプラテン46に向かって付勢している。偏心カム158は、メインキャリッジ52のヒサシ部52aとメインキャリッジ51のヒサシ部51aとの間に設けられ、ヒサシ部51aの上面にカム面が接触し、コイルバネ154の付勢に抗して印刷ヘッド24を備えたサブキャリッジ52を固定する役割を果たす。カム駆動モーター156は、ヒサシ部52aの裏面に固定され、偏心カム158のカム軸158aを回転駆動する役割を果たす。このヘッド調整機構150も、偏心カム158のカム軸158aを回転させることにより、プラテンギャップPGを調整することができる。図8の実線はプラテンギャップPGが狭いときを示し、一点鎖線はプラテンギャップPGが広いときを示す。なお、カム駆動モーター156をヒサシ部51aの上面に固定し、カム面158aをヒサシ部52aの裏面に接触するように構成してもよい。
【0039】
上述した実施形態では、距離センサーをうねり情報作成ルーチンの終了後にキャリッジ22から取り外すものとしたが、うねり情報作成ルーチンの終了後もキャリッジ22に取り付けたままとしてもよい。
【0040】
上述した実施形態では、ヘッド調整機構50として、印刷ヘッド24を搭載したサブキャリッジ52をプラテン46に対して接近・離間させる機構を採用したが、印刷ヘッド24を搭載したキャリッジ22を含むガイド軸28ごと、プラテン46に対して接近・離間させる機構を採用してもよい。
【符号の説明】
【0041】
10 ユーザーPC、12 CPU、14 ROM、16 RAM、18 HDD、18a プリンタードライバー、20 インクジェットプリンター、21 プリンター機構、22 キャリッジ、24 印刷ヘッド、26 インクカートリッジ、28 ガイド軸、32 キャリッジベルト、34 キャリッジモーター、35 従動ローラー、36 キャリッジポジションセンサー、36a 光学スケール、36b 光学センサー、41 紙送り機構、42 搬送ローラー、44 搬送モーター、46 プラテン、49 ロータリーエンコーダー、50 ヘッド調整機構、51 メインキャリッジ、51a ヒサシ部、51b ガイド軸挿通部、51c レール、52 サブキャリッジ、52a ヒサシ部、52c レール溝、54 コイルバネ、56 カム駆動モーター、58 偏心カム、58a カム軸、60 コントローラー、62 CPU、64 不揮発メモリ、66 揮発メモリ、68 フレーム、150 ヘッド調整機構、154 コイルバネ、156 カム駆動モーター、158 偏心カム、158a カム軸、d 所定距離、P 用紙、PG プラテンギャップ
【特許請求の範囲】
【請求項1】
所定の走査方向に移動しながらインクを吐出するヘッドと、
前記ヘッドの印刷範囲の全域にわたって設けられ、前記ヘッドから吐出されたインクによって画像が形成される印刷媒体を支持するプラテンと、
前記ヘッドの印刷範囲の全域にわたる、前記プラテンのうねりに関する情報を前記印刷媒体に画像を形成する前に格納する記憶手段と、
前記プラテンに対する前記ヘッドの距離を変更する距離変更手段と、
前記印刷媒体に画像を形成するために前記ヘッドの印刷範囲の全域にわたって前記ヘッドを走査する際に、前記記憶手段に格納された前記プラテンのうねりに関する情報に応じて前記距離変更手段を制御する制御手段と、
を備えた画像形成装置。
【請求項2】
前記制御手段は、前記ヘッドの印刷範囲の全域にわたって前記ヘッドを走査する際に、前記プラテンに対する前記ヘッドの距離が予め定められた所定距離となるよう前記プラテンのうねりに関する情報に応じて前記距離変更手段を制御する、
請求項1に記載の画像形成装置。
【請求項3】
前記制御手段は、前記プラテンのうねりに関する情報に応じて前記距離変更手段を制御するにあたり、前記距離変更手段による前記ヘッドの距離の変更に要する時間を考慮して、前記プラテンのうねりに関する情報を実際の前記ヘッドの位置よりも先の位置に対応する情報を読み出し、該読み出した情報に応じて前記距離変更手段を制御する、
