
自動溶接装置における溶接トーチの位置決め方法及び装置
【課題】 枝管溶接機の馬蹄型ガイドの溶接対象の枝管や他の枝管との干渉を防止する。
【解決手段】 ロボットハンド12の先端部に設けた旋回台13の側面の一個所に、馬蹄型ガイド5と円周動作する溶接トーチ11を備えた枝管溶接機4を取り付ける。旋回台13における枝管溶接機4の取付位置に対して180度方向の側面に、外向きに延びる探触子14を設ける。母管1に仮付けされた溶接対象の枝管2aに対し、先ず、探触子4によるタッチセンシングを行って、母管1の長手方向とそれに直交する水平方向であるXY軸方向の位置を検出する。その後、旋回台13を反転させ、枝管溶接機4の馬蹄型ガイド5を、溶接対象の枝管2aとのX軸方向位置を合わせてから、Y軸方向へのみ移動させて、溶接対象の枝管2aに外嵌させて、溶接トーチ11の円周動作の軌道の中央に溶接対象の枝管2aを配置させる。
【解決手段】 ロボットハンド12の先端部に設けた旋回台13の側面の一個所に、馬蹄型ガイド5と円周動作する溶接トーチ11を備えた枝管溶接機4を取り付ける。旋回台13における枝管溶接機4の取付位置に対して180度方向の側面に、外向きに延びる探触子14を設ける。母管1に仮付けされた溶接対象の枝管2aに対し、先ず、探触子4によるタッチセンシングを行って、母管1の長手方向とそれに直交する水平方向であるXY軸方向の位置を検出する。その後、旋回台13を反転させ、枝管溶接機4の馬蹄型ガイド5を、溶接対象の枝管2aとのX軸方向位置を合わせてから、Y軸方向へのみ移動させて、溶接対象の枝管2aに外嵌させて、溶接トーチ11の円周動作の軌道の中央に溶接対象の枝管2aを配置させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、母管の円周方向及び長手方向に多数の枝管を溶接するために用いる自動溶接装置における溶接トーチを、母管と枝管との溶接個所に対応させて配置するために用いる自動溶接装置における溶接トーチの位置決め方法及び装置に関するものである。
【背景技術】
【0002】
ボイラ等におけるヘッダ(管寄せ)の1つの形式として、母管の外周面に、円周方向及び長手方向(軸心方向)に複数の枝管を接続した形式のものがある。
【0003】
この種のヘッダを製造する場合、横向きに配置した母管の外周面における周方向の1個所、たとえば、外周面の上端側位置に、該母管の長手方向に所要間隔で配列される複数の枝管を溶接して取り付け、次いで、上記母管を、周方向に所要角度回転させてから、新たに該母管の外周面の上端側となる位置に、長手方向に所要間隔で配列される複数の枝管を溶接して取り付け、以降、上記手順を順次繰り返して行うことで、上記母管の外周面の円周方向及び長手方向に多数の枝管を取り付ける手法が多く用いられている。
【0004】
又、上記横向きに配置した母管の外周面における上端側位置に該母管の長手方向に所要間隔で配列される枝管を取り付けるための溶接作業を、溶接トーチを備えたロボットを用いて自動化できるようにした自動溶接装置が提案されている。
【0005】
上記のような母管に対する枝管の溶接作業について、ロボットを用いて自動化させる場合は、該ロボットに備えた溶接トーチを、枝管と母管との間の溶接個所に対し周方向の全周に沿わせて正確に移動させる必要があるため、ロボットにより枝管と母管との溶接個所を予め検出させて、その検出された溶接個所の位置に応じて溶接トーチによる溶接位置の位置決めを行わせるようにすることが重要となる。
【0006】
そのために、たとえば、ロボットに備えた溶接トーチの先端に設けてあるチップを探触子として、上記母管の長手方向に配列される複数の枝管のうちから選んだ1つの基準枝管と、その近傍の母管の位置をタッチセンシングにより検出し、上記基準枝管についての位置データと、上記母管の長手方向に配列する各枝管の配列ピッチを基に、他の枝管と、該枝管近傍の母管の位置を算出して、溶接トーチによる溶接位置を定める手法が従来提案されている(たとえば、特許文献1参照)。
【0007】
又、ロボットに備えた溶接トーチの近傍に、探触子(触針センサ)を設けて、母管と枝管の溶接を行う際は、予め母管の所定位置に仮付けしてある溶接対象となる枝管について、上記探触子によるタッチセンシングを行い、その検出結果を基に、溶接対象となる枝管を鉛直に配置させ且つ上記ロボットの移動方向が上記母管の軸心方向に対して平行になるようにするための補正量を求めて、該求められた補正量に応じて上記母管の周方向角度と上下方向の傾き、及び、水平面内での位置(角度)を補正させる手法も従来提案されている(たとえば、特許文献2参照)。
【0008】
ところで、本出願人は、上記ヘッダ製造時における母管と枝管との溶接作業を行う際に、通常の溶接トーチではアクセスが困難な狭隘部であっても、枝管の周方向の全周に亘り溶接トーチを移動させながら隅肉溶接を行うことができるようにするために、図8及び図9に示す如き自動溶接装置を従来提案している。
【0009】
これは、図8に示すように、母管1の長手方向に沿って該母管1の長手方向に配列して取り付ける複数の枝管2の取付位置に応じて移動可能に設けた多関節ロボット3の先端側に、枝管溶接機(スタブ管溶接機)4を取り付けた構成としてある。
【0010】
更に、上記枝管溶接機4は、図9に示すように、枝管2を半径方向から挿入して包囲可能な切欠部5aを備えた馬蹄型ガイド5と、上記枝管2を半径方向から挿入して包囲可能な切欠部6aを備え且つ上記馬蹄型ガイド5の下側に該馬蹄型ガイド5の切欠部5aを超えて回転可能に支持された切欠付リングギア6と、上記馬蹄型ガイド5に対し上記リングギア6を相対的に回転駆動させる駆動機構7と、上記リングギア6に固定された該リングギア6と同じ位置に切欠部8aを備えたトーチ取付部材8と、該トーチ取付部材8の下側にスライドガイド10を介して径方向にスライド可能に取り付けたトーチ支持ブロック9と、該トーチ支持ブロック9に下向きに取り付けると共に下端部が上記リングギア6の中心側に向くように取り付けた溶接トーチ11とからなる構成としてある。
【0011】
これにより、上記枝管溶接機4では、上記リングギア6の切欠部6aの位相を、上記馬蹄型ガイド5の切欠部5aの位相に合わせた状態で、上記多関節ロボット3の操作により枝管溶接機4を、母管1の外周面の上端側位置に仮止めしてある枝管2に対し側方より近接させて、該枝管溶接機4の馬蹄型ガイド5及びリングギア6の切欠部5a,6aを、上記枝管2に外嵌させ、これにより、上記リングギア6にトーチ取付部材8、スライドガイド10及びトーチ支持ブロック9を介して取り付けてある上記溶接トーチ11を、上記枝管2と母管1との溶接個所の周方向の1個所に向けて配置できるようにしてある。
【0012】
よって、その後、上記駆動機構7によりリングギア6を駆動させると、該リングギア6と一緒に上記溶接トーチ11は、上記枝管2の周りで、上記馬蹄型ガイド5の切欠部5aを越えて周回動作させられるようにしてある。
【0013】
したがって、この周回動作する溶接トーチ11により、上記馬蹄型ガイド5の内側に配置させている枝管2とその下方の母管1との溶接個所は、周方向の全周に亘って溶接できるようにしてある。
【0014】
なお、上記図8及び図9に示した自動溶接装置において、上記枝管2と母管1との溶接個所に対する溶接トーチ11の位置決め精度を高めるためには、枝管2に対する馬蹄型ガイド5の軸心ずれ及び傾きを調整する必要がある。
【0015】
そこで、上記馬蹄型ガイド5の切欠部5aのU字状開口を挟んだ先端部に、互いに対抗する光学センサ、又は、探触子を取り付けて、上記枝管2の位置や該馬蹄型ガイド5に対する相対的な傾きを検出し、該検出された枝管2の位置や相対的な傾きに応じて上記馬蹄型ガイド5の配置を調整させるようにすることが提案されている(たとえば、特許文献3参照)。
【先行技術文献】
【特許文献】
【0016】
【特許文献1】特許第3385390号公報
【特許文献2】特公平4−31748号公報
【特許文献3】特開平10−193112号公報
【発明の概要】
【発明が解決しようとする課題】
【0017】
ところが、特許文献1に示されたように、基準枝管についてのみタッチセンシングによる位置検出を行い、該基準枝管の位置データからその他の枝管の位置を算出する手法では、基準枝管以外の個々の枝管のずれや母管の歪み等による誤差が考慮されない。
【0018】
しかし、実際には、枝管の溶接時の熱の影響により母管自体が撓んだり、歪んだりすることがあり、又、上記母管における枝管取り付け部分には、該枝管に連通させるための孔が設けてあるが、この孔自体の精度によっても誤差が生じるため、基準枝管以外の枝管については、母管との溶接個所に対して、溶接トーチを正確に配置できなくなる可能性がある。
【0019】
特許文献2に示されたように、母管に仮付けされた枝管の位置をタッチセンシングにより検出し、その検出結果に応じて母管側を動かすことで枝管の位置の補正を実施する手法では、母管が大型になると、該母管を移動させる大掛かりな位置決め装置が必要になるという問題が生じてしまう。
【0020】
なお、特許文献3に示された自動溶接装置における枝管溶接機4の馬蹄型ガイド5の先端部に、光学センサ又は探触子を取り付けて、枝管2の位置や馬蹄型ガイド5に対する相対的な傾きを検出する手法は、該検出された枝管2の位置や相対的な傾きに応じて上記馬蹄型ガイド5の配置を調整することができて、各枝管2と母管1との溶接個所に対し上記枝管溶接機4の溶接トーチ11を正確に配置するのに有効である。
【0021】
ところで、近年、ヘッダとして、母管1の周方向及び長手方向に枝管2を密に配置した構成のヘッダが求められることがあり、この場合は、上記母管1に取り付ける枝管2の隣接するもの同士の間隔が狭くなる。そのため、上記馬蹄型ガイド5を溶接対象となる枝管2に外嵌させる際には、該馬蹄型ガイド5の切欠部5aのU字状開口を挟んだ2つの先端部を、溶接対象となる枝管2と、その両側に隣接する枝管2との間の狭い隙間へ正確に差し込む必要が生じる。
【0022】
この場合は、上記馬蹄型ガイド5を溶接対象となる枝管2に外嵌させる以前に、該溶接対象となる枝管2の位置や馬蹄型ガイド5との相対的な傾きを検出することが望まれるようになるが、馬蹄型ガイド5の先端部に設ける光学センサでは、該馬蹄型ガイド5を外嵌させる以前の枝管2の位置の検出は難しいと考えられる。
【0023】
一方、馬蹄型ガイド5の先端部に探触子を設けた場合は、馬蹄型ガイド5を外嵌させる前に溶接対象となる枝管2の位置を検出することは可能であるが、たとえば、母管1の周方向に関する枝管2の取付位置が、母管1の長手方向にずれている場合は、上記馬蹄型ガイド5を溶接対象となる枝管2に対して外嵌させるときに、該馬蹄型ガイド5の先端部の上記探触子が、母管1に既に取り付けられている他の枝管2に干渉する虞が生じることが考えられる。
【0024】
そこで、本発明は、上記特許文献3に示された自動溶接装置を更に発展させて、母管の周方向及び長手方向に枝管を密に配置する場合であっても、枝管溶接機の馬蹄型ガイドを溶接対象となる枝管に外嵌させる前に、該溶接対象となる枝管の位置を検出することができて、上記馬蹄型ガイドを上記溶接対象となる枝管に正確に外嵌させることができ、上記枝管溶接機の円周動作する溶接トーチの円周軌道の中央に、上記溶接対象となる枝管を正確に配置できて、上記溶接トーチを、該溶接対象となる枝管と母管との溶接個所の周方向の全周に沿って移動可能に配置できるようにするための自動溶接装置における溶接トーチの位置決め方法及び装置を提供しようとするものである。
【課題を解決するための手段】
【0025】
本発明は、上記課題を解決するために、請求項1に対応して、ロボットのロボットハンドの先端部に設けた旋回台の旋回軸心と直交する方向の側面における溶接対象の枝管に外嵌させるための切欠部を有するガイドと、該ガイドに保持され且つ上記切欠部を超えて円周動作できるようにしてある溶接トーチとを備えてなる枝管溶接機の取付位置に対して、上記旋回台の旋回軸心を中心として90度以上、270度以下の範囲に収まるように設けた枝管検出センサを、母管に仮付けされた溶接対象の枝管に向けて配置して、該枝管検出センサにより上記溶接対象の枝管の母管長手方向に関する位置を検出し、次いで、上記旋回台の旋回により上記溶接対象の枝管に向けた上記枝管溶接機のガイドを、上記溶接対象の枝管に対し母管の長手方向に直交する水平方向の片側に配置した後、該枝管溶接機を、母管の長手方向に直交する水平方向に沿って移動させて、上記ガイドを上記溶接対象の枝管に外嵌させるようにする自動溶接装置における溶接トーチの位置決め方法とする。
【0026】
又、上記構成において、枝管溶接機のガイドを溶接対象の枝管に外嵌させた後、上記枝管溶接機の円周動作する溶接トーチを、上記溶接対象の枝管の周りを移動させると共に、周方向の複数個所で、該溶接トーチのワイヤを探触子として、上記溶接対象の枝管の位置と、その下方近傍に位置する母管との溶接個所のタッチセンシングを行い、得られた位置情報を周方向に連係させて上記溶接個所の周方向の全周に亘りその詳細な位置情報を得て、その位置情報を基に、上記ロボットによる溶接トーチのずれ量を補正させるようにする。
【0027】
更に、上記各構成において、枝管検出センサにより、母管に仮付けされた溶接対象の枝管の上記母管の長手方向に関する位置に加えて、上記溶接対象の枝管の母管の長手方向に直交する水平方向の位置を検出し、枝管溶接機を、母管の長手方向に直交する水平方向に沿って移動させて、上記ガイドを上記溶接対象の枝管に外嵌させるときに、該溶接対象の枝管が、上記枝管溶接機の溶接トーチの円周動作する軌道の中央に配置される位置で枝管溶接機を停止させるようにする。
【0028】
同様に、上記各構成において、枝管溶接機を、母管の長手方向に直交する水平方向に沿って移動させて、ガイドを上記溶接対象の枝管に外嵌させるときに、上記ガイドにおける切欠部の奥側端部に設けた変位センサにより検出される溶接対象の枝管が、上記枝管溶接機の溶接トーチの円周動作する軌道の中央に配置される位置で枝管溶接機を停止させるようにする。
【0029】
又、請求項5に対応して、ロボットにより溶接対象の枝管に外嵌させるための切欠部を有するガイドと、該ガイドに保持され且つ上記切欠部を超えて円周動作できるようにしてある溶接トーチとを備えてなる枝管溶接機を操作できるようにしてある自動溶接装置におけるロボットのロボットハンドの先端部に旋回台を設けて、該旋回台の旋回軸心と直交する方向の側面に、上記枝管溶接機を取り付け、更に、上記旋回台における上記枝管溶接機の取付位置に対して、該旋回台の旋回軸心を中心として90度以上、270度以下の範囲に収まるように、母管に仮付けされた溶接対象の枝管について少なくとも母管の長手方向に関する位置を検出するための枝管検出センサを設けてなる構成を有する自動溶接装置における溶接トーチの位置決め装置とする。
【発明の効果】
【0030】
本発明によれば、以下のような優れた効果を発揮する。
(1)ロボットのロボットハンドの先端部に設けた旋回台の旋回軸心と直交する方向の側面における溶接対象の枝管に外嵌させるための切欠部を有するガイドと、該ガイドに保持され且つ上記切欠部を超えて円周動作できるようにしてある溶接トーチとを備えてなる枝管溶接機の取付位置に対して、上記旋回台の旋回軸心を中心として90度以上、270度以下の範囲に収まるように設けた枝管検出センサを、母管に仮付けされた溶接対象の枝管に向けて配置して、該枝管検出センサにより上記溶接対象の枝管の母管長手方向に関する位置を検出し、次いで、上記旋回台の旋回により上記溶接対象の枝管に向けた上記枝管溶接機のガイドを、上記溶接対象の枝管に対し母管の長手方向に直交する水平方向の片側に配置した後、該枝管溶接機を、母管の長手方向に直交する水平方向に沿って移動させて、上記ガイドを上記溶接対象の枝管に外嵌させるようにする自動溶接装置における溶接トーチの位置決め方法、及び、ロボットにより溶接対象の枝管に外嵌させるための切欠部を有するガイドと、該ガイドに保持され且つ上記切欠部を超えて円周動作できるようにしてある溶接トーチとを備えてなる枝管溶接機を操作できるようにしてある自動溶接装置におけるロボットのロボットハンドの先端部に旋回台を設けて、該旋回台の旋回軸心と直交する方向の側面に、上記枝管溶接機を取り付け、更に、上記旋回台における上記枝管溶接機の取付位置に対して、該旋回台の旋回軸心を中心として90度以上、270度以下の範囲に収まるように、母管に仮付けされた溶接対象の枝管について少なくとも母管の長手方向に関する位置を検出するための枝管検出センサを設けてなる構成を有する自動溶接装置における溶接トーチの位置決め装置としてあるので、母管の周方向及び長手方向に枝管を密に配置して接続した構成のヘッダを製造する場合のように、上記母管に取り付ける枝管の隣接するもの同士の間隔が狭くなる場合であっても、ロボットのロボットハンドに旋回台を介して取り付けてある枝管溶接機のガイドを、母管の長手方向に沿って仮付けされた複数の枝管のうちの溶接対象となる枝管に正確に外嵌させることができる。
(2)更に、このガイドの溶接対象の枝管に対する外嵌の際に、該ガイドが溶接対象の枝管や、母管に既設又は仮付けされた他の枝管に対して干渉する虞を解消することができる。
【図面の簡単な説明】
【0031】
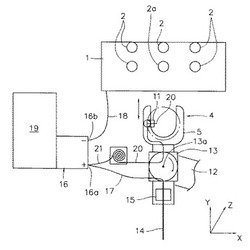
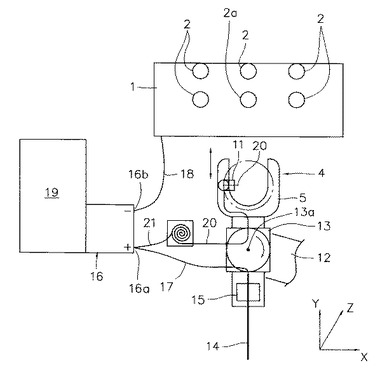
【図1】本発明の自動溶接装置における溶接トーチの位置決め装置の実施の一形態を示す概要図である。
【図2】図1の装置により溶接トーチの位置決めを実施する手順を示すもので、(イ)は探触子による溶接対象となる枝管の前後方向位置のタッチセンシングを行う状態を、(ロ)は探触子による溶接対象となる枝管の左右方向位置のタッチセンシングを行う状態をそれぞれ示す概要図である。
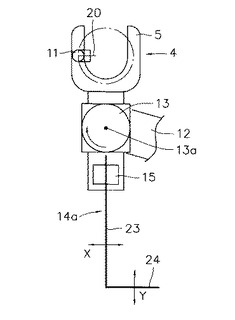
【図3】図1の装置により溶接トーチの位置決めを実施する手順として、図2(ロ)に続く手順を示すもので、枝管溶接機の馬蹄型ガイドを外嵌させた枝管に対して溶接トーチのワイヤによるタッチセンシングを行う状態を示す概要図である。
【図4】本発明の実施の他の形態として、図1の装置における探触子の別の例を示す概要図である。
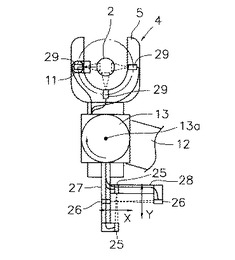
【図5】本発明の実施の更に他の形態として、図1の装置の応用例として、溶接対象となる枝管の前後方向位置を検出するための距離センサを備えた構成を示す概要図である。
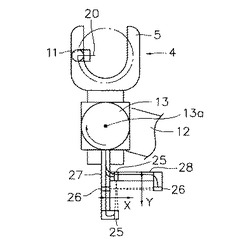
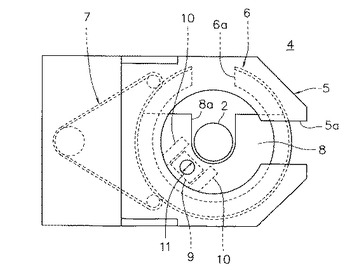
【図6】本発明の実施の更に他の形態として、溶接対象となる枝管の前後方向位置及び左右方向位置を検出するための変位センサを備えた構成を示す概要図である。
【図7】本発明の実施の更に他の形態として、溶接対象となる枝管の前後方向位置及び左右方向位置を検出するための変位センサと、馬蹄型ガイドを外嵌させた枝管の位置をセンシングする変位センサを備えた構成を示す概要図である。
【図8】従来の枝管溶接用の自動溶接装置を示す概略斜視図である。
【図9】図8の自動溶接装置における枝管溶接機を拡大して示す平面図である。
【発明を実施するための形態】
【0032】
以下、本発明を実施するための形態を図面を参照して説明する。
【0033】
図1乃至図3は本発明の自動溶接装置における溶接トーチの位置決め方法及び装置の実施の一形態を示すもので、以下のようにしてある。
【0034】
すなわち、図1は、本発明の自動溶接装置における溶接トーチの位置決め装置を示すもので、母管1の長手方向に沿って図示しない移動機構により移動可能に設けた多関節ロボットにおけるロボットハンド12の先端部に、旋回台13を旋回可能に設ける。
【0035】
上記旋回台13の旋回軸心13aと直交する方向に位置する旋回台13の側面の所要個所に、図8及び図9に示した自動溶接装置における枝管溶接機4と同様に、ガイドとしての馬蹄型ガイド5と、該馬蹄型ガイド5に保持された状態でリングギア6(図9参照)と共に円周動作可能な溶接トーチ11を備えてなる枝管溶接機4を取り付ける。なお、図1では、図示する便宜上、上記多関節ロボットのロボットハンド12の先端部以外の部分、及び、上記枝管溶接機4における馬蹄型ガイド5と溶接トーチ11以外の構成の記載は省略してある。又、図中の一点鎖線で描く円弧は、上記溶接トーチ11の円周動作の軌道の概要を示すものである(後述の図2(イ)(ロ)乃至図7も同様)。
【0036】
更に、上記旋回台13において、上記枝管溶接機4の馬蹄型ガイド5を母管1に仮付けされた溶接対象の枝管2aに対して横方向から外嵌させるときに上記母管1に既設又は仮付けされている他の枝管2と干渉しない方向、具体的には、上記旋回台13の旋回軸心13aを中心として上記枝管溶接機4の取付位置の方向を0度とした場合に周方向に90度以上且つ270度以下となる角度範囲の方向の側面に、枝管検出センサとして、該旋回台13の旋回軸心13aに直交する方向に沿って外方へ所要寸法延びる直線状の探触子14を、取付部材15を介して取り付ける。これにより、上記枝管溶接機4の馬蹄型ガイド5を溶接対象の枝管2aに対し横方向から外嵌させるときには、上記探触子14が、該馬蹄型ガイド5の進行方向に対し直角な方向よりも前側に突出配置されないようにしてあり、溶接対象の枝管2aに対して上記枝管溶接機4の馬蹄型ガイド5を外嵌させて溶接作業を実施する際、上記探触子14が母管1に既設或いは仮付けされている他の枝管2に干渉することがないようにしてある。
【0037】
なお、上記旋回台13の制御や、後述する溶接対象の枝管2aにおける上記探触子14が接触する個所の位置情報の検出を行う際の演算等の処理を容易なものとするという観点からすると、上記旋回台13における上記探触子14の取付位置は、上記枝管溶接機4の取付位置に対して旋回軸心13aを中心に周方向に90度又は180度又は270度となる方向に設定することが望ましい。図では上記旋回台13における上記枝管溶接機4の取付位置に対して旋回軸心13aを中心に180度となる方向の側面に探触子14を取り付けた構成が示してある。
【0038】
上記探触子14には、通電検出式のタッチセンサ16の一方の電極(図では正極)16aを、通電ライン17を介して接続すると共に、該タッチセンサ16の他方の電極(図では負極)16bに一端部を接続した通電ライン18の他端部を、上記母管1に接続する。更に、上記タッチセンサ16による接触検出信号を、上記多関節ロボットの制御(上記旋回台13の旋回や上記枝管溶接機4における溶接トーチ11の円周動作の制御も含む)を行うためのロボットコントローラ19に入力できるようにする。これにより、上記探触子14が上記母管1に仮付けしてある溶接対象の枝管2aに接触すると、その時点で、上記タッチセンサ16により両者の接触を通電により検出できるようにしてある。更に、この接触検出信号が入力される上記ロボットコントローラ19により、該ロボットコントローラ19で制御している上記多関節ロボットのロボットハンド12の先端部の位置情報と、上記旋回台13に取り付けてある上記探触子14の形状(長さ)等についての既知のデータとを基に、上記溶接対象の枝管2aにおける上記探触子14が接触した個所についての位置情報を、たとえば、上記母管1の長手方向となるX軸方向と、それに直角な水平方向であるY軸方向と、上下方向であるZ軸方向についての座標に関して検出できるようにしてある。
【0039】
更に、必要に応じて、上記枝管溶接機4の溶接トーチ11に供給するワイヤ20に、上記タッチセンサ16の一方の電極16aを、通電ライン21を介し接続した構成としてもよい。かかる構成とすれば、後述するように、上記枝管溶接機4の馬蹄型ガイド5を母管1に仮付けしてある溶接対象の枝管2aに外嵌させた状態で、上記溶接トーチ11のワイヤ20を探触子として、上記溶接対象の枝管2aや、その下方近傍に位置する母管1との接触を検出できる。よって、上記した探触子14の場合と同様に、上記ロボットコントローラ19により、該ロボットコントローラ19で制御している上記ロボットハンド12の先端部の位置情報と、上記旋回台13に取り付けてある枝管溶接機4における上記溶接トーチ11の円周動作位置の情報と、該枝管溶接機4の形状及びワイヤ20の突出量についての既知のデータとを基に、上記溶接対象の枝管2aや母管1における溶接トーチ11のワイヤ20が接触した個所の位置情報を、XYZの3軸方向についての座標に関して検出できるようにしてある。
【0040】
以上の構成としてある本発明の自動溶接装置における溶接トーチの位置決め装置を用いて溶接トーチの位置決めを実施する場合は、先ず、母管1の寸法、枝管2の寸法、上記母管1に対し接続する枝管2の配置等に関する既知のデータ、たとえば、設計データを基に、上記多関節ロボットを操作して、ロボットハンド12の先端部の上記旋回台13を、母管1に仮付けした溶接対象の枝管2aに対し上記枝管溶接機4の馬蹄型ガイド5を外嵌させるときの高さ位置に対応する所定のZ座標平面内に、母管1よりY軸方向の一方へ所要寸法離して配置させる。又、この状態で、上記旋回台13の旋回操作により、上記探触子14を、母管1側へ向けてY軸方向に平行に配置させておく。
【0041】
次に、上記母管1の長手方向(X軸方向)の枝管2,2aの接続個所に関する設計データを基に、上記多関節ロボットを操作して、上記探触子14を、図2(イ)に二点鎖線で示すように、溶接対象の枝管2aと、そのX軸方向の一方に隣接する他の枝管2との間に挿入する。この際、上記X軸方向に配列された各枝管2,2aの位置が設計データより大幅に変化していることはなく、一方、上記探触子14は直線状として、水平方向の幅寸法を上記各枝管2,2aのX軸方向の配列間隔に比して大幅に小さくなるようにしてあるため、上記探触子14が上記溶接対象の枝管2aやそのX軸方向の一方に隣接する他の枝管2に接触する虞はない。
【0042】
次いで、図2(イ)に矢印aで示すように、上記多関節ロボットの操作により、上記探触子14を溶接対象の枝管2aの側面に近接する方向へ移動させる。この移動に伴って、図2(イ)に実線で示すように、上記探触子14が上記溶接対象の枝管2aの側面に接触すると、通電開始に基づいてタッチセンサ16により両者の接触が検出される。よって、その接触検出信号が入力されるロボットコントローラ19では、上記溶接対象の枝管2aにおける上記探触子14が接触した個所、すなわち、溶接対象の枝管2aの上記所定のZ座標平面内におけるX軸方向の一方の端部位置についてのX座標が求まる。よって、その求められたX座標と、上記設計データより既知となっている上記溶接対象の枝管2aの半径の寸法から、上記所定のZ座標平面内における溶接対象の枝管2aの中心位置のX座標が検出できるため、その値を上記ロボットコントローラ19に一時記憶させる。
【0043】
上記のようにして所定のZ座標平面内における溶接対象の枝管2aの中心位置のX座標が判明すると、上記ロボットコントローラ19は、多関節ロボットを操作して、上記探触子14を、上記溶接対象の枝管2aとそのX軸方向の一方に隣接する他の枝管2との間からY軸方向の一方(溶接対象の枝管2aから離れる方向)へ一旦引き出し、その後、Y軸方向に平行な配置としてある該探触子14を、上記所定のZ座標平面内で、上記溶接対象の枝管2aの中心位置のX座標と同一のX座標位置に配置させる。
【0044】
次いで、上記多関節ロボットの操作により、上記探触子14を、Y軸方向の他方(溶接対象の枝管2aに接近する方向)へ移動させる。この移動に伴い、図2(ロ)に示すように、上記探触子14の先端部が溶接対象の枝管2aの外周面に接触すると、タッチセンサ16より両者の接触検出信号が上記ロボットコントローラ19へ入力されるため、該ロボットコントローラ19では、上記溶接対象の枝管2aにおける上記探触子14が接触した個所、すなわち、上記所定のZ座標平面内にて、上記溶接対象の枝管2aの外周面におけるY軸方向の一方へ最も突出した個所についての、少なくともY座標を検出し、その値と、上記溶接対象の枝管2aの既知の半径寸法から、上記所定のZ座標平面内における溶接対象の枝管2aの中心位置のY座標を検出して、一時記憶する。これにより、上記所定のZ座標平面内における溶接対象の枝管2aの中心位置のXY座標が明らかとなる。
【0045】
上記のようにして探触子14を用いたタッチセンシングにより上記所定のZ座標平面内における上記溶接対象の枝管2aの中心位置のXY座標の検出が終了すると、上記ロボットコントローラ19は、多関節ロボットを操作して、上記探触子14を上記溶接対象の枝管2aの外周面よりY軸方向の一方へ所要寸法離反させた後、上記旋回台13を180度旋回させて、図1に示すように、上記枝管溶接機4を、馬蹄型ガイド5の切欠部5aがY軸方向に沿って上記溶接対象の枝管2aに臨むように配置する。更に、この際、上記枝管溶接機4における溶接トーチ11の円周動作の中心位置のX座標を、上記検出して記憶してある溶接対象の枝管2aの中心位置のX座標と一致させるようにする。
【0046】
その後、上記ロボットコントローラ19は、多関節ロボットの操作により、上記枝管溶接機4を、上記所定のZ座標平面内でY軸方向の他方へ移動させて、図3に示すように、該枝管溶接機4の馬蹄型ガイド5を、上記溶接対象の枝管2aに外嵌させると共に、該枝管溶接機4における上記溶接トーチ11の円周動作の中心位置のY座標が、上記記憶してある溶接対象の枝管2aの中心位置のY座標と一致する位置で停止させる。これにより、上記溶接対象の枝管2aを、上記枝管溶接機4の溶接トーチ11の円周動作の軌道の中央に正確に配置させることができるようになる。又、上記枝管溶接機4の馬蹄型ガイド5を上記溶接対象の枝管2aに外嵌させるときには、上記所定のZ座標平面内で、上記枝管溶接機4における溶接トーチ11の円周動作の中心位置のX座標と、上記予め計測した溶接対象の枝管2aの中心位置のX座標を一致させた状態としてから、該枝管溶接機4の馬蹄型ガイド5をY軸方向の他方へのみ移動させればよいため、該枝管溶接機4の馬蹄型ガイド5が、上記溶接対象の枝管2aや、母管1に既設又は仮付けしてある他の枝管2に干渉する虞はない。
【0047】
上記のようにして溶接対象の枝管2aに、上記枝管溶接機4の馬蹄型ガイド5を外嵌させると、上記ロボットコントローラ19は、該枝管溶接機4の溶接トーチ11を、上記溶接対象の枝管2aの周りで円周動作させると共に、周方向の複数個所で、溶接トーチ11のワイヤ20を探触子として、上記溶接対象の枝管2aの下端部や、その下方近傍に位置する母管1と接触させるようにして、タッチセンサ16によりそれぞれの個所での通電を基に接触が検出された時点での上記溶接トーチ11のワイヤ20の位置から、上記溶接対象の枝管2aや母管1における溶接トーチ11のワイヤ20が接触した個所について、それぞれXYZの3軸方向の座標を検出するようにする。これにより、上記ロボットコントローラ19では、周方向の複数個所で検出した位置情報を互いに連係させることで、溶接対象の枝管2aと母管1との実際の溶接個所、すなわち、他の枝管2の溶接時の熱により生じた母管1の撓みや歪み、及び、母管1における各枝管2の取付部分に設けてある図示しない孔の精度、更には、上記母管1に仮付けされている溶接対象の枝管2aの傾き等に起因する様々な誤差を含んだ状態の実際の溶接個所について、周方向の全周に亘りその詳細な位置情報を得ることができる。
【0048】
よって、上記ロボットコントローラ19では、上記溶接対象の枝管2aと母管1との実際の溶接個所について得られた詳細な位置情報を基に、上記多関節ロボットへずれ量を補正するためのティーチングを行う。これにより、その後は、上記ティーチングされた多関節ロボットの操作によって、上記溶接トーチ11を上記溶接対象の枝管2aの周りで円周動作させながら、該溶接トーチ11の位置を、上記溶接対象の枝管2aと母管1との実際の溶接個所に対応して調整できるようになる。したがって、上記溶接トーチ11により、上記溶接対象の枝管2aと母管1との溶接個所を、周方向の全周に亘り適切な溶接(隅肉溶接)を実施することができるようになる。
【0049】
したがって、上記母管1に仮付けされた各枝管2について、上記と同様の手順を順次繰り返して実施することにより、上記各枝管2を母管1に順次溶接するときには、個々の枝管2とその下方近傍に位置する母管1との実際の溶接個所を個別に検出できるため、上記枝管溶接機4の円周動作する溶接トーチ11を、各枝管2ごとに個別に検出した実際の溶接個所に対応させて位置調整を行わせるようにすればよい。
【0050】
このように、本発明の自動溶接装置における溶接トーチの位置決め方法及び装置によれば、母管1の周方向及び長手方向に枝管2を密に配置した構成のヘッダを製造するために、上記母管1に取り付ける枝管2の隣接するもの同士の間隔が狭くなる場合であっても、多関節ロボットのロボットハンド12に旋回台13を介して取り付けてある枝管溶接機4の馬蹄型ガイド5を、母管1の長手方向に沿って仮付けされた複数の枝管2のうちの溶接対象となる枝管2aに正確に外嵌させることができる。又、この馬蹄型ガイド5の溶接対象の枝管2aに対する外嵌の際に、該馬蹄型ガイド5が溶接対象の枝管2aや、母管1に既設又は仮付けされた他の枝管2に対して干渉する虞は解消することができる。
【0051】
上記実施の形態においては、母管1に仮付けされた溶接対象の枝管2aに対して枝管溶接機4の馬蹄型ガイド5を外嵌させる以前に、予め、探触子14を用いたタッチセンシングを基に、上記溶接対象の枝管2aに中心位置について上記所定のZ座標平面内におけるXY座標を求めるものとして示した。しかし、上記馬蹄型ガイド5をY軸方向に沿って移動させて、該馬蹄型ガイド5の切欠部5a(図9参照)のU字状開口を挟んだ2つの先端部を、溶接対象の枝管2と、その両側に隣接する枝管2との間の隙間へ正確に差し込むという作業自体は、上記母管1に仮付けされた溶接対象の枝管2aの上記所定のZ座標平面内におけるX座標さえ判明していれば実施可能となる。
【0052】
この点に鑑みて、図4に示すように、上記枝管溶接機4の馬蹄型ガイド5における切欠部5a(図9参照)の奥側の端部の上側に、耐熱型の光学式又は磁気式の変位センサ22を設けてなる構成としてもよい。
【0053】
その他の構成は図1乃至図3に示したものと同様であり、同一のものには同一の符号が付してある。
【0054】
かかる構成とする場合は、上記探触子14では、図2(イ)に示したと同様の上記溶接対象の枝管2aに中心位置について上記所定のZ座標平面内におけるX座標を検出するためのタッチセンシングのみを行うようにし、次いで、該検出された溶接対象の枝管2aの上記所定のZ座標平面内におけるX座標を基に、上記枝管溶接機4を、溶接トーチ11の円周動作の中心位置のX座標を、上記検出して記憶してある溶接対象の枝管2aの中心位置のX座標と一致させた状態で、馬蹄型ガイド5の切欠部5aがY軸方向に沿って上記溶接対象の枝管2aに臨むように配置し、その後、上記枝管溶接機4をY軸方向に沿って移動させて、その馬蹄型ガイド5を、上記溶接対象の枝管2aに外嵌させると、該溶接対象の枝管2aの近接が上記馬蹄型ガイドの切欠部5a(図9参照)の奥側端部に設けてある上記変位センサ22により検出されるようになるため、該枝管溶接機4における上記溶接トーチ11の円周動作の中心位置のY座標が、上記変位センサ22で検出される溶接対象の枝管2aの中心位置と一致する時点で、上記枝管溶接機4をY軸方向の移動を停止させるようにすれば、上記溶接対象の枝管2aを、上記枝管溶接機4の溶接トーチ11の円周動作の軌道の中央に正確に配置させることができるようになる。
【0055】
したがって、この構成としても図1乃至図3の実施の形態と同様の効果を得ることができる。
【0056】
次に、図5は本発明の実施の他の形態として、図1乃至図3の実施の形態における探触子14の変形例を示すものである。
【0057】
すなわち、本実施の形態では、探触子を、旋回台13の旋回軸心13aに直交する方向に沿って外方へ所要寸法延びる直線部23と、該直線部23の先端より直角方向に所要寸法延びる屈曲部24とからなる構成の探触子14aとする。
【0058】
その他の構成は図1乃至図3に示したものと同様であり、同一のものには同一の符号が付してある。
【0059】
以上の構成としてある本実施の形態の自動溶接装置における溶接トーチの位置決め装置を使用する場合は、上記探触子14aを、図2(イ)に示したと同様に、母管1に仮付けしてある溶接対象の枝管2aと、そのX軸方向の一方に隣接する他の枝管2との間に挿入するとき、及び、上記各枝管2aと2の間より引き出すときには、多関節ロボットの操作により上記探触子14の屈曲部24が上下方向の配置となるようにすれば、該屈曲部24が溶接対象の枝管2aや、そのX軸方向の一方に隣接する他の枝管2に干渉する虞を未然に防止した状態で、図1乃至図3の実施の形態における探触子14と同様に、溶接対象の枝管2aのX軸方向の一方の端部位置のタッチセンシングを実施できる。
【0060】
又、上記探触子14aの屈曲部24が水平になるように配置した状態とすることにより、図2(ロ)に示したと同様の上記溶接対象の枝管2aの外周面におけるY軸方向の一方へ最も突出した個所についてのタッチセンシングを、上記水平方向に所要寸法延びる探触子14aの屈曲部24により、より容易に実施することが可能になる。
【0061】
次いで、図6は本発明の実施の更に他の形態を示すもので、図1乃至図3の実施の形態と同様な構成において、枝管検出センサを、探触子14に代えて、耐熱型の光学式又は磁気式の変位センサ25,26としたもので、以下のような構成としてある。
【0062】
すなわち、図1乃至図3と同様の構成において、旋回台13における上記枝管溶接機4の取付位置に対して旋回軸心13aを中心に180度となる方向の側面に、該旋回台13の旋回軸心13aに直交する方向に沿って外方へ所要寸法延びる直線状のセンサ支持ロッド27を設ける。上記センサ支持ロッド27には、途中位置より直角方向の一側へ所要寸法延びるセンサ支持分岐ロッド28を設ける。
【0063】
更に、上記センサ支持ロッド27の先端部の一側部と、上記センサ支持分岐ロッド28におけるセンサ支持ロッド27寄り端部付近に、光学式又は磁気式の一対の変位センサ25を互いに対向させて設ける。これにより、上記センサ支持ロッド27の一側に溶接対象の枝管2aが相対的に近接して、該溶接対象の枝管2aの周方向における上記センサ支持ロッド27に近接する側の端部が、上記対向配置された変位センサ25の間に侵入すると、該変位センサ25により上記溶接対象の枝管2aの存在を検出できるようにしてある。
【0064】
又、上記センサ支持分岐ロッド28における上記旋回台13より離反する方向の側面部と、それに対応する上記センサ支持ロッド27におけるセンサ支持分岐ロッド28取付位置よりも先端寄り部分に、光学式又は磁気式の一対の変位センサ26を互いに対向させて設ける。これにより、上記センサ支持分岐ロッド28に対して旋回台13より離反する方向から、溶接対象の枝管2aが相対的に近接して、該溶接対象の枝管2aの周方向における上記センサ支持分岐ロッド28に近接する側の端部が、上記対向配置された変位センサ26の間に侵入すると、該変位センサ26により上記溶接対象の枝管2aの存在を検出できるようにしてある。
【0065】
更に、図示してないが、上記各センサ25,26による上記溶接対象の枝管2aの検出信号は、図1乃至図3に示した実施の形態のロボットコントローラ19と同様のロボットコントローラ19へ共に入力させるようにして、上記各センサ25,26により溶接対象の枝管2aが検出された時点における該ロボットコントローラ19で制御している多関節ロボットのロボットハンド12の先端部の位置情報と、上記旋回台13にセンサ支持ロッド27及びセンサ支持分岐ロッド28を介して取り付けてある上記各変位センサ25,26の配置等についての既知のデータとを基に、上記溶接対象の枝管2aにおける上記各変位センサ25,26により検出された個所についての位置情報を、たとえば、上記母管1の長手方向となるX軸方向と、それに直角な水平方向であるY軸方向と、上下方向であるZ軸方向についての座標に関して検出できるようにしてある。
【0066】
その他の構成は図1乃至図3に示したものと同様であり、同一のものには同一の符号が付してある。
【0067】
以上の構成としてある本実施の形態の自動溶接装置における溶接トーチの位置決め装置を使用する場合は、旋回台13の旋回操作により上記センサ支持ロッド27をY軸方向に平行に、又、上記センサ支持分岐ロッド28をX軸方向に平行に配置した状態で、所定のZ軸平面内で、上記センサ支持ロッド27を、母管1の長手方向に配列する枝管2の取付位置に関する設計データを基にして、母管1に仮付けしてある溶接対象の枝管2aと、そのX軸方向の一方に隣接する他の枝管2との間に挿入する。この際、上記X軸方向に配列された各枝管2,2aの位置が設計データより大幅に変化していることはなく、一方、上記センサ支持ロッド27は、直線状として、水平方向の幅寸法を上記各枝管2,2aのX軸方向の配列間隔に比して小さくなるようにしてあるため、上記センサ支持ロッド27が上記溶接対象の枝管2aやそのX軸方向の一方に隣接する他の枝管2に接触する虞はない。
【0068】
次いで、多関節ロボットの操作により、上記センサ支持ロッド27をX軸方向の他方へ移動させると、上記変位センサ25により、上記溶接対象の枝管2aの上記所定のZ座標平面内におけるX軸方向の一方の端部が検出されるようになるため、ロボットコントローラ19によりその検出位置についてのX座標を求め、その求められたX座標と、上記設計データより既知となっている上記溶接対象の枝管2aの半径の寸法から、上記所定のZ座標平面内における溶接対象の枝管2aの中心位置のX座標が検出できるようになる。
【0069】
更に、多関節ロボットの操作により、上記センサ支持分岐ロッド28をY軸方向に沿わせて上記溶接対象の枝管2aに近接する方向へ移動させると、上記変位センサ26により、上記所定のZ座標平面内にて、上記溶接対象の枝管2aの外周面におけるY軸方向の一方へ最も突出した個所が検出されるようになるため、ロボットコントローラ19によりその検出位置についてのY座標を求め、その求められたY座標と、上記設計データより既知となっている上記溶接対象の枝管2aの半径の寸法から、上記所定のZ座標平面内における溶接対象の枝管2aの中心位置のY座標が検出できるようになる。
【0070】
以上により、上記所定のZ座標平面内における溶接対象の枝管2aの中心位置のXY座標が明らかとなるため、その後は、該求めた溶接対象の枝管2aの中心位置のXY座標に基づいて、図1乃至図3に示したと同様にして、枝管溶接機4の上記溶接対象の枝管2aに対する位置決めを行わせるようにすることで、図1乃至図3の実施の形態と同様の効果を得ることができる。
【0071】
なお、本発明は、上記実施の形態のみに限定されるものではなく、溶接対象の枝管2aに、枝管溶接機4の馬蹄型ガイド5を外嵌させた後に、溶接トーチ11のワイヤ20を用いたタッチセンシングにより、上記溶接対象の枝管2aと、その下方近傍の母管1との溶接個所に関し、周方向の全周に亘りその詳細な位置情報を得るものとして示したが、図7に示すように、上記馬蹄型ガイド5における溶接トーチ11の円周動作の軌道の周方向の複数個所に対応させて、耐熱型の光学式又は磁気式の変位センサ29を設けてなる構成として、これらの変位センサ29により、上記枝管溶接機4の馬蹄型ガイド5を外嵌させた溶接対象の枝管2aと、その下方近傍の母管1との溶接個所に関する周方向複数個所の詳細な位置情報を得るようにしてもよい。この場合にも、ロボットコントローラ19では、上記周方向の複数個所で検出した位置情報を互いに連係させることで、溶接対象の枝管2aと母管1との実際の溶接個所について、他の枝管2の溶接時の熱により生じた母管1の撓みや歪み、及び、母管1における各枝管2の取付部分に設けてある図示しない孔の精度、更には、上記母管1に仮付けされている溶接対象の枝管2aの傾き等に起因する様々な誤差を含んだ状態で、周方向の全周に亘りその詳細な位置情報を得ることができる。
【0072】
又、枝管溶接機4の馬蹄型ガイド5を外嵌させた後に、溶接トーチ11のワイヤ20を用いたタッチセンシングにより、上記溶接対象の枝管2aと、その下方近傍の母管1との溶接個所に関し、予め周方向の全周に亘りその詳細な位置情報を得て、その位置情報を基に、多関節ロボットにずれ量を補正するためのティーチングを行ってから溶接を行わせるものとして示したが、ずれ量の補正を行いながら溶接を行わせるようにしてもよい。
【0073】
上記溶接対象の枝管2aに、枝管溶接機4の馬蹄型ガイド5を外嵌させた後に、溶接対象の枝管2aと、その下方近傍の母管1との溶接個所に関し、周方向の全周に亘りその詳細な位置情報を得ることが望ましいが、溶接時の熱による母管1の撓みや歪みが小さい場合や、母管1における各枝管2の取付部分に設ける図示しない孔の精度が十分に高い場合等には、上記枝管溶接機4の馬蹄型ガイド5を外嵌させた後に、溶接対象の枝管2aと、その下方近傍の母管1との溶接個所についてのタッチセンシングは省略してもよい。この場合は、溶接トーチ11へ供給するワイヤ20をタッチセンサ16に通電ライン21を介して接続する構成を省略できる。
【0074】
枝管検出センサは、母管1に仮付けされた溶接対象の枝管2aの少なくともX軸方向位置検出を行うことができ、且つ母管1に仮付けされた上記溶接対象の枝管2aとそれに隣接する他の枝管2との間に挿入する部分の水平方向の幅寸法が、母管1に仮付けされる溶接対象の枝管2aとそれに隣接する他の枝管2とのX軸方向の配列間隔に比して十分に小さいか又は小さくできるようにしてあり、更に、枝管溶接機4の馬蹄型ガイド5を溶接対象の枝管2aに対し横方向から外嵌させるときの該馬蹄型ガイド5の進行方向に対し直角な方向よりも前側に突出しない状態として旋回台13に取り付けることができれば、図示した以外の形状としてあってもよく、又、探触子14や変位センサ25,26以外のいかなる検出方式のものを採用してもよい。
【0075】
旋回台13における枝管検出センサの取付位置は、該旋回台13の制御や、溶接対象の枝管2aの位置情報の検出を行う際の演算等の処理を容易なものとするという観点からすると、上記旋回台13における枝管溶接機4の取付位置に対して旋回軸心13aを中心に周方向に90度又は180度又は270度のいずれかの方向に設定することが望ましいが、枝管溶接機4の馬蹄型ガイド5を溶接対象の枝管2aに対し横方向から外嵌させるときの該馬蹄型ガイド5の進行方向に対し直角な方向よりも前側に突出しない状態であれば、上記旋回台13における上記枝管検出センサの取付位置は、自在に変更してもよい。この場合であっても、溶接対象の枝管2aに対して上記枝管溶接機4の馬蹄型ガイド5を外嵌して溶接作業を実施する際、上記枝管検出センサが母管1に既設或いは仮付けされている他の枝管2に干渉する虞を解消することができるという効果が得られる。
【0076】
その他本発明の要旨を逸脱しない範囲内で種々変更を加え得ることは勿論である。
【符号の説明】
【0077】
1 母管
2a 溶接対象の枝管
4 枝管溶接機
5 馬蹄型ガイド(ガイド)
5a 切欠部
11 溶接トーチ
12 ロボットハンド
13 旋回台
13a 旋回軸心
14,14a 探触子(枝管検出センサ)
20 ワイヤ
22 変位センサ
25 変位センサ(枝管検出センサ)
26 変位センサ(枝管検出センサ)
【技術分野】
【0001】
本発明は、母管の円周方向及び長手方向に多数の枝管を溶接するために用いる自動溶接装置における溶接トーチを、母管と枝管との溶接個所に対応させて配置するために用いる自動溶接装置における溶接トーチの位置決め方法及び装置に関するものである。
【背景技術】
【0002】
ボイラ等におけるヘッダ(管寄せ)の1つの形式として、母管の外周面に、円周方向及び長手方向(軸心方向)に複数の枝管を接続した形式のものがある。
【0003】
この種のヘッダを製造する場合、横向きに配置した母管の外周面における周方向の1個所、たとえば、外周面の上端側位置に、該母管の長手方向に所要間隔で配列される複数の枝管を溶接して取り付け、次いで、上記母管を、周方向に所要角度回転させてから、新たに該母管の外周面の上端側となる位置に、長手方向に所要間隔で配列される複数の枝管を溶接して取り付け、以降、上記手順を順次繰り返して行うことで、上記母管の外周面の円周方向及び長手方向に多数の枝管を取り付ける手法が多く用いられている。
【0004】
又、上記横向きに配置した母管の外周面における上端側位置に該母管の長手方向に所要間隔で配列される枝管を取り付けるための溶接作業を、溶接トーチを備えたロボットを用いて自動化できるようにした自動溶接装置が提案されている。
【0005】
上記のような母管に対する枝管の溶接作業について、ロボットを用いて自動化させる場合は、該ロボットに備えた溶接トーチを、枝管と母管との間の溶接個所に対し周方向の全周に沿わせて正確に移動させる必要があるため、ロボットにより枝管と母管との溶接個所を予め検出させて、その検出された溶接個所の位置に応じて溶接トーチによる溶接位置の位置決めを行わせるようにすることが重要となる。
【0006】
そのために、たとえば、ロボットに備えた溶接トーチの先端に設けてあるチップを探触子として、上記母管の長手方向に配列される複数の枝管のうちから選んだ1つの基準枝管と、その近傍の母管の位置をタッチセンシングにより検出し、上記基準枝管についての位置データと、上記母管の長手方向に配列する各枝管の配列ピッチを基に、他の枝管と、該枝管近傍の母管の位置を算出して、溶接トーチによる溶接位置を定める手法が従来提案されている(たとえば、特許文献1参照)。
【0007】
又、ロボットに備えた溶接トーチの近傍に、探触子(触針センサ)を設けて、母管と枝管の溶接を行う際は、予め母管の所定位置に仮付けしてある溶接対象となる枝管について、上記探触子によるタッチセンシングを行い、その検出結果を基に、溶接対象となる枝管を鉛直に配置させ且つ上記ロボットの移動方向が上記母管の軸心方向に対して平行になるようにするための補正量を求めて、該求められた補正量に応じて上記母管の周方向角度と上下方向の傾き、及び、水平面内での位置(角度)を補正させる手法も従来提案されている(たとえば、特許文献2参照)。
【0008】
ところで、本出願人は、上記ヘッダ製造時における母管と枝管との溶接作業を行う際に、通常の溶接トーチではアクセスが困難な狭隘部であっても、枝管の周方向の全周に亘り溶接トーチを移動させながら隅肉溶接を行うことができるようにするために、図8及び図9に示す如き自動溶接装置を従来提案している。
【0009】
これは、図8に示すように、母管1の長手方向に沿って該母管1の長手方向に配列して取り付ける複数の枝管2の取付位置に応じて移動可能に設けた多関節ロボット3の先端側に、枝管溶接機(スタブ管溶接機)4を取り付けた構成としてある。
【0010】
更に、上記枝管溶接機4は、図9に示すように、枝管2を半径方向から挿入して包囲可能な切欠部5aを備えた馬蹄型ガイド5と、上記枝管2を半径方向から挿入して包囲可能な切欠部6aを備え且つ上記馬蹄型ガイド5の下側に該馬蹄型ガイド5の切欠部5aを超えて回転可能に支持された切欠付リングギア6と、上記馬蹄型ガイド5に対し上記リングギア6を相対的に回転駆動させる駆動機構7と、上記リングギア6に固定された該リングギア6と同じ位置に切欠部8aを備えたトーチ取付部材8と、該トーチ取付部材8の下側にスライドガイド10を介して径方向にスライド可能に取り付けたトーチ支持ブロック9と、該トーチ支持ブロック9に下向きに取り付けると共に下端部が上記リングギア6の中心側に向くように取り付けた溶接トーチ11とからなる構成としてある。
【0011】
これにより、上記枝管溶接機4では、上記リングギア6の切欠部6aの位相を、上記馬蹄型ガイド5の切欠部5aの位相に合わせた状態で、上記多関節ロボット3の操作により枝管溶接機4を、母管1の外周面の上端側位置に仮止めしてある枝管2に対し側方より近接させて、該枝管溶接機4の馬蹄型ガイド5及びリングギア6の切欠部5a,6aを、上記枝管2に外嵌させ、これにより、上記リングギア6にトーチ取付部材8、スライドガイド10及びトーチ支持ブロック9を介して取り付けてある上記溶接トーチ11を、上記枝管2と母管1との溶接個所の周方向の1個所に向けて配置できるようにしてある。
【0012】
よって、その後、上記駆動機構7によりリングギア6を駆動させると、該リングギア6と一緒に上記溶接トーチ11は、上記枝管2の周りで、上記馬蹄型ガイド5の切欠部5aを越えて周回動作させられるようにしてある。
【0013】
したがって、この周回動作する溶接トーチ11により、上記馬蹄型ガイド5の内側に配置させている枝管2とその下方の母管1との溶接個所は、周方向の全周に亘って溶接できるようにしてある。
【0014】
なお、上記図8及び図9に示した自動溶接装置において、上記枝管2と母管1との溶接個所に対する溶接トーチ11の位置決め精度を高めるためには、枝管2に対する馬蹄型ガイド5の軸心ずれ及び傾きを調整する必要がある。
【0015】
そこで、上記馬蹄型ガイド5の切欠部5aのU字状開口を挟んだ先端部に、互いに対抗する光学センサ、又は、探触子を取り付けて、上記枝管2の位置や該馬蹄型ガイド5に対する相対的な傾きを検出し、該検出された枝管2の位置や相対的な傾きに応じて上記馬蹄型ガイド5の配置を調整させるようにすることが提案されている(たとえば、特許文献3参照)。
【先行技術文献】
【特許文献】
【0016】
【特許文献1】特許第3385390号公報
【特許文献2】特公平4−31748号公報
【特許文献3】特開平10−193112号公報
【発明の概要】
【発明が解決しようとする課題】
【0017】
ところが、特許文献1に示されたように、基準枝管についてのみタッチセンシングによる位置検出を行い、該基準枝管の位置データからその他の枝管の位置を算出する手法では、基準枝管以外の個々の枝管のずれや母管の歪み等による誤差が考慮されない。
【0018】
しかし、実際には、枝管の溶接時の熱の影響により母管自体が撓んだり、歪んだりすることがあり、又、上記母管における枝管取り付け部分には、該枝管に連通させるための孔が設けてあるが、この孔自体の精度によっても誤差が生じるため、基準枝管以外の枝管については、母管との溶接個所に対して、溶接トーチを正確に配置できなくなる可能性がある。
【0019】
特許文献2に示されたように、母管に仮付けされた枝管の位置をタッチセンシングにより検出し、その検出結果に応じて母管側を動かすことで枝管の位置の補正を実施する手法では、母管が大型になると、該母管を移動させる大掛かりな位置決め装置が必要になるという問題が生じてしまう。
【0020】
なお、特許文献3に示された自動溶接装置における枝管溶接機4の馬蹄型ガイド5の先端部に、光学センサ又は探触子を取り付けて、枝管2の位置や馬蹄型ガイド5に対する相対的な傾きを検出する手法は、該検出された枝管2の位置や相対的な傾きに応じて上記馬蹄型ガイド5の配置を調整することができて、各枝管2と母管1との溶接個所に対し上記枝管溶接機4の溶接トーチ11を正確に配置するのに有効である。
【0021】
ところで、近年、ヘッダとして、母管1の周方向及び長手方向に枝管2を密に配置した構成のヘッダが求められることがあり、この場合は、上記母管1に取り付ける枝管2の隣接するもの同士の間隔が狭くなる。そのため、上記馬蹄型ガイド5を溶接対象となる枝管2に外嵌させる際には、該馬蹄型ガイド5の切欠部5aのU字状開口を挟んだ2つの先端部を、溶接対象となる枝管2と、その両側に隣接する枝管2との間の狭い隙間へ正確に差し込む必要が生じる。
【0022】
この場合は、上記馬蹄型ガイド5を溶接対象となる枝管2に外嵌させる以前に、該溶接対象となる枝管2の位置や馬蹄型ガイド5との相対的な傾きを検出することが望まれるようになるが、馬蹄型ガイド5の先端部に設ける光学センサでは、該馬蹄型ガイド5を外嵌させる以前の枝管2の位置の検出は難しいと考えられる。
【0023】
一方、馬蹄型ガイド5の先端部に探触子を設けた場合は、馬蹄型ガイド5を外嵌させる前に溶接対象となる枝管2の位置を検出することは可能であるが、たとえば、母管1の周方向に関する枝管2の取付位置が、母管1の長手方向にずれている場合は、上記馬蹄型ガイド5を溶接対象となる枝管2に対して外嵌させるときに、該馬蹄型ガイド5の先端部の上記探触子が、母管1に既に取り付けられている他の枝管2に干渉する虞が生じることが考えられる。
【0024】
そこで、本発明は、上記特許文献3に示された自動溶接装置を更に発展させて、母管の周方向及び長手方向に枝管を密に配置する場合であっても、枝管溶接機の馬蹄型ガイドを溶接対象となる枝管に外嵌させる前に、該溶接対象となる枝管の位置を検出することができて、上記馬蹄型ガイドを上記溶接対象となる枝管に正確に外嵌させることができ、上記枝管溶接機の円周動作する溶接トーチの円周軌道の中央に、上記溶接対象となる枝管を正確に配置できて、上記溶接トーチを、該溶接対象となる枝管と母管との溶接個所の周方向の全周に沿って移動可能に配置できるようにするための自動溶接装置における溶接トーチの位置決め方法及び装置を提供しようとするものである。
【課題を解決するための手段】
【0025】
本発明は、上記課題を解決するために、請求項1に対応して、ロボットのロボットハンドの先端部に設けた旋回台の旋回軸心と直交する方向の側面における溶接対象の枝管に外嵌させるための切欠部を有するガイドと、該ガイドに保持され且つ上記切欠部を超えて円周動作できるようにしてある溶接トーチとを備えてなる枝管溶接機の取付位置に対して、上記旋回台の旋回軸心を中心として90度以上、270度以下の範囲に収まるように設けた枝管検出センサを、母管に仮付けされた溶接対象の枝管に向けて配置して、該枝管検出センサにより上記溶接対象の枝管の母管長手方向に関する位置を検出し、次いで、上記旋回台の旋回により上記溶接対象の枝管に向けた上記枝管溶接機のガイドを、上記溶接対象の枝管に対し母管の長手方向に直交する水平方向の片側に配置した後、該枝管溶接機を、母管の長手方向に直交する水平方向に沿って移動させて、上記ガイドを上記溶接対象の枝管に外嵌させるようにする自動溶接装置における溶接トーチの位置決め方法とする。
【0026】
又、上記構成において、枝管溶接機のガイドを溶接対象の枝管に外嵌させた後、上記枝管溶接機の円周動作する溶接トーチを、上記溶接対象の枝管の周りを移動させると共に、周方向の複数個所で、該溶接トーチのワイヤを探触子として、上記溶接対象の枝管の位置と、その下方近傍に位置する母管との溶接個所のタッチセンシングを行い、得られた位置情報を周方向に連係させて上記溶接個所の周方向の全周に亘りその詳細な位置情報を得て、その位置情報を基に、上記ロボットによる溶接トーチのずれ量を補正させるようにする。
【0027】
更に、上記各構成において、枝管検出センサにより、母管に仮付けされた溶接対象の枝管の上記母管の長手方向に関する位置に加えて、上記溶接対象の枝管の母管の長手方向に直交する水平方向の位置を検出し、枝管溶接機を、母管の長手方向に直交する水平方向に沿って移動させて、上記ガイドを上記溶接対象の枝管に外嵌させるときに、該溶接対象の枝管が、上記枝管溶接機の溶接トーチの円周動作する軌道の中央に配置される位置で枝管溶接機を停止させるようにする。
【0028】
同様に、上記各構成において、枝管溶接機を、母管の長手方向に直交する水平方向に沿って移動させて、ガイドを上記溶接対象の枝管に外嵌させるときに、上記ガイドにおける切欠部の奥側端部に設けた変位センサにより検出される溶接対象の枝管が、上記枝管溶接機の溶接トーチの円周動作する軌道の中央に配置される位置で枝管溶接機を停止させるようにする。
【0029】
又、請求項5に対応して、ロボットにより溶接対象の枝管に外嵌させるための切欠部を有するガイドと、該ガイドに保持され且つ上記切欠部を超えて円周動作できるようにしてある溶接トーチとを備えてなる枝管溶接機を操作できるようにしてある自動溶接装置におけるロボットのロボットハンドの先端部に旋回台を設けて、該旋回台の旋回軸心と直交する方向の側面に、上記枝管溶接機を取り付け、更に、上記旋回台における上記枝管溶接機の取付位置に対して、該旋回台の旋回軸心を中心として90度以上、270度以下の範囲に収まるように、母管に仮付けされた溶接対象の枝管について少なくとも母管の長手方向に関する位置を検出するための枝管検出センサを設けてなる構成を有する自動溶接装置における溶接トーチの位置決め装置とする。
【発明の効果】
【0030】
本発明によれば、以下のような優れた効果を発揮する。
(1)ロボットのロボットハンドの先端部に設けた旋回台の旋回軸心と直交する方向の側面における溶接対象の枝管に外嵌させるための切欠部を有するガイドと、該ガイドに保持され且つ上記切欠部を超えて円周動作できるようにしてある溶接トーチとを備えてなる枝管溶接機の取付位置に対して、上記旋回台の旋回軸心を中心として90度以上、270度以下の範囲に収まるように設けた枝管検出センサを、母管に仮付けされた溶接対象の枝管に向けて配置して、該枝管検出センサにより上記溶接対象の枝管の母管長手方向に関する位置を検出し、次いで、上記旋回台の旋回により上記溶接対象の枝管に向けた上記枝管溶接機のガイドを、上記溶接対象の枝管に対し母管の長手方向に直交する水平方向の片側に配置した後、該枝管溶接機を、母管の長手方向に直交する水平方向に沿って移動させて、上記ガイドを上記溶接対象の枝管に外嵌させるようにする自動溶接装置における溶接トーチの位置決め方法、及び、ロボットにより溶接対象の枝管に外嵌させるための切欠部を有するガイドと、該ガイドに保持され且つ上記切欠部を超えて円周動作できるようにしてある溶接トーチとを備えてなる枝管溶接機を操作できるようにしてある自動溶接装置におけるロボットのロボットハンドの先端部に旋回台を設けて、該旋回台の旋回軸心と直交する方向の側面に、上記枝管溶接機を取り付け、更に、上記旋回台における上記枝管溶接機の取付位置に対して、該旋回台の旋回軸心を中心として90度以上、270度以下の範囲に収まるように、母管に仮付けされた溶接対象の枝管について少なくとも母管の長手方向に関する位置を検出するための枝管検出センサを設けてなる構成を有する自動溶接装置における溶接トーチの位置決め装置としてあるので、母管の周方向及び長手方向に枝管を密に配置して接続した構成のヘッダを製造する場合のように、上記母管に取り付ける枝管の隣接するもの同士の間隔が狭くなる場合であっても、ロボットのロボットハンドに旋回台を介して取り付けてある枝管溶接機のガイドを、母管の長手方向に沿って仮付けされた複数の枝管のうちの溶接対象となる枝管に正確に外嵌させることができる。
(2)更に、このガイドの溶接対象の枝管に対する外嵌の際に、該ガイドが溶接対象の枝管や、母管に既設又は仮付けされた他の枝管に対して干渉する虞を解消することができる。
【図面の簡単な説明】
【0031】
【図1】本発明の自動溶接装置における溶接トーチの位置決め装置の実施の一形態を示す概要図である。
【図2】図1の装置により溶接トーチの位置決めを実施する手順を示すもので、(イ)は探触子による溶接対象となる枝管の前後方向位置のタッチセンシングを行う状態を、(ロ)は探触子による溶接対象となる枝管の左右方向位置のタッチセンシングを行う状態をそれぞれ示す概要図である。
【図3】図1の装置により溶接トーチの位置決めを実施する手順として、図2(ロ)に続く手順を示すもので、枝管溶接機の馬蹄型ガイドを外嵌させた枝管に対して溶接トーチのワイヤによるタッチセンシングを行う状態を示す概要図である。
【図4】本発明の実施の他の形態として、図1の装置における探触子の別の例を示す概要図である。
【図5】本発明の実施の更に他の形態として、図1の装置の応用例として、溶接対象となる枝管の前後方向位置を検出するための距離センサを備えた構成を示す概要図である。
【図6】本発明の実施の更に他の形態として、溶接対象となる枝管の前後方向位置及び左右方向位置を検出するための変位センサを備えた構成を示す概要図である。
【図7】本発明の実施の更に他の形態として、溶接対象となる枝管の前後方向位置及び左右方向位置を検出するための変位センサと、馬蹄型ガイドを外嵌させた枝管の位置をセンシングする変位センサを備えた構成を示す概要図である。
【図8】従来の枝管溶接用の自動溶接装置を示す概略斜視図である。
【図9】図8の自動溶接装置における枝管溶接機を拡大して示す平面図である。
【発明を実施するための形態】
【0032】
以下、本発明を実施するための形態を図面を参照して説明する。
【0033】
図1乃至図3は本発明の自動溶接装置における溶接トーチの位置決め方法及び装置の実施の一形態を示すもので、以下のようにしてある。
【0034】
すなわち、図1は、本発明の自動溶接装置における溶接トーチの位置決め装置を示すもので、母管1の長手方向に沿って図示しない移動機構により移動可能に設けた多関節ロボットにおけるロボットハンド12の先端部に、旋回台13を旋回可能に設ける。
【0035】
上記旋回台13の旋回軸心13aと直交する方向に位置する旋回台13の側面の所要個所に、図8及び図9に示した自動溶接装置における枝管溶接機4と同様に、ガイドとしての馬蹄型ガイド5と、該馬蹄型ガイド5に保持された状態でリングギア6(図9参照)と共に円周動作可能な溶接トーチ11を備えてなる枝管溶接機4を取り付ける。なお、図1では、図示する便宜上、上記多関節ロボットのロボットハンド12の先端部以外の部分、及び、上記枝管溶接機4における馬蹄型ガイド5と溶接トーチ11以外の構成の記載は省略してある。又、図中の一点鎖線で描く円弧は、上記溶接トーチ11の円周動作の軌道の概要を示すものである(後述の図2(イ)(ロ)乃至図7も同様)。
【0036】
更に、上記旋回台13において、上記枝管溶接機4の馬蹄型ガイド5を母管1に仮付けされた溶接対象の枝管2aに対して横方向から外嵌させるときに上記母管1に既設又は仮付けされている他の枝管2と干渉しない方向、具体的には、上記旋回台13の旋回軸心13aを中心として上記枝管溶接機4の取付位置の方向を0度とした場合に周方向に90度以上且つ270度以下となる角度範囲の方向の側面に、枝管検出センサとして、該旋回台13の旋回軸心13aに直交する方向に沿って外方へ所要寸法延びる直線状の探触子14を、取付部材15を介して取り付ける。これにより、上記枝管溶接機4の馬蹄型ガイド5を溶接対象の枝管2aに対し横方向から外嵌させるときには、上記探触子14が、該馬蹄型ガイド5の進行方向に対し直角な方向よりも前側に突出配置されないようにしてあり、溶接対象の枝管2aに対して上記枝管溶接機4の馬蹄型ガイド5を外嵌させて溶接作業を実施する際、上記探触子14が母管1に既設或いは仮付けされている他の枝管2に干渉することがないようにしてある。
【0037】
なお、上記旋回台13の制御や、後述する溶接対象の枝管2aにおける上記探触子14が接触する個所の位置情報の検出を行う際の演算等の処理を容易なものとするという観点からすると、上記旋回台13における上記探触子14の取付位置は、上記枝管溶接機4の取付位置に対して旋回軸心13aを中心に周方向に90度又は180度又は270度となる方向に設定することが望ましい。図では上記旋回台13における上記枝管溶接機4の取付位置に対して旋回軸心13aを中心に180度となる方向の側面に探触子14を取り付けた構成が示してある。
【0038】
上記探触子14には、通電検出式のタッチセンサ16の一方の電極(図では正極)16aを、通電ライン17を介して接続すると共に、該タッチセンサ16の他方の電極(図では負極)16bに一端部を接続した通電ライン18の他端部を、上記母管1に接続する。更に、上記タッチセンサ16による接触検出信号を、上記多関節ロボットの制御(上記旋回台13の旋回や上記枝管溶接機4における溶接トーチ11の円周動作の制御も含む)を行うためのロボットコントローラ19に入力できるようにする。これにより、上記探触子14が上記母管1に仮付けしてある溶接対象の枝管2aに接触すると、その時点で、上記タッチセンサ16により両者の接触を通電により検出できるようにしてある。更に、この接触検出信号が入力される上記ロボットコントローラ19により、該ロボットコントローラ19で制御している上記多関節ロボットのロボットハンド12の先端部の位置情報と、上記旋回台13に取り付けてある上記探触子14の形状(長さ)等についての既知のデータとを基に、上記溶接対象の枝管2aにおける上記探触子14が接触した個所についての位置情報を、たとえば、上記母管1の長手方向となるX軸方向と、それに直角な水平方向であるY軸方向と、上下方向であるZ軸方向についての座標に関して検出できるようにしてある。
【0039】
更に、必要に応じて、上記枝管溶接機4の溶接トーチ11に供給するワイヤ20に、上記タッチセンサ16の一方の電極16aを、通電ライン21を介し接続した構成としてもよい。かかる構成とすれば、後述するように、上記枝管溶接機4の馬蹄型ガイド5を母管1に仮付けしてある溶接対象の枝管2aに外嵌させた状態で、上記溶接トーチ11のワイヤ20を探触子として、上記溶接対象の枝管2aや、その下方近傍に位置する母管1との接触を検出できる。よって、上記した探触子14の場合と同様に、上記ロボットコントローラ19により、該ロボットコントローラ19で制御している上記ロボットハンド12の先端部の位置情報と、上記旋回台13に取り付けてある枝管溶接機4における上記溶接トーチ11の円周動作位置の情報と、該枝管溶接機4の形状及びワイヤ20の突出量についての既知のデータとを基に、上記溶接対象の枝管2aや母管1における溶接トーチ11のワイヤ20が接触した個所の位置情報を、XYZの3軸方向についての座標に関して検出できるようにしてある。
【0040】
以上の構成としてある本発明の自動溶接装置における溶接トーチの位置決め装置を用いて溶接トーチの位置決めを実施する場合は、先ず、母管1の寸法、枝管2の寸法、上記母管1に対し接続する枝管2の配置等に関する既知のデータ、たとえば、設計データを基に、上記多関節ロボットを操作して、ロボットハンド12の先端部の上記旋回台13を、母管1に仮付けした溶接対象の枝管2aに対し上記枝管溶接機4の馬蹄型ガイド5を外嵌させるときの高さ位置に対応する所定のZ座標平面内に、母管1よりY軸方向の一方へ所要寸法離して配置させる。又、この状態で、上記旋回台13の旋回操作により、上記探触子14を、母管1側へ向けてY軸方向に平行に配置させておく。
【0041】
次に、上記母管1の長手方向(X軸方向)の枝管2,2aの接続個所に関する設計データを基に、上記多関節ロボットを操作して、上記探触子14を、図2(イ)に二点鎖線で示すように、溶接対象の枝管2aと、そのX軸方向の一方に隣接する他の枝管2との間に挿入する。この際、上記X軸方向に配列された各枝管2,2aの位置が設計データより大幅に変化していることはなく、一方、上記探触子14は直線状として、水平方向の幅寸法を上記各枝管2,2aのX軸方向の配列間隔に比して大幅に小さくなるようにしてあるため、上記探触子14が上記溶接対象の枝管2aやそのX軸方向の一方に隣接する他の枝管2に接触する虞はない。
【0042】
次いで、図2(イ)に矢印aで示すように、上記多関節ロボットの操作により、上記探触子14を溶接対象の枝管2aの側面に近接する方向へ移動させる。この移動に伴って、図2(イ)に実線で示すように、上記探触子14が上記溶接対象の枝管2aの側面に接触すると、通電開始に基づいてタッチセンサ16により両者の接触が検出される。よって、その接触検出信号が入力されるロボットコントローラ19では、上記溶接対象の枝管2aにおける上記探触子14が接触した個所、すなわち、溶接対象の枝管2aの上記所定のZ座標平面内におけるX軸方向の一方の端部位置についてのX座標が求まる。よって、その求められたX座標と、上記設計データより既知となっている上記溶接対象の枝管2aの半径の寸法から、上記所定のZ座標平面内における溶接対象の枝管2aの中心位置のX座標が検出できるため、その値を上記ロボットコントローラ19に一時記憶させる。
【0043】
上記のようにして所定のZ座標平面内における溶接対象の枝管2aの中心位置のX座標が判明すると、上記ロボットコントローラ19は、多関節ロボットを操作して、上記探触子14を、上記溶接対象の枝管2aとそのX軸方向の一方に隣接する他の枝管2との間からY軸方向の一方(溶接対象の枝管2aから離れる方向)へ一旦引き出し、その後、Y軸方向に平行な配置としてある該探触子14を、上記所定のZ座標平面内で、上記溶接対象の枝管2aの中心位置のX座標と同一のX座標位置に配置させる。
【0044】
次いで、上記多関節ロボットの操作により、上記探触子14を、Y軸方向の他方(溶接対象の枝管2aに接近する方向)へ移動させる。この移動に伴い、図2(ロ)に示すように、上記探触子14の先端部が溶接対象の枝管2aの外周面に接触すると、タッチセンサ16より両者の接触検出信号が上記ロボットコントローラ19へ入力されるため、該ロボットコントローラ19では、上記溶接対象の枝管2aにおける上記探触子14が接触した個所、すなわち、上記所定のZ座標平面内にて、上記溶接対象の枝管2aの外周面におけるY軸方向の一方へ最も突出した個所についての、少なくともY座標を検出し、その値と、上記溶接対象の枝管2aの既知の半径寸法から、上記所定のZ座標平面内における溶接対象の枝管2aの中心位置のY座標を検出して、一時記憶する。これにより、上記所定のZ座標平面内における溶接対象の枝管2aの中心位置のXY座標が明らかとなる。
【0045】
上記のようにして探触子14を用いたタッチセンシングにより上記所定のZ座標平面内における上記溶接対象の枝管2aの中心位置のXY座標の検出が終了すると、上記ロボットコントローラ19は、多関節ロボットを操作して、上記探触子14を上記溶接対象の枝管2aの外周面よりY軸方向の一方へ所要寸法離反させた後、上記旋回台13を180度旋回させて、図1に示すように、上記枝管溶接機4を、馬蹄型ガイド5の切欠部5aがY軸方向に沿って上記溶接対象の枝管2aに臨むように配置する。更に、この際、上記枝管溶接機4における溶接トーチ11の円周動作の中心位置のX座標を、上記検出して記憶してある溶接対象の枝管2aの中心位置のX座標と一致させるようにする。
【0046】
その後、上記ロボットコントローラ19は、多関節ロボットの操作により、上記枝管溶接機4を、上記所定のZ座標平面内でY軸方向の他方へ移動させて、図3に示すように、該枝管溶接機4の馬蹄型ガイド5を、上記溶接対象の枝管2aに外嵌させると共に、該枝管溶接機4における上記溶接トーチ11の円周動作の中心位置のY座標が、上記記憶してある溶接対象の枝管2aの中心位置のY座標と一致する位置で停止させる。これにより、上記溶接対象の枝管2aを、上記枝管溶接機4の溶接トーチ11の円周動作の軌道の中央に正確に配置させることができるようになる。又、上記枝管溶接機4の馬蹄型ガイド5を上記溶接対象の枝管2aに外嵌させるときには、上記所定のZ座標平面内で、上記枝管溶接機4における溶接トーチ11の円周動作の中心位置のX座標と、上記予め計測した溶接対象の枝管2aの中心位置のX座標を一致させた状態としてから、該枝管溶接機4の馬蹄型ガイド5をY軸方向の他方へのみ移動させればよいため、該枝管溶接機4の馬蹄型ガイド5が、上記溶接対象の枝管2aや、母管1に既設又は仮付けしてある他の枝管2に干渉する虞はない。
【0047】
上記のようにして溶接対象の枝管2aに、上記枝管溶接機4の馬蹄型ガイド5を外嵌させると、上記ロボットコントローラ19は、該枝管溶接機4の溶接トーチ11を、上記溶接対象の枝管2aの周りで円周動作させると共に、周方向の複数個所で、溶接トーチ11のワイヤ20を探触子として、上記溶接対象の枝管2aの下端部や、その下方近傍に位置する母管1と接触させるようにして、タッチセンサ16によりそれぞれの個所での通電を基に接触が検出された時点での上記溶接トーチ11のワイヤ20の位置から、上記溶接対象の枝管2aや母管1における溶接トーチ11のワイヤ20が接触した個所について、それぞれXYZの3軸方向の座標を検出するようにする。これにより、上記ロボットコントローラ19では、周方向の複数個所で検出した位置情報を互いに連係させることで、溶接対象の枝管2aと母管1との実際の溶接個所、すなわち、他の枝管2の溶接時の熱により生じた母管1の撓みや歪み、及び、母管1における各枝管2の取付部分に設けてある図示しない孔の精度、更には、上記母管1に仮付けされている溶接対象の枝管2aの傾き等に起因する様々な誤差を含んだ状態の実際の溶接個所について、周方向の全周に亘りその詳細な位置情報を得ることができる。
【0048】
よって、上記ロボットコントローラ19では、上記溶接対象の枝管2aと母管1との実際の溶接個所について得られた詳細な位置情報を基に、上記多関節ロボットへずれ量を補正するためのティーチングを行う。これにより、その後は、上記ティーチングされた多関節ロボットの操作によって、上記溶接トーチ11を上記溶接対象の枝管2aの周りで円周動作させながら、該溶接トーチ11の位置を、上記溶接対象の枝管2aと母管1との実際の溶接個所に対応して調整できるようになる。したがって、上記溶接トーチ11により、上記溶接対象の枝管2aと母管1との溶接個所を、周方向の全周に亘り適切な溶接(隅肉溶接)を実施することができるようになる。
【0049】
したがって、上記母管1に仮付けされた各枝管2について、上記と同様の手順を順次繰り返して実施することにより、上記各枝管2を母管1に順次溶接するときには、個々の枝管2とその下方近傍に位置する母管1との実際の溶接個所を個別に検出できるため、上記枝管溶接機4の円周動作する溶接トーチ11を、各枝管2ごとに個別に検出した実際の溶接個所に対応させて位置調整を行わせるようにすればよい。
【0050】
このように、本発明の自動溶接装置における溶接トーチの位置決め方法及び装置によれば、母管1の周方向及び長手方向に枝管2を密に配置した構成のヘッダを製造するために、上記母管1に取り付ける枝管2の隣接するもの同士の間隔が狭くなる場合であっても、多関節ロボットのロボットハンド12に旋回台13を介して取り付けてある枝管溶接機4の馬蹄型ガイド5を、母管1の長手方向に沿って仮付けされた複数の枝管2のうちの溶接対象となる枝管2aに正確に外嵌させることができる。又、この馬蹄型ガイド5の溶接対象の枝管2aに対する外嵌の際に、該馬蹄型ガイド5が溶接対象の枝管2aや、母管1に既設又は仮付けされた他の枝管2に対して干渉する虞は解消することができる。
【0051】
上記実施の形態においては、母管1に仮付けされた溶接対象の枝管2aに対して枝管溶接機4の馬蹄型ガイド5を外嵌させる以前に、予め、探触子14を用いたタッチセンシングを基に、上記溶接対象の枝管2aに中心位置について上記所定のZ座標平面内におけるXY座標を求めるものとして示した。しかし、上記馬蹄型ガイド5をY軸方向に沿って移動させて、該馬蹄型ガイド5の切欠部5a(図9参照)のU字状開口を挟んだ2つの先端部を、溶接対象の枝管2と、その両側に隣接する枝管2との間の隙間へ正確に差し込むという作業自体は、上記母管1に仮付けされた溶接対象の枝管2aの上記所定のZ座標平面内におけるX座標さえ判明していれば実施可能となる。
【0052】
この点に鑑みて、図4に示すように、上記枝管溶接機4の馬蹄型ガイド5における切欠部5a(図9参照)の奥側の端部の上側に、耐熱型の光学式又は磁気式の変位センサ22を設けてなる構成としてもよい。
【0053】
その他の構成は図1乃至図3に示したものと同様であり、同一のものには同一の符号が付してある。
【0054】
かかる構成とする場合は、上記探触子14では、図2(イ)に示したと同様の上記溶接対象の枝管2aに中心位置について上記所定のZ座標平面内におけるX座標を検出するためのタッチセンシングのみを行うようにし、次いで、該検出された溶接対象の枝管2aの上記所定のZ座標平面内におけるX座標を基に、上記枝管溶接機4を、溶接トーチ11の円周動作の中心位置のX座標を、上記検出して記憶してある溶接対象の枝管2aの中心位置のX座標と一致させた状態で、馬蹄型ガイド5の切欠部5aがY軸方向に沿って上記溶接対象の枝管2aに臨むように配置し、その後、上記枝管溶接機4をY軸方向に沿って移動させて、その馬蹄型ガイド5を、上記溶接対象の枝管2aに外嵌させると、該溶接対象の枝管2aの近接が上記馬蹄型ガイドの切欠部5a(図9参照)の奥側端部に設けてある上記変位センサ22により検出されるようになるため、該枝管溶接機4における上記溶接トーチ11の円周動作の中心位置のY座標が、上記変位センサ22で検出される溶接対象の枝管2aの中心位置と一致する時点で、上記枝管溶接機4をY軸方向の移動を停止させるようにすれば、上記溶接対象の枝管2aを、上記枝管溶接機4の溶接トーチ11の円周動作の軌道の中央に正確に配置させることができるようになる。
【0055】
したがって、この構成としても図1乃至図3の実施の形態と同様の効果を得ることができる。
【0056】
次に、図5は本発明の実施の他の形態として、図1乃至図3の実施の形態における探触子14の変形例を示すものである。
【0057】
すなわち、本実施の形態では、探触子を、旋回台13の旋回軸心13aに直交する方向に沿って外方へ所要寸法延びる直線部23と、該直線部23の先端より直角方向に所要寸法延びる屈曲部24とからなる構成の探触子14aとする。
【0058】
その他の構成は図1乃至図3に示したものと同様であり、同一のものには同一の符号が付してある。
【0059】
以上の構成としてある本実施の形態の自動溶接装置における溶接トーチの位置決め装置を使用する場合は、上記探触子14aを、図2(イ)に示したと同様に、母管1に仮付けしてある溶接対象の枝管2aと、そのX軸方向の一方に隣接する他の枝管2との間に挿入するとき、及び、上記各枝管2aと2の間より引き出すときには、多関節ロボットの操作により上記探触子14の屈曲部24が上下方向の配置となるようにすれば、該屈曲部24が溶接対象の枝管2aや、そのX軸方向の一方に隣接する他の枝管2に干渉する虞を未然に防止した状態で、図1乃至図3の実施の形態における探触子14と同様に、溶接対象の枝管2aのX軸方向の一方の端部位置のタッチセンシングを実施できる。
【0060】
又、上記探触子14aの屈曲部24が水平になるように配置した状態とすることにより、図2(ロ)に示したと同様の上記溶接対象の枝管2aの外周面におけるY軸方向の一方へ最も突出した個所についてのタッチセンシングを、上記水平方向に所要寸法延びる探触子14aの屈曲部24により、より容易に実施することが可能になる。
【0061】
次いで、図6は本発明の実施の更に他の形態を示すもので、図1乃至図3の実施の形態と同様な構成において、枝管検出センサを、探触子14に代えて、耐熱型の光学式又は磁気式の変位センサ25,26としたもので、以下のような構成としてある。
【0062】
すなわち、図1乃至図3と同様の構成において、旋回台13における上記枝管溶接機4の取付位置に対して旋回軸心13aを中心に180度となる方向の側面に、該旋回台13の旋回軸心13aに直交する方向に沿って外方へ所要寸法延びる直線状のセンサ支持ロッド27を設ける。上記センサ支持ロッド27には、途中位置より直角方向の一側へ所要寸法延びるセンサ支持分岐ロッド28を設ける。
【0063】
更に、上記センサ支持ロッド27の先端部の一側部と、上記センサ支持分岐ロッド28におけるセンサ支持ロッド27寄り端部付近に、光学式又は磁気式の一対の変位センサ25を互いに対向させて設ける。これにより、上記センサ支持ロッド27の一側に溶接対象の枝管2aが相対的に近接して、該溶接対象の枝管2aの周方向における上記センサ支持ロッド27に近接する側の端部が、上記対向配置された変位センサ25の間に侵入すると、該変位センサ25により上記溶接対象の枝管2aの存在を検出できるようにしてある。
【0064】
又、上記センサ支持分岐ロッド28における上記旋回台13より離反する方向の側面部と、それに対応する上記センサ支持ロッド27におけるセンサ支持分岐ロッド28取付位置よりも先端寄り部分に、光学式又は磁気式の一対の変位センサ26を互いに対向させて設ける。これにより、上記センサ支持分岐ロッド28に対して旋回台13より離反する方向から、溶接対象の枝管2aが相対的に近接して、該溶接対象の枝管2aの周方向における上記センサ支持分岐ロッド28に近接する側の端部が、上記対向配置された変位センサ26の間に侵入すると、該変位センサ26により上記溶接対象の枝管2aの存在を検出できるようにしてある。
【0065】
更に、図示してないが、上記各センサ25,26による上記溶接対象の枝管2aの検出信号は、図1乃至図3に示した実施の形態のロボットコントローラ19と同様のロボットコントローラ19へ共に入力させるようにして、上記各センサ25,26により溶接対象の枝管2aが検出された時点における該ロボットコントローラ19で制御している多関節ロボットのロボットハンド12の先端部の位置情報と、上記旋回台13にセンサ支持ロッド27及びセンサ支持分岐ロッド28を介して取り付けてある上記各変位センサ25,26の配置等についての既知のデータとを基に、上記溶接対象の枝管2aにおける上記各変位センサ25,26により検出された個所についての位置情報を、たとえば、上記母管1の長手方向となるX軸方向と、それに直角な水平方向であるY軸方向と、上下方向であるZ軸方向についての座標に関して検出できるようにしてある。
【0066】
その他の構成は図1乃至図3に示したものと同様であり、同一のものには同一の符号が付してある。
【0067】
以上の構成としてある本実施の形態の自動溶接装置における溶接トーチの位置決め装置を使用する場合は、旋回台13の旋回操作により上記センサ支持ロッド27をY軸方向に平行に、又、上記センサ支持分岐ロッド28をX軸方向に平行に配置した状態で、所定のZ軸平面内で、上記センサ支持ロッド27を、母管1の長手方向に配列する枝管2の取付位置に関する設計データを基にして、母管1に仮付けしてある溶接対象の枝管2aと、そのX軸方向の一方に隣接する他の枝管2との間に挿入する。この際、上記X軸方向に配列された各枝管2,2aの位置が設計データより大幅に変化していることはなく、一方、上記センサ支持ロッド27は、直線状として、水平方向の幅寸法を上記各枝管2,2aのX軸方向の配列間隔に比して小さくなるようにしてあるため、上記センサ支持ロッド27が上記溶接対象の枝管2aやそのX軸方向の一方に隣接する他の枝管2に接触する虞はない。
【0068】
次いで、多関節ロボットの操作により、上記センサ支持ロッド27をX軸方向の他方へ移動させると、上記変位センサ25により、上記溶接対象の枝管2aの上記所定のZ座標平面内におけるX軸方向の一方の端部が検出されるようになるため、ロボットコントローラ19によりその検出位置についてのX座標を求め、その求められたX座標と、上記設計データより既知となっている上記溶接対象の枝管2aの半径の寸法から、上記所定のZ座標平面内における溶接対象の枝管2aの中心位置のX座標が検出できるようになる。
【0069】
更に、多関節ロボットの操作により、上記センサ支持分岐ロッド28をY軸方向に沿わせて上記溶接対象の枝管2aに近接する方向へ移動させると、上記変位センサ26により、上記所定のZ座標平面内にて、上記溶接対象の枝管2aの外周面におけるY軸方向の一方へ最も突出した個所が検出されるようになるため、ロボットコントローラ19によりその検出位置についてのY座標を求め、その求められたY座標と、上記設計データより既知となっている上記溶接対象の枝管2aの半径の寸法から、上記所定のZ座標平面内における溶接対象の枝管2aの中心位置のY座標が検出できるようになる。
【0070】
以上により、上記所定のZ座標平面内における溶接対象の枝管2aの中心位置のXY座標が明らかとなるため、その後は、該求めた溶接対象の枝管2aの中心位置のXY座標に基づいて、図1乃至図3に示したと同様にして、枝管溶接機4の上記溶接対象の枝管2aに対する位置決めを行わせるようにすることで、図1乃至図3の実施の形態と同様の効果を得ることができる。
【0071】
なお、本発明は、上記実施の形態のみに限定されるものではなく、溶接対象の枝管2aに、枝管溶接機4の馬蹄型ガイド5を外嵌させた後に、溶接トーチ11のワイヤ20を用いたタッチセンシングにより、上記溶接対象の枝管2aと、その下方近傍の母管1との溶接個所に関し、周方向の全周に亘りその詳細な位置情報を得るものとして示したが、図7に示すように、上記馬蹄型ガイド5における溶接トーチ11の円周動作の軌道の周方向の複数個所に対応させて、耐熱型の光学式又は磁気式の変位センサ29を設けてなる構成として、これらの変位センサ29により、上記枝管溶接機4の馬蹄型ガイド5を外嵌させた溶接対象の枝管2aと、その下方近傍の母管1との溶接個所に関する周方向複数個所の詳細な位置情報を得るようにしてもよい。この場合にも、ロボットコントローラ19では、上記周方向の複数個所で検出した位置情報を互いに連係させることで、溶接対象の枝管2aと母管1との実際の溶接個所について、他の枝管2の溶接時の熱により生じた母管1の撓みや歪み、及び、母管1における各枝管2の取付部分に設けてある図示しない孔の精度、更には、上記母管1に仮付けされている溶接対象の枝管2aの傾き等に起因する様々な誤差を含んだ状態で、周方向の全周に亘りその詳細な位置情報を得ることができる。
【0072】
又、枝管溶接機4の馬蹄型ガイド5を外嵌させた後に、溶接トーチ11のワイヤ20を用いたタッチセンシングにより、上記溶接対象の枝管2aと、その下方近傍の母管1との溶接個所に関し、予め周方向の全周に亘りその詳細な位置情報を得て、その位置情報を基に、多関節ロボットにずれ量を補正するためのティーチングを行ってから溶接を行わせるものとして示したが、ずれ量の補正を行いながら溶接を行わせるようにしてもよい。
【0073】
上記溶接対象の枝管2aに、枝管溶接機4の馬蹄型ガイド5を外嵌させた後に、溶接対象の枝管2aと、その下方近傍の母管1との溶接個所に関し、周方向の全周に亘りその詳細な位置情報を得ることが望ましいが、溶接時の熱による母管1の撓みや歪みが小さい場合や、母管1における各枝管2の取付部分に設ける図示しない孔の精度が十分に高い場合等には、上記枝管溶接機4の馬蹄型ガイド5を外嵌させた後に、溶接対象の枝管2aと、その下方近傍の母管1との溶接個所についてのタッチセンシングは省略してもよい。この場合は、溶接トーチ11へ供給するワイヤ20をタッチセンサ16に通電ライン21を介して接続する構成を省略できる。
【0074】
枝管検出センサは、母管1に仮付けされた溶接対象の枝管2aの少なくともX軸方向位置検出を行うことができ、且つ母管1に仮付けされた上記溶接対象の枝管2aとそれに隣接する他の枝管2との間に挿入する部分の水平方向の幅寸法が、母管1に仮付けされる溶接対象の枝管2aとそれに隣接する他の枝管2とのX軸方向の配列間隔に比して十分に小さいか又は小さくできるようにしてあり、更に、枝管溶接機4の馬蹄型ガイド5を溶接対象の枝管2aに対し横方向から外嵌させるときの該馬蹄型ガイド5の進行方向に対し直角な方向よりも前側に突出しない状態として旋回台13に取り付けることができれば、図示した以外の形状としてあってもよく、又、探触子14や変位センサ25,26以外のいかなる検出方式のものを採用してもよい。
【0075】
旋回台13における枝管検出センサの取付位置は、該旋回台13の制御や、溶接対象の枝管2aの位置情報の検出を行う際の演算等の処理を容易なものとするという観点からすると、上記旋回台13における枝管溶接機4の取付位置に対して旋回軸心13aを中心に周方向に90度又は180度又は270度のいずれかの方向に設定することが望ましいが、枝管溶接機4の馬蹄型ガイド5を溶接対象の枝管2aに対し横方向から外嵌させるときの該馬蹄型ガイド5の進行方向に対し直角な方向よりも前側に突出しない状態であれば、上記旋回台13における上記枝管検出センサの取付位置は、自在に変更してもよい。この場合であっても、溶接対象の枝管2aに対して上記枝管溶接機4の馬蹄型ガイド5を外嵌して溶接作業を実施する際、上記枝管検出センサが母管1に既設或いは仮付けされている他の枝管2に干渉する虞を解消することができるという効果が得られる。
【0076】
その他本発明の要旨を逸脱しない範囲内で種々変更を加え得ることは勿論である。
【符号の説明】
【0077】
1 母管
2a 溶接対象の枝管
4 枝管溶接機
5 馬蹄型ガイド(ガイド)
5a 切欠部
11 溶接トーチ
12 ロボットハンド
13 旋回台
13a 旋回軸心
14,14a 探触子(枝管検出センサ)
20 ワイヤ
22 変位センサ
25 変位センサ(枝管検出センサ)
26 変位センサ(枝管検出センサ)
【特許請求の範囲】
【請求項1】
ロボットのロボットハンドの先端部に設けた旋回台の旋回軸心と直交する方向の側面における溶接対象の枝管に外嵌させるための切欠部を有するガイドと、該ガイドに保持され且つ上記切欠部を超えて円周動作できるようにしてある溶接トーチとを備えてなる枝管溶接機の取付位置に対して、上記旋回台の旋回軸心を中心として90度以上、270度以下の範囲に収まるように設けた枝管検出センサを、母管に仮付けされた溶接対象の枝管に向けて配置して、該枝管検出センサにより上記溶接対象の枝管の母管長手方向に関する位置を検出し、次いで、上記旋回台の旋回により上記溶接対象の枝管に向けた上記枝管溶接機のガイドを、上記溶接対象の枝管に対し母管の長手方向に直交する水平方向の片側に配置した後、該枝管溶接機を、母管の長手方向に直交する水平方向に沿って移動させて、上記ガイドを上記溶接対象の枝管に外嵌させるようにすることを特徴とする自動溶接装置における溶接トーチの位置決め方法。
【請求項2】
枝管溶接機のガイドを溶接対象の枝管に外嵌させた後、上記枝管溶接機の円周動作する溶接トーチを、上記溶接対象の枝管の周りを移動させると共に、周方向の複数個所で、該溶接トーチのワイヤを探触子として、上記溶接対象の枝管の位置と、その下方近傍に位置する母管との溶接個所のタッチセンシングを行い、得られた位置情報を周方向に連係させて上記溶接個所の周方向の全周に亘りその詳細な位置情報を得て、その位置情報を基に、上記ロボットによる溶接トーチのずれ量を補正させるようにする請求項1記載の自動溶接装置における溶接トーチの位置決め方法。
【請求項3】
枝管検出センサにより、母管に仮付けされた溶接対象の枝管の上記母管の長手方向に関する位置に加えて、上記溶接対象の枝管の母管の長手方向に直交する水平方向の位置を検出し、枝管溶接機を、母管の長手方向に直交する水平方向に沿って移動させて、上記ガイドを上記溶接対象の枝管に外嵌させるときに、該溶接対象の枝管が、上記枝管溶接機の溶接トーチの円周動作する軌道の中央に配置される位置で枝管溶接機を停止させるようにする請求項1又は2記載の自動溶接装置における溶接トーチの位置決め方法。
【請求項4】
枝管溶接機を、母管の長手方向に直交する水平方向に沿って移動させて、ガイドを上記溶接対象の枝管に外嵌させるときに、上記ガイドにおける切欠部の奥側端部に設けた変位センサにより検出される溶接対象の枝管が、上記枝管溶接機の溶接トーチの円周動作する軌道の中央に配置される位置で枝管溶接機を停止させるようにする請求項1又は2記載の自動溶接装置における溶接トーチの位置決め方法。
【請求項5】
ロボットにより溶接対象の枝管に外嵌させるための切欠部を有するガイドと、該ガイドに保持され且つ上記切欠部を超えて円周動作できるようにしてある溶接トーチとを備えてなる枝管溶接機を操作できるようにしてある自動溶接装置におけるロボットのロボットハンドの先端部に旋回台を設けて、該旋回台の旋回軸心と直交する方向の側面に、上記枝管溶接機を取り付け、更に、上記旋回台における上記枝管溶接機の取付位置に対して、該旋回台の旋回軸心を中心として90度以上、270度以下の範囲に収まるように、母管に仮付けされた溶接対象の枝管について少なくとも母管の長手方向に関する位置を検出するための枝管検出センサを設けてなる構成を有することを特徴とする自動溶接装置における溶接トーチの位置決め装置。
【請求項1】
ロボットのロボットハンドの先端部に設けた旋回台の旋回軸心と直交する方向の側面における溶接対象の枝管に外嵌させるための切欠部を有するガイドと、該ガイドに保持され且つ上記切欠部を超えて円周動作できるようにしてある溶接トーチとを備えてなる枝管溶接機の取付位置に対して、上記旋回台の旋回軸心を中心として90度以上、270度以下の範囲に収まるように設けた枝管検出センサを、母管に仮付けされた溶接対象の枝管に向けて配置して、該枝管検出センサにより上記溶接対象の枝管の母管長手方向に関する位置を検出し、次いで、上記旋回台の旋回により上記溶接対象の枝管に向けた上記枝管溶接機のガイドを、上記溶接対象の枝管に対し母管の長手方向に直交する水平方向の片側に配置した後、該枝管溶接機を、母管の長手方向に直交する水平方向に沿って移動させて、上記ガイドを上記溶接対象の枝管に外嵌させるようにすることを特徴とする自動溶接装置における溶接トーチの位置決め方法。
【請求項2】
枝管溶接機のガイドを溶接対象の枝管に外嵌させた後、上記枝管溶接機の円周動作する溶接トーチを、上記溶接対象の枝管の周りを移動させると共に、周方向の複数個所で、該溶接トーチのワイヤを探触子として、上記溶接対象の枝管の位置と、その下方近傍に位置する母管との溶接個所のタッチセンシングを行い、得られた位置情報を周方向に連係させて上記溶接個所の周方向の全周に亘りその詳細な位置情報を得て、その位置情報を基に、上記ロボットによる溶接トーチのずれ量を補正させるようにする請求項1記載の自動溶接装置における溶接トーチの位置決め方法。
【請求項3】
枝管検出センサにより、母管に仮付けされた溶接対象の枝管の上記母管の長手方向に関する位置に加えて、上記溶接対象の枝管の母管の長手方向に直交する水平方向の位置を検出し、枝管溶接機を、母管の長手方向に直交する水平方向に沿って移動させて、上記ガイドを上記溶接対象の枝管に外嵌させるときに、該溶接対象の枝管が、上記枝管溶接機の溶接トーチの円周動作する軌道の中央に配置される位置で枝管溶接機を停止させるようにする請求項1又は2記載の自動溶接装置における溶接トーチの位置決め方法。
【請求項4】
枝管溶接機を、母管の長手方向に直交する水平方向に沿って移動させて、ガイドを上記溶接対象の枝管に外嵌させるときに、上記ガイドにおける切欠部の奥側端部に設けた変位センサにより検出される溶接対象の枝管が、上記枝管溶接機の溶接トーチの円周動作する軌道の中央に配置される位置で枝管溶接機を停止させるようにする請求項1又は2記載の自動溶接装置における溶接トーチの位置決め方法。
【請求項5】
ロボットにより溶接対象の枝管に外嵌させるための切欠部を有するガイドと、該ガイドに保持され且つ上記切欠部を超えて円周動作できるようにしてある溶接トーチとを備えてなる枝管溶接機を操作できるようにしてある自動溶接装置におけるロボットのロボットハンドの先端部に旋回台を設けて、該旋回台の旋回軸心と直交する方向の側面に、上記枝管溶接機を取り付け、更に、上記旋回台における上記枝管溶接機の取付位置に対して、該旋回台の旋回軸心を中心として90度以上、270度以下の範囲に収まるように、母管に仮付けされた溶接対象の枝管について少なくとも母管の長手方向に関する位置を検出するための枝管検出センサを設けてなる構成を有することを特徴とする自動溶接装置における溶接トーチの位置決め装置。
【図1】


【図2】

【図3】

【図4】

【図5】
【図6】
【図7】
【図8】

【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−173138(P2011−173138A)
【公開日】平成23年9月8日(2011.9.8)
【国際特許分類】
【出願番号】特願2010−37508(P2010−37508)
【出願日】平成22年2月23日(2010.2.23)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
【公開日】平成23年9月8日(2011.9.8)
【国際特許分類】
【出願日】平成22年2月23日(2010.2.23)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
[ Back to top ]