請求項1又は2に記載の画像形成装置。
【請求項4】
前記ヘッドは、該ヘッドの走査範囲の全域にわたって架設されたガイド軸に沿って移動するキャリッジに設けられ、
前記距離変更手段は、前記ヘッドを前記プラテンに対して接近・離間させるヘッド調整機構である、
請求項1〜3のいずれか1項に記載の画像形成装置。
【請求項5】
前記ヘッド調整機構は、前記ヘッドを支持する支持体を前記プラテンに向かって又は前記プラテンとは逆側に向かって付勢する付勢手段と、カム面により前記付勢手段の付勢に抗して前記支持体を固定する偏心カムと、該偏心カムを回転駆動する駆動手段とを有する、
請求項4に記載の画像形成装置。
【請求項6】
前記駆動手段は、ムービングコイル方式のモーターである、
請求項5に記載の画像形成装置。
【請求項7】
1又は複数のコンピュータを、請求項1〜6のいずれか1項に記載の画像形成装置の前記記憶手段及び前記制御手段として機能させるためのプログラム。
【請求項1】
所定の走査方向に移動しながらインクを吐出するヘッドと、
前記ヘッドの印刷範囲の全域にわたって設けられ、前記ヘッドから吐出されたインクによって画像が形成される印刷媒体を支持するプラテンと、
前記ヘッドの印刷範囲の全域にわたる、前記プラテンのうねりに関する情報を前記印刷媒体に画像を形成する前に格納する記憶手段と、
前記プラテンに対する前記ヘッドの距離を変更する距離変更手段と、
前記印刷媒体に画像を形成するために前記ヘッドの印刷範囲の全域にわたって前記ヘッドを走査する際に、前記記憶手段に格納された前記プラテンのうねりに関する情報に応じて前記距離変更手段を制御する制御手段と、
を備えた画像形成装置。
【請求項2】
前記制御手段は、前記ヘッドの印刷範囲の全域にわたって前記ヘッドを走査する際に、前記プラテンに対する前記ヘッドの距離が予め定められた所定距離となるよう前記プラテンのうねりに関する情報に応じて前記距離変更手段を制御する、
請求項1に記載の画像形成装置。
【請求項3】
前記制御手段は、前記プラテンのうねりに関する情報に応じて前記距離変更手段を制御するにあたり、前記距離変更手段による前記ヘッドの距離の変更に要する時間を考慮して、前記プラテンのうねりに関する情報を実際の前記ヘッドの位置よりも先の位置に対応する情報を読み出し、該読み出した情報に応じて前記距離変更手段を制御する、
請求項1又は2に記載の画像形成装置。
【請求項4】
前記ヘッドは、該ヘッドの走査範囲の全域にわたって架設されたガイド軸に沿って移動するキャリッジに設けられ、
前記距離変更手段は、前記ヘッドを前記プラテンに対して接近・離間させるヘッド調整機構である、
請求項1〜3のいずれか1項に記載の画像形成装置。
【請求項5】
前記ヘッド調整機構は、前記ヘッドを支持する支持体を前記プラテンに向かって又は前記プラテンとは逆側に向かって付勢する付勢手段と、カム面により前記付勢手段の付勢に抗して前記支持体を固定する偏心カムと、該偏心カムを回転駆動する駆動手段とを有する、
請求項4に記載の画像形成装置。
【請求項6】
前記駆動手段は、ムービングコイル方式のモーターである、
請求項5に記載の画像形成装置。
【請求項7】
1又は複数のコンピュータを、請求項1〜6のいずれか1項に記載の画像形成装置の前記記憶手段及び前記制御手段として機能させるためのプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−111968(P2013−111968A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−263444(P2011−263444)
【出願日】平成23年12月1日(2011.12.1)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年12月1日(2011.12.1)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